森林灭火航弹智能观瞄投放控制系统设计
2014-05-15刘少刚周钊张书宇赵丹郭云龙李晓伟
刘少刚,周钊,张书宇,赵丹,郭云龙,李晓伟
1. 哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001
2. 哈尔滨第一机器制造集团有限公司 机械制造分公司,黑龙江 哈尔滨 150056
森林灭火航弹智能观瞄投放控制系统设计
刘少刚1,周钊1,张书宇2,赵丹1,郭云龙1,李晓伟1
1. 哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001
2. 哈尔滨第一机器制造集团有限公司 机械制造分公司,黑龙江 哈尔滨 150056
研制出一种森林灭火航弹智能观瞄投放控制系统,提高森林灭火航弹的灭火效率。文中以工控机为控制系统核心,通过RS232-CAN转换器向CAN总线分布式通讯节点实时地发布控制命令以及接收反馈数据,实现森林灭火航弹智能观瞄投放控制系统的高效实时可靠运行。文中描述了控制系统的硬件构成以及软件实现流程,并且对控制系统进行了相关功能的调试实验,经过实验验证,设计的森林灭火航弹智能观瞄投放控制系统可以正常运行,完成相应的控制功能。
森林灭火航弹;智能观瞄;CAN总线;分布式通讯节点;人机交互界面;控制系统
在森林火灾消防领域中,以树冠火的危害最大,也最难扑灭。由于树冠火的特殊性,到目前为止,世界上还没有能够对其进行远程迅疾压制性扑救的消防设备。树冠火多发生在树脂成分较多的针叶林,遇到大风天气由树冠火产生的气旋形成的火旋风可将燃烧的树枝、树皮刮到几十米、数百米甚至几公里远的前方形成新的火点。所以,一旦发生并蔓延,森林里用于防火的隔离带根本起不到防火作用。而现有灭火装备和方法又都无法直接将其扑灭,因此树冠火往往成为酿成重特大森林火灾的最重要因素[1]。
应用森林灭火航弹进行森林灭火是一种全新的森林灭火方法,旨在解决目前森林消防灭火领域危害最大的树冠火扑灭问题,改变目前基层森林消防官兵手持风力灭火机在火场内部冒着生命危险与森林火灾搏斗的状况[2]。对于难以接近的森林火灾可以实现远程高效灭火,使我国远程森林消防灭火设施达到国际先进水平。
应用森林灭火航弹进行灭火的过程中,需要用直升机挂载森林灭火航弹到火场上空进行投放,本系统主要作用是保证森林灭火航弹能够在火场上空准确位置投放,使森林灭火航弹达到最佳的灭火效果。
1 智能观瞄投放控制系统总体设计
森林灭火航弹智能观瞄投放控制系统主要由3部分结构组成:上位机(工控机)、RS232-CAN转换器、下位机(CAN总线分布式通讯节点),总体结构组成如图1所示。上位机(工控机)主要是用来运行人机交互界面以及连接外部监控设备,实现森林灭火航弹智能观瞄投放控制系统的可视化操作控制,是本系统的核心组成部分。RS232-CAN转换器主要作用是在CAN总线协议和RS232协议之间进行数据转换,它的性能直接影响着系统的效率[3]。下位机(CAN总线分布式通讯节点)的主要功能是驱动执行机构进行投弹,包括多个挂接在CAN总线上面的CAN总线节点,每个CAN总线节点控制一个投弹机构,各CAN总线节点结构功能完全一致,是本系统的具体投弹执行控制部分。

