基于正交多项式法的动力吸振器安装点的等效质量识别
2014-05-17杨志坚吴钦杰
何 山,杨志坚,2,丁 康,吴钦杰
(1.华南理工大学机械与汽车工程学院,广州 510640;
2.重庆理工大学汽车零部件先进制造技术教育部重点实验室,重庆 400054)
基于正交多项式法的动力吸振器安装点的等效质量识别
何 山1,杨志坚1,2,丁 康1,吴钦杰1
(1.华南理工大学机械与汽车工程学院,广州 510640;
2.重庆理工大学汽车零部件先进制造技术教育部重点实验室,重庆 400054)
在动力吸振器的设计过程中,为方便匹配和寻找动力吸振器的最优参数,需要识别主系统在安装点的等效质量来将其简化为单自由度系统。针对传统质量感应法操作复杂、识别精度低的缺点,采用正交多项式法来识别主系统的等效质量,通过仿真与实验相结合验证对比正交多项式法和质量感应法的识别结果。结果表明正交多项式法相对于质量感应法识别精度高,实验结果和仿真结果较好的吻合,且通过实验验证利用正交多项式法匹配的动力吸振器有较优的吸振效果,基本符合不动点理论的最优条件。
动力吸振器;正交多项式法;等效质量
在动力吸振器设计过程中,需要根据其安装点的特性对主系统作简化,从而获得主系统的等效质量,等效刚度以及等效阻尼。对于这三个参数,在原点频响函数测得的情况下,只要识别出等效质量,能够方便地推算出等效刚度和等效阻尼。因此,在主系统的简化过程中,关键在于识别等效质量。
等效质量的传统识别方法有特征向量法[1]、质量感应法[2-3]等。其中特征向量法是利用总能量相等的原则,把离散化之后的主系统所有位置的振动总能量等价到动力吸振器的安装点上,这种方法的识别精度与离散的点数有关,需要先做模态分析离散系统以及计算振型向量,计算量大、操作复杂,因此使用不广泛。而质量感应法是目前使用较普遍的一种方法,其原理是在主系统上附加一个质量,改变其固有频率,通过附加质量前后的固有频率关系来推算出主系统的等效质量,该方法直观易懂、原理简单,操作较特征向量法方便。
近年来,随着模态参数识别方法的发展,在频响函数的拟合和参数识别方面有很大进步[4-5],拟合精度高且稳定性好,有一定的抗噪性。因此,本文选用正交多项式法作为等效质量的识别方法,用以对比传统的质量感应法,分析该算法的优劣。该方法只需要测得动力吸振器安装点的原点频响函数,选定拟合的频段即可识别出该频段内主系统的等效质量、等效刚度以及阻尼比。
1 正交多项式法原理
系统频响函数用正交多项式的形式表示为

其中:N为模态阶数;ak和bk(k=0,1,2,…,2N)为正交多项式系数,均为有理数。pi(jω)和qi(jω)均为第i阶正交多项式。
构造正交多项式,通过推导频响的误差函数,以其作为目标函数,解方程组即可求出待定系数ak和bk(k=0,1,2,…,2N),具体步骤见参考文献[6]。

2 单自由度系统识别
