基于Sim scape的理想地棚阻尼被动实现方法研究
2014-05-17张孝良聂佳梅
张孝良,聂佳梅,陈 龙
(1.江苏大学汽车工程研究院,江苏镇江 212013;2.江苏大学汽车与交通工程学院,江苏镇江 212013)
基于Sim scape的理想地棚阻尼被动实现方法研究
张孝良1,聂佳梅2,陈 龙1
(1.江苏大学汽车工程研究院,江苏镇江 212013;2.江苏大学汽车与交通工程学院,江苏镇江 212013)
利用质量元件与惯容器之间的振动状态转换现象,提出理想地棚阻尼的被动实现方法,设计了被动地棚阻尼悬架,建立惯容器Simscape模型,采用物理拓扑网络方式构建整车Simscape模型,通过比较传统被动悬架、理想与被动地棚阻尼悬架系统性能,检验理想地棚阻尼被动实现方法的正确性与有效性。结果表明,被动地棚阻尼悬架系统能够抑制车轮共振,使轮胎动载荷均方根值减小30%以上,大幅提高了车辆的行驶安全性,与理想地棚阻尼悬架性能基本一致。
车辆;悬架;被动实现;惯容器;地棚阻尼;Simscape
理想地棚阻尼能够抑制非簧载质量的共振,提高汽车的操纵稳定性[1-3]。但理想地棚阻尼虚拟安装于车轮与惯性参考系之间,无法被动实现,通常以主动、半主动悬架为载体,采用地棚阻尼控制策略间接实现。尽管主动作动装置能够产生与理想地棚阻尼力完全相等的输出控制力,但这要以高的能耗为代价。对于可调阻尼减振器这类半主动装置,由于它只能耗散振动能量,无法提供能量,因而无法产生与理想地棚阻尼力完全相等的输出控制力,只能通过调整阻尼系数部分地实现类似理想地棚阻尼的效果。
惯容器(Inerter)的出现,“惯容-弹簧-阻尼”悬架结构新体系的提出为进一步提高汽车悬架性能提供了一个新的平台[4-6]。目前,国内外学者[7-11]基于“惯容-弹簧-阻尼”悬架结构体系,开展了惯容器在提高汽车乘坐舒适性、操纵稳定性和降低能耗等方面的应用研究,并取得了重要进展。“惯容-弹簧-阻尼”悬架结构新体系的出现,使得理想地棚阻尼的被动实现成为可能。
Simscape采用物理拓扑网络方式构建模型,用户的建模过程如同装配真实的物理系统,不用推导和化简复杂的数学方程,采用Simscape建模可以有效缩短悬架设计周期和降低设计成本[12]。但惯容器是一种新的机械元件,相应的Simscape模型还没有建立,因此,无法利用Simscape设计和研究“惯容-弹簧-阻尼”悬架系统。文中首先建立惯容器的Simscape模型,利用质量元件与惯容器之间的振动状态转换现象,提出理想地棚阻尼的被动实现方法,设计被动地棚阻尼悬架;然后,建立悬架的整车Simscape模型,比较分析传统被动悬架、理想与被动地棚阻尼悬架系统的综合性能,验证理想地棚阻尼被动实现方法的正确性与有效性。
1 惯容器的Sim scape模型
惯容器,与弹簧和阻尼器一样,具有两个独立、自由的端点,是一种真正的两端点元件[4]。现有惯容器装置包括齿轮齿条惯容器、滚珠丝杠惯容器、流体惯容器等[5,13-14]。惯容器产生的惯性力可以用下式表示[4]