仿真一个质量为m=1 kg,固有频率在f=50 Hz,阻尼比为0.005的单自由度系统,其位移幅频函数如图1所示,频率分辨率为0.1 Hz。通过正交多项式拟合而得的位移幅频函数(红色实线)与原始位移幅频函数(黑色虚线)基本完全重合。拟合所得的等效质量为m1=0.999 9 kg,误差为0.01%,与原系统相当接近。
对比质量感应法,在该系统上附加一个0.1 kg的附加质量,由公式
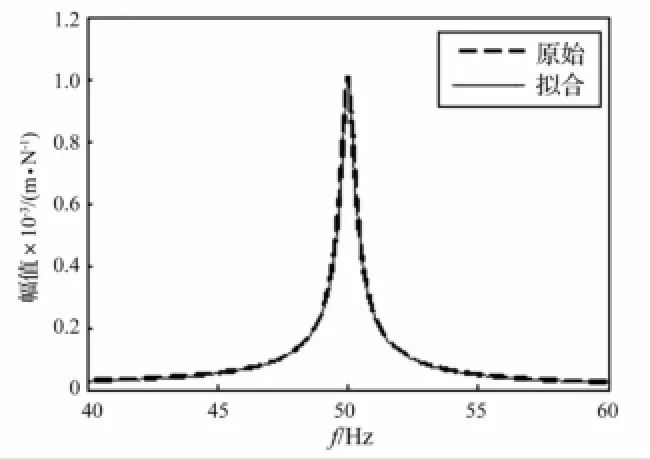
图1 单自由度系统位移幅频函数拟合Fig.1 Single degree of freedom system FRF fitting

计算可得m2=1.012 5 kg,误差为1.25%,相比正交多项式法误差较大,而提高频率分辨率为0.01之后,识别出的等效质量m2=1.003 2 kg,误差降低为0.32%。由此可见,在单自由度系统中,正交多项式法和质量感应法的识别效果都较准确,但质量感应法的误差大小较依赖于频率分辨率的高低。
3 平面框架仿真与实验
3.1 平面框架仿真模型的建立与实验验证
利用LMSVirtual.Lab按实际尺寸建立平面框架的仿真模型,框架尺寸为800mm×300mm×11.2mm,杨氏模量为2.26×1011N/m2,泊松比为0.291,对有限元模型做自由模态仿真,并与实验结果做对比。
结果如图2、3所示,仿真结果和实验结果的前两阶模态的振型和固有频率基本吻合,因此,可以使用该有限元模型作为验证实验结果的标准。

图2 第一阶振型Fig.2 The first order vibrationmode
3.2 平面框架的等效质量识别
以框架的第一阶固有频率作为吸振频率,则动力吸振器应安装在第一阶振型的幅值点,即长边中点处。使用力锤激励测得该点的原点位移幅频函数,分别用正交多项式法和质量感应法识别其等效质量。
(1)利用正交多项式法识别等效质量,选取70 Hz~80 Hz作为拟合频段,拟合结果如图4所示,拟合频响和实验测得频响完全重合,拟合精度很高。

图3 第二阶振型Fig.3 The second order vibration mode
(2)利用质量感应法识别等效质量,在该点附加一个1 kg的质量块,如图5所示,测得附加质量块前后的固有频率。
同时,利用LMSVirtual.Lab对上述两种方法进行仿真,其中质量感应法直接在安装点附加一个1 kg的集中质量,如图6所示,仿真安装位置的原点位移幅频函数。将实验结果与仿真结果作对比,结果见表1。
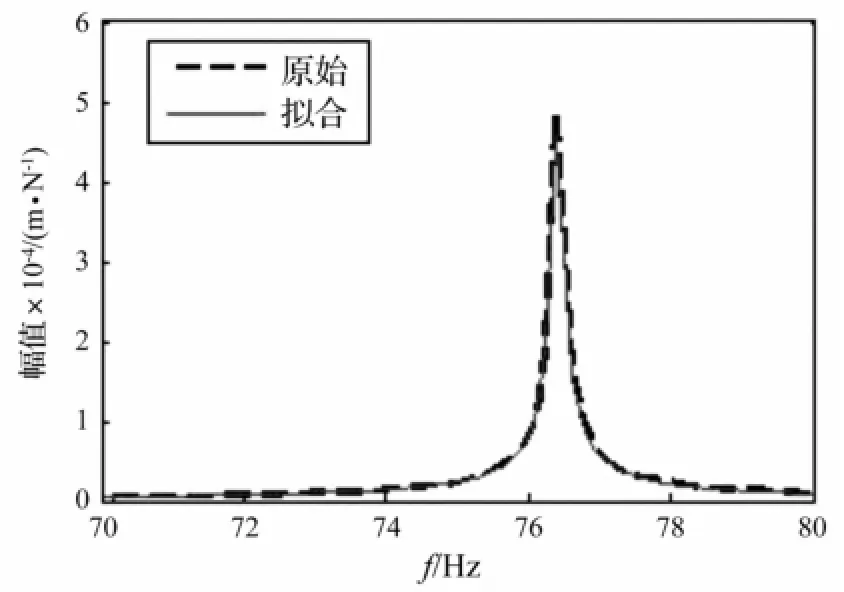
图4 框架实验位移幅频函数拟合Fig.4 Framework experiment FRF fitting

图5 质量感应法识别等效质量Fig.5 Mass responsemethod estimating equivalentmass
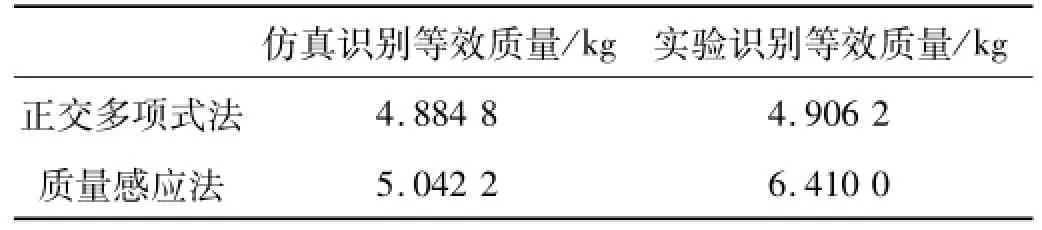
表1 等效质量识别结果Tab.1 Equivalentm ass identification results
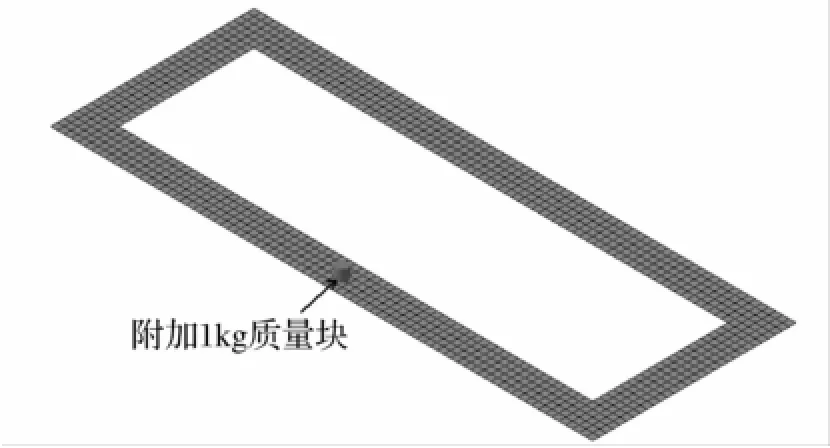
图6 安装点附加1 kg的集中质量Fig.6 Add 1kg concentrated mass onmounting point
分析表1中数据可知:①若只对比两种方法的仿真结果,识别出来的等效质量较接近,证明在理论上两种方法都是可行的;②利用正交多项式法的实验结果与仿真结果非常接近,识别效果很好。③利用传统质量感应法的实验结果与仿真结果相差较大。分析原因可能是由于附加质量增加了主系统在这个位置的局部刚度,修改仿真模型,在附加质量附近利用刚性蜘蛛网约束周围几个节点,再进行仿真而得的等效质量是6.6 kg,与实验结果相接近。因此,证明在实验中,附加质量会提高安装点附近的局部刚度,使得固有频率增大,因此等效质量增加。
3.3 安装动力吸振器的效果对比
加工一个质量、刚度和阻尼可调的动力吸振器,其结构如图7所示。质量块和橡胶之间、橡胶和底座之间均采用过盈配合固定。①通过替换质量块,可以方便地调整动力吸振器的质量;②改变质量块与橡胶的接触深度h,可以在较大范围内调节动力吸振器的刚度,而拧紧(松)固定橡胶的螺母,则在小范围内调节其刚度;③通过替换不同的橡胶配方,能够分级改变其阻尼。
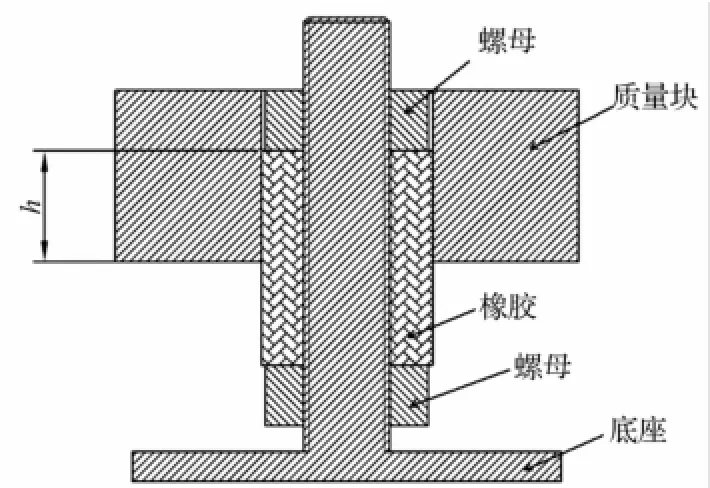
图7 动力吸振器剖视图Fig.7 DVA cutaway view
通过上述两种方法计算出的等效质量,把主系统简化为单自由度系统。利用无阻尼的不动点理论分别匹配两组不同的动力吸振器参数[7],选定动力吸震器质量为0.5 kg,则其他参数匹配结果见表2。
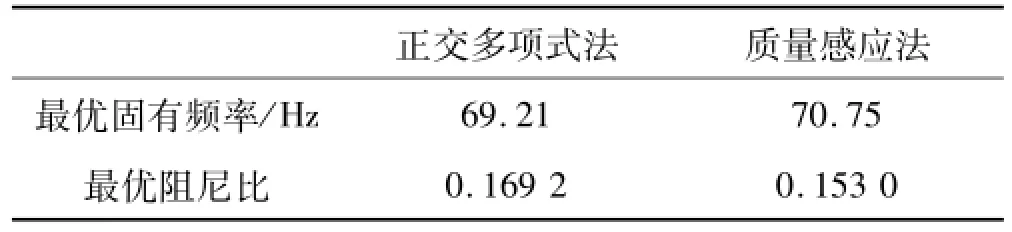
表2 动力吸震器参数匹配Tab.2 DVA parameter matching
根据阻尼比值,选择45NR+SBR材料的橡胶,在长边中点安装动力吸振器,如图8所示。将动力吸振器用502胶水粘在铁地板上,利用锤击测试并分别调节动力吸振器固有频率至表中的计算最优固有频率,测安装吸振器前后的原点频响,频率分辨率设为0.25 Hz。
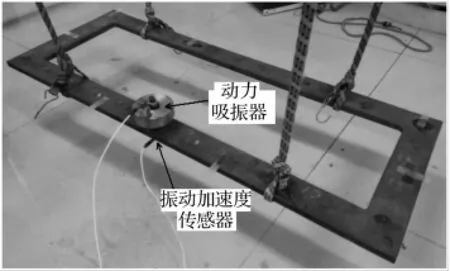
图8 安装动力吸振器后测原点位移幅频函数Fig.8 Measure FRF aftermounting DVA
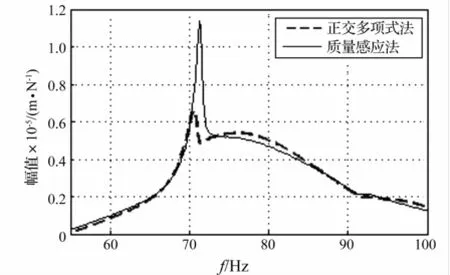
图9 安装动力吸振器后的原点频响对比Fig.9 FRF contrast aftermounting DVA
实测位移幅频函数如图9所示,可得结论:①对比图4和图9可知,由于框架阻尼太小,在未安装动力吸振器之前位移幅频函数的峰值达到5×10-4m/N,而安装动力吸振器能够把幅值有效抑制在1.2×10-5m/N以内。②对比图9内的两条频响可知,以正交多项式法识别的等效质量来匹配的吸振器最大幅值较小,且出现了较明显的两个峰,两边的峰值高度很接近,基本符合不动点理论的最优条件;而以质量感应法识别的等效质量来匹配的吸振器最大幅值大一点,左边的峰值明显大于右边的峰值,吸振效果并非最优。