其中:b为惯容器惯容系数(Inertance),单位是kg;a1,a2为惯容器两个端点的绝对加速度。
质量元件产生的惯性力可以用下式表示

其中:m为质量;a为绝对加速度。
在式(1)中令a1=0,则式(1)和式(2)的表达完全相同,说明一个端点“接地”的惯容器就相当于质量元件,而且,惯容器和质量元件具有相同的单位kg。可见,惯容器是惯性元件的一般形式,而质量元件是惯性元件的一种特殊形式,惯容器产生的惯性力与相对加速度有关,而质量元件产生的惯性力与绝对加速度有关。
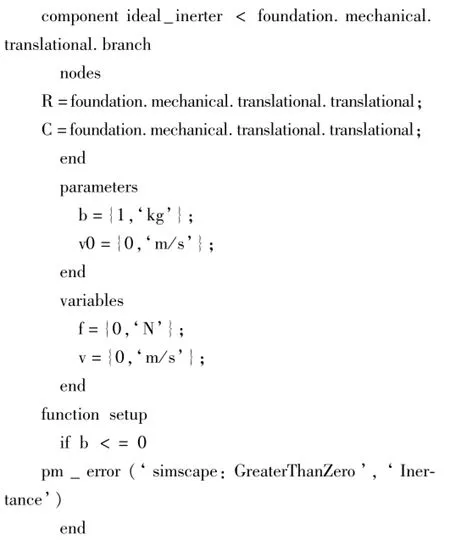
根据式(1)建立惯容器的Simscape模型,模型代码如下:

2 理想地棚阻尼的被动实现
2.1 振动状态转换
对于弹簧刚度分别为k与kt、簧上和簧下质量分别为m2与m1的双质量系统,簧下质量的共振频率为

将弹簧刚度为k1、惯容系数为b的弹簧与惯容器并联体插入簧下质量之下形成的新系统如图1所示。
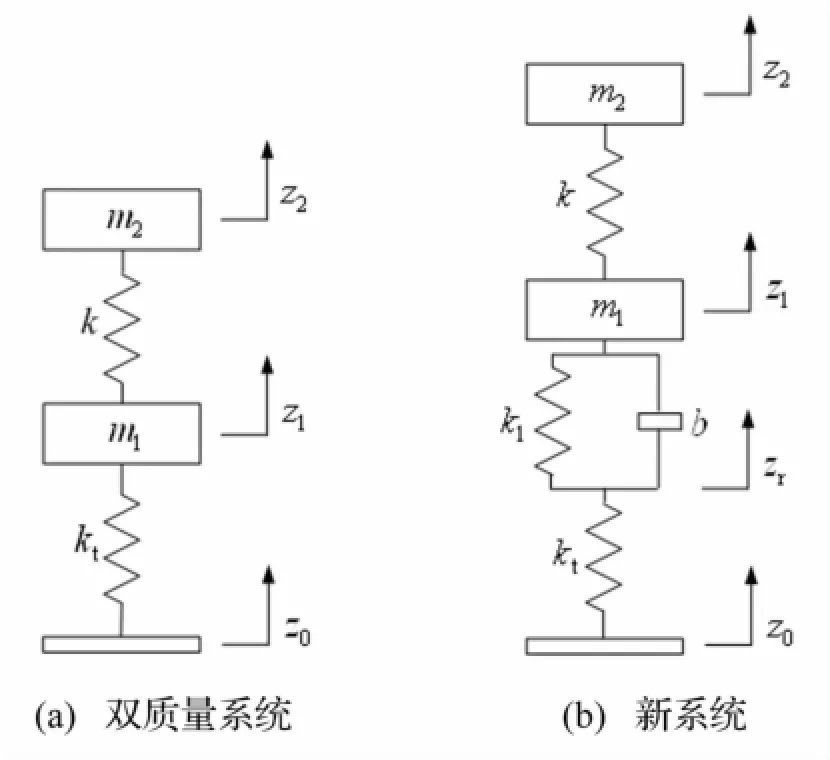
图1振动状态转换Fig.1 Vibration state transfer


由式(5)可知,此时,弹簧与惯容器并联体发生并联谐振,作用于弹簧和惯容器两端的力互相抵消。因此,当ω=ωA=ωR时,新系统可以将簧下质量的共振转换为惯容器的共振,从而消除簧下质量的共振。
2.2 理想地棚阻尼的被动实现方法
被动地棚阻尼悬架系统是理想地棚阻尼悬架系统的被动实现系统,如图1所示。理想地棚阻尼的被动实现方法就是被动地棚阻尼悬架结构及参数的确定方法。
被动地棚阻尼悬架结构的确定方法如下:
(1)图2(a)中,在簧下质量之下插入并联的弹簧和惯容器;
(2)将地棚阻尼与惯容器并联,确定的被动地棚阻尼悬架系统如图2(b)所示。

图2 地棚阻尼悬架系统Fig.2 Groundhook damping suspension system
理想地棚阻尼悬架系统的参数是已知的,包括地棚阻尼系数cgnd、簧上质量m2、弹簧刚度k、阻尼系数c、簧下质量m1和轮胎等效刚度kt。在被动地棚阻尼悬架系统中,除弹簧刚度k1和惯容系数b未知外,其它参数与理想地棚阻尼悬架系统相同,因此,被动地棚阻尼悬架参数的确定就是确定参数k1和b,确定方法如下:
(1)去掉图2(a)中理想地棚阻尼悬架系统中的地棚阻尼,计算簧下质量的共振频率为

(2)在图2(b)中,由簧下质量及其下弹簧和惯容器组成的“惯容-弹簧-质量”系统反共振频率分别为

(3)由反共振频率ω1A与共振频率ω1相等,确定的
k1与b的关系为

(4)将簧下质量的位移传递率作为优化问题的目标函数,令k1=kt、b=k1m1/(k+kt)作为k1和b的初始值,求解该优化问题得到k1和b的值。
被动地棚阻尼悬架系统,利用“惯容-弹簧-质量”系统反共振现象,将簧下质量的共振转换为惯容器的共振,抑制了簧下质量的共振,将地棚阻尼吸收簧下质量的振动能量,转化为吸收惯容器的振动能量,解决了理想地棚阻尼要求阻尼元件与惯性参考系相连的技术问题,从而被动地实现了理想地棚阻尼。
3 整车Sim scape模型
被动地棚阻尼悬架系统整车模型如图3所示。

图3 整车模型Fig.3 Full carmodel
图3中,mb为悬挂质量;mwi为轮i处非悬挂质量;θ为车身俯仰角;φ为车身侧倾角;Iθ为车身俯仰转动惯量;Iφ为车身侧倾转动惯量;zc为质心垂直位移;zbi为轮i处车身垂直位移;zri为轮i处轮胎等效刚度弹簧上端垂直位移;zwi为轮i处非悬挂质量垂直位移;zgi为轮i处路面垂直位移;lf,lr分别为前、后轴至质心的距离;tf,tr分别为前、后轮距的一半;k1i为悬架i悬架刚度;c1i为悬架i悬架阻尼系数;b2i为惯容器i惯容系数;k0i为与惯容器i并联弹簧的弹簧刚度;cgnd_i与惯容器i并联地棚阻尼的阻尼系数;kti为轮i轮胎刚度。
被动地棚阻尼悬架系统的整车Simscape模型如图4所示。
在图4所示的Simscape模型中,假设车身是一个刚体,当车辆在水平面做匀速直线运动时,车身具有上下跳动、俯仰、侧倾三个自由度。通过车身模块可以获得车身的质心垂直速度、俯仰和侧倾角速度以及车身的垂直位移和速度信号。利用Simscape中的运动传感器和力传感器可以获得非簧载质量的垂直位移和轮胎力信号。上述信号经过信号处理模块可以得到质心垂直加速度、车身垂直、俯仰和侧倾加速度、悬架动行程及轮胎动载荷。
取积分白噪声的时域表达式作为路面输入模型,其输入方程为

图4 整车Simscape模型Fig.4 Full car simscapemodel

式中:w(t)均值为零的Gauss白噪声;G0为路面不平度系数;u车辆行驶速度。
文献[15]对按积分白噪声时域表达式生成的路面谱进行了严格验证,这里不再验证。
整车模型相关参数见表1。