4 结 论
利用正交多项式法识别动力吸振器安装点的等效质量,并与传统的质量感应法进行对比,通过仿真与实验结合验证了正交多项式法优于质量感应法。
相对于质量感应法,正交多项式法有如下优点:
(1)正交多项式法操作相对方便,只需要测一次安装点的原点位移幅频函数即可;而质量感应法则需分别测安装质量块前后的原点位移幅频函数。
(2)质量感应法由于需要直接读取峰值频率,因此其受频率分辨率影响较大,而正交多项式法对频率分辨率并不敏感。
(3)正交多项式法的实验结果和仿真结果较好吻合,而质量感应法在实验中附加质量会增加安装点的局部刚度,导致固有频率上升,使得识别的等效质量较真实值大。
(4)利用正交多项式法识别的等效质量来计算匹配的动力吸振器吸振效果较好,基本符合不动点理论的最优条件。
[1]李玩幽,刘妍.动力吸振器优化设计中等效质量的简化求解法[J].集美大学学报(自然科学版),2000,5(3):50-53.
LIWan-you,LIU Yan.Method of estimating equivalentmass in optimum design of vibration absorber[J].Journal of Jimei University(Natural Science),2000,5(3):50-53.
[2]背户一登,任明章译.动力吸振器及其应用[M].北京:机械工业出版社,2013.
[3]Kazuto S,Masaaki O,Shigeo Y.Method of estimating equivalentmass ofmulti-degree-of-freedom system[J].JMSE,1987,30(268):1638-1644.
[4]傅志方,华宏星.模态分析理论与应用[M].上海:上海交通大学出版社,2000.
[5]沃德海伦.白化同,郭继忠译.模态分析理论与试验[M].北京:北京理工大学出版社,2002.
[6]Richardson MH.Fomenti D L.Parameter estimation from frequency response mensurements using rational fraction polynominals[C].Prosented at1stIMAC Conference.Orlando.FL,Nov.8 10,1982.
[7]王琳.动力吸振器的参数设计和动力学分析[D].石家庄:石家庄铁道大学,2012.
Estim ating equivalentmass of a dynamic vibration absorber atm ounting point based on method of orthogonal polynom ials
HE Shan1,YANG Zhi-jian1,2,DINGKang1,WU Qing-jie1
(1.School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510640,China;
2.MOE Key Laboratory of Advanced Manufacturing Technology for Automobile Parts,Chongqing University of Technology,Chongqing 400054,China)
For the convenience ofmatching the optimal parametersof a dynamic vibration absorber,itsmain system needs to be simplified to a 1-DOF system by estimating its equivalentmass atmounting point.As the traditionalmass response method has shortcomings of complex operation and low identification accuracy.Here,the orthogonal polynomials were used to estimate the equivalentmass.Then,the results of the orthogonal polynomialmethod and themass response method were compared through combination of simulation and test.The results showed that the orthogonal polynomial method's identification precision is high,the test results are close to the simulation ones.In addition,through tests,itwas shown that using the method of orthogonal polynomial to match with a dynamic vibration absorber has a better vibration reduction effect being coincidentwith the optimal conditions of the fixed point theory.
dynamic vibration absorber;orthogonal polynomials;equivalentmass
TB535.1
A
10.13465/j.cnki.jvs.2014.24.035
汽车零部件先进制造技术教育部重点实验室2010年度开放基金资助(2010KLMT04)
2013-08-08 修改稿收到日期:2014-02-20
何山男,硕士生,1988年11月生
杨志坚男,博士生,副教授,1982年1月生