表1 整车模型参数Tab.1 Parameters of full car model

图5 功率谱密度Fig.5 Power spectral density
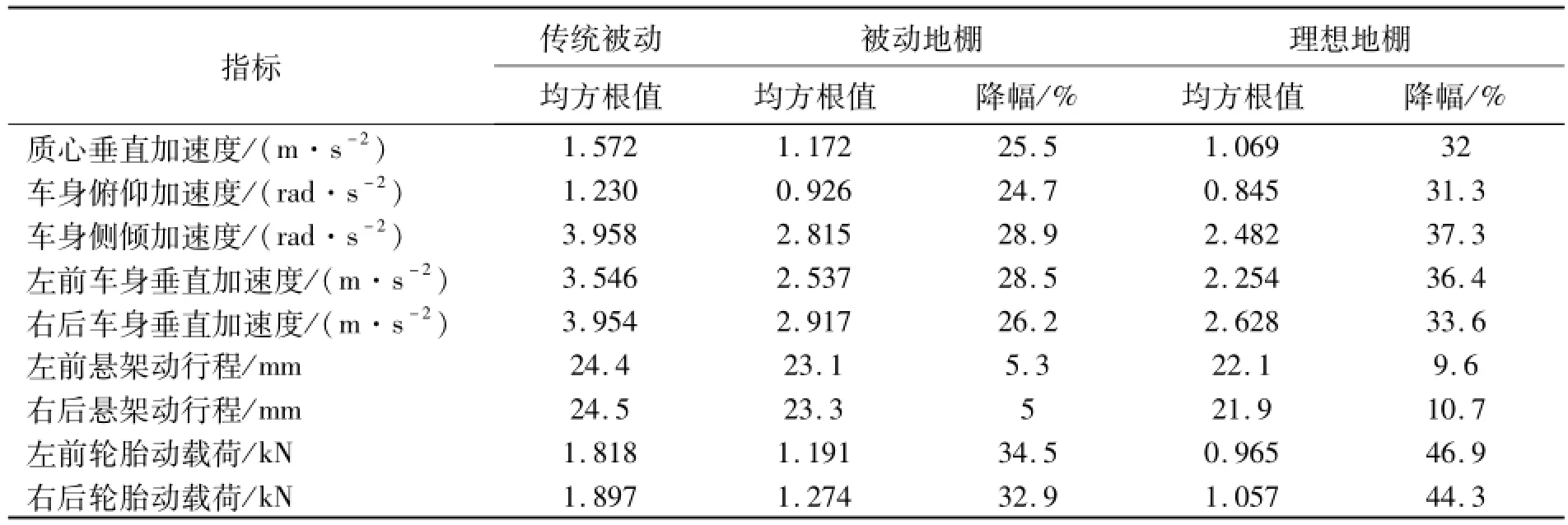
表2 均方根值Tab.2 Rootmean square values
4 仿真分析
车辆以u=20 m/s驶过不平度系数为G0=5× 10-6m3/cycle的路面时,系统时域响应输出的均方根值和功率谱密度分别如表2和图5所示。
由图5可以看出,与传统被动悬架相比,在5~15 Hz的高频部分,被动和理想地棚阻尼悬架系统的质心垂直加速度、车身俯仰和侧倾加速度以及轮胎动载荷功率谱密度明显减小,说明车轮共振得到有效抑制,但在簧上质量固有频率处,悬架性能有轻微恶化。
由表2可知,与传统被动悬架相比,理想地棚阻尼悬架系统的质心垂直加速度、车身俯仰和侧倾加速度均方根值减小了30%,轮胎动载荷均方根值减小了40%,悬架动行程均方根值减小了10%;被动地棚阻尼悬架系统的质心垂直加速度、车身俯仰和侧倾加速度均方根值减小了25%,轮胎动载荷均方根值减小了33%,悬架动行程均方根值减小了5%。可见,被动地棚阻尼悬架大幅改善了车辆的行驶安全性。
结合图5和表2可以看出,从车轮共振的抑制程度和各均方根值的减小程度上来看,被动地棚阻尼悬架系统实现了理想地棚阻尼悬架系统的主要功能,说明理想地棚阻尼的被动实现方法是正确和有效的。
综合上述,被动地棚阻尼悬架系统提高车辆行驶安全性的机理是:惯容器和弹簧的并联体与簧下质量发生了反共振,将簧下质量的振动转换为惯容器的振动(惯容器振动能量被地棚阻尼吸收),抑制了簧下质量的振动,从而减小了轮胎振动,改善了轮胎接地性能,提高了车辆的行驶安全性。
5 结 论
(1)建立了惯容器新型机械元件的Simscape模型,解决了无法利用Simscape来设计和研究“惯容-弹簧-阻尼”悬架系统问题。
(2)提出理想地棚阻尼的被动实现方法,设计了被动地棚阻尼悬架,建立悬架的整车Simscape模型,通过仿真分析检验上述实现方法的正确性。结果表明,被动混合阻尼悬架系统能够抑制车轮共振,实现理想地棚阻尼悬架主要功能,说明理想混合阻尼的被动实现方法是正确和有效的。
(3)与传统被动悬架相比,被动地棚阻尼悬架系统能够使质心垂直加速度、车身俯仰和侧倾加速度均方根值减小25%,轮胎动载荷均方根值减小33%,悬架动行程均方根值减小5%,大幅提高了车辆的行驶安全性。
[1]Valášek M,Novák M,šika Z,et al.Extended ground-hook:New concept of semi-active control of truck's suspension[J].Vehicle System Dynamics,1997,27(5):289-303.
[2]Goncalves F D,Ahmadian M.A hybrid control policy for semi-active vehicle suspensions[J].Shock and Vibration,2003,10(1):59-69.
[3]Ihsan S I,Faris WF,Ahmadian M.Analysis of control policies and dynamic response of a Q-Car 2-DOF sem i active system[J].Shock and Vibration,2008,15(5):573-582.
[4]Smith MC.Synthesis of mechanical networks:the inerter[J].IEEE Transactions on Automatic Control,2002,47(10):1648-1662.
[5]Sm ith MC.Performance benefits in passive vehicle suspensions employing inerters[J].Vehicle System Dynamics,2004,42(4):235-257.
[6]王富正.行政院国家科学委员会专题研究计划书成果报告——惯质之观念及控制之应用[R].台北:国立台湾大学机械工程系暨研究所,2004:1-7.
[7]Scheibe F,Smith MC.Analytical solutions for optimal ride comfort and tyre grip for passive vehicle suspensions[J].Vehicle System Dynamics,2009,47(10):1229-1252.
[8]Kuznetsov A,Mammadov M,Sultan I,et al.Optimization of improved suspension system with inerter device of the quartercar model in vibration analysis[J].Archive of Applied Mechanics,2010:1-11.
[9]Zhang Xin-jie,Ahmadian M,Guo Kong-hui.A comparison of a semi-active inerter and a semi-active suspension[J].SAE Paper,No:2010-01-1903,2010.
[10]陈龙,张孝良,聂佳梅,等.基于半车模型的两级串联型ISD悬架性能分析[J].机械工程学报,2012,48(6):102-108.
CHEN Long,ZHANG Xiao-liang,NIE Jia-mei,et al.Performance analysis of two-stage series-connected ISD suspension based on half-car model[J].Journal of Mechanical Engineering,2012,48(6):102-108.
[11]Li Chuan,Liang Ming,Yu Qi-bing.Multi-objective optimization of vehicle passive suspension with a two-terminal mass using chebyshev goal programming[J].World Academy of Science,Engineering and Technology,2011,14:634-638.
[12]MathWorks.Simscape user's guide[EB/OL].http://www.mathworks.cn/help/pdf_doc/physmod/simscape/simscape_ug.pdf.2013-9.
[13]Chen MZQ,Papageorgiou C,Scheibe F,et al.Themissing mechanical circuit element[J].IEEE Circuits and Systems Magazine,2009,9(1):10-26.
[14]林子谦.惯质模型的实现[D].台北:国立台湾大学,2007.
[15]王先云.用于车辆平顺性仿真的随机路面构造[J].科学技术与工程,2011,11(35):8797-9799.
WANGXian-yun.The constructionmethod of random road for simulating vehicle’s ride quality[J].Science Technology and Engineering,2011,11(35):8797-9799.
Passive realization method for ideal groundhook damping based on Sim scape
ZHANG Xiao-liang1,NIE Jia-mei2,CHEN Long1
(1.Automotive Engineering Research Institute,Jiangsu University,Zhenjiang 212013,China;
2.School of Automotive and Traffic Engineering,Jiangsu University,Zhenjiang212013,China)
Based on vibration states transition between mass elements and inerters,a passive realization method for ideal ground hook damping was presented.According to such a method,a passive groundhook-damping suspension was designed.After the Simscape model of a inerter was built,the full-car Simscape model was established by using the network approach of physical topology.By comparing the performances of a conventional passive suspension and an ideal and passive groundhook-damping suspension,the correctness and effective-ness of the proposed passive realizationmethod were verified.The results showed that the proposed passive ground hook damping suspension can be used to suppress wheel resonance,reduce RMS values of dynamic tire load by 30%or greater,and significantly improve the ride safety of vehicles,the performances of a passive groundhook-damping suspension are basically the same as those of an ideal ground hook damping suspension.
vehicle;suspension;passive realization;inerter;groundhook damping;Simscape
U463
A
10.13465/j.cnki.jvs.2014.24.005
国家自然科学基金资助项目(51405202);江苏省自然科学基金资助项目(BK20130521);江苏省科技支撑计划(工业)资助项目(BE2013096)
2013-11-01 修改稿收到日期:2014-01-02
张孝良男,博士,讲师,1979年1月生