图1 智能观瞄投放控制系统总体结构组成

图2 智能观瞄投放控制系统人机交互界面
2 工控机软、硬件选择设计
2.1 工控机的选择
工控机是整个控制系统的核心控制部分,需要带有触摸式控制面板,可以实现系统的可视化操作控制,主要功能是发送控制命令以及连接外部监控设备。根据功能以及使用环境,工控机需要具有控制稳定性、快速高效性、便携性等性能,采用威强铝质坚固型工业平板电脑UPC-V312-D525。
2.2 人机交互界面
本系统的人机交互界面是利用Microsoft Visual C++ 6.0软件进行编写的,Microsoft Visual C++ 6.0是一种面向对象的可视化开发工具,提供了良好的界面设计能力,它具有功能强大、简便易用和代码执行速度快等特点[4]。文中使用MSComm串口通信控件与RS232-CAN转换器进行串口通信,MSComm控件是Microsoft公司提供的串行通信编程的ActiveX控件,它为应用程序提供了通过串行接口收发数据的简便方法。MSComm控件提供了2种处理通信问题的方法:1)事件驱动方式;2)查询方式。事件驱动方式可靠性高,程序响应快,是处理串口交互作用的一种非常有效的方法,它使用OnComm事件和CommEvent属性捕捉并检查通讯事件和错误的值,发生通讯事件和错误时,将触发OnComm事件,CommEvent属性的值也将被改变,应用程序检查CommEvent属性的值并作出相应的反应,文中将采用事件驱动方式来实现串口通信[5-7]。本文所设计的人机交互界面如图2所示,人机交互界面工作流程图如图3所示。
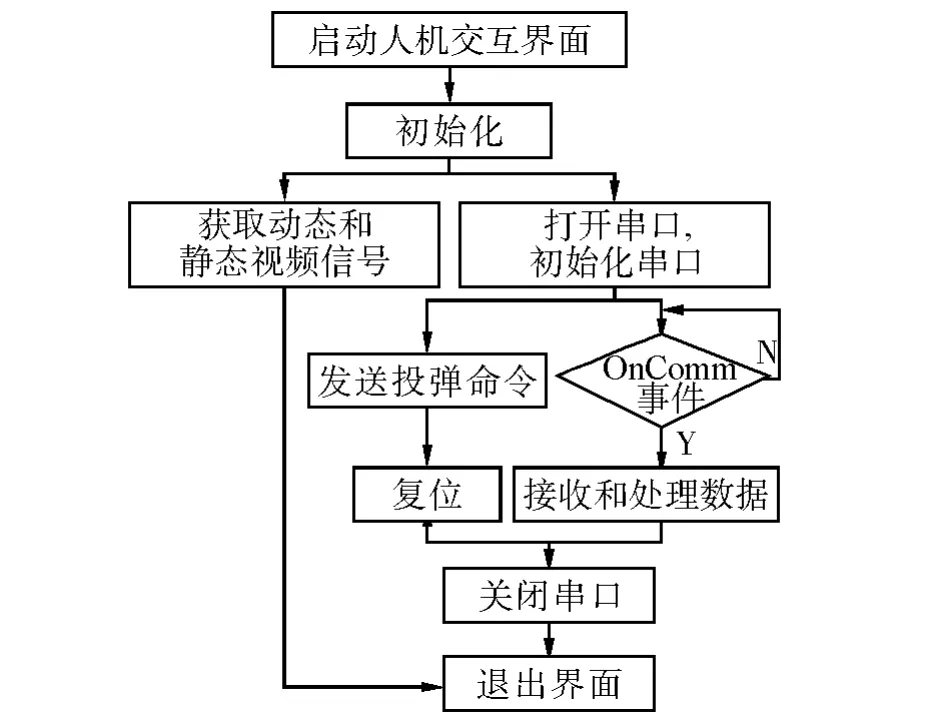
图3 人机交互界面工作流程
3 RS232-CAN转换器设计
3.1 RS232-CAN转换器硬件设计
RS232-CAN转换器硬件主要包括微处理器、CAN总线控制器、CAN总线收发器等。微处理器选择抗干扰微处理器STC89C52RC,CAN总线控制器选择飞利浦的独立CAN总线控制器SJA1000,CAN总线收发器选择广泛使用的CAN总线收发器PCA82C250,外部接口主要包括与上位机通讯的RS232串口以及与CAN总线通讯的CAN总线接口,主要硬件电路如图4所示。

图4 RS232-CAN转换器主要硬件电路
3.2 RS232-CAN转换器软件设计
整个软件控制流程如图5所示。

图5 RS232-CAN转换器软件控制流程
RS232-CAN转换器在CAN总线协议和RS232协议之间进行数据转换要使用外部中断0以及串行口中断,软件控制首先要进行微处理器初始化MCU_Init()以及CAN总线控制器初始化Peli_Init()[8-9]。
RS232-CAN转换器利用串行口中断与上位机进行通讯,当接收到上位机控制命令时,微处理器调用串行中断服务程序UART_SER (void) interrupt 4进行处理,通过CAN总线发送数据函数Peli_TXD(void)向CAN总线上写入控制命令。RS232-CAN转换器利用外部中断0与CAN总线进行通讯,当微处理器接收CAN总线通讯节点数据时调用外部中断服务程序Peli_RXD(void) interrupt 0进行处理,通过向串行口发送缓冲器SBUF写入数据将下位机发送的数据传送给上位机进行处理[10-11]。RS232-CAN转换器具体的串行中断服务程序如下:



RS232-CAN转换器在本系统中主要作用有:1)通过RS232串口接收上位机发布的控制命令,然后将控制命令经过转换通过CAN总线发送到指定的通讯节点;2)通过CAN总线接收通讯节点发送的数据,经过转换通过RS232串口发送给上位机。
4 CAN总线分布式通讯节点设计
4.1 CAN总线分布式通讯节点硬件设计
CAN总线分布式通讯节点主要包括挂接在CAN总线上面的各CAN总线节点,节点电路硬件主要包括微处理器、CAN总线控制器、CAN总线收发器、继电器等。微处理器选择抗干扰微处理器STC89C52RC;CAN总线控制器选择飞利浦的独立CAN总线控制器SJA1000;CAN总线收发器选择广泛使用的CAN总线收发器PCA82C250;继电器主要任务是执行投弹的控制命令,选择JQC-3F-C小型中功率电磁继电器。外部接口主要包括与CAN总线通讯的CAN总线接口,主要硬件电路如图6所示。

图6 CAN总线分布式通讯节点主要硬件电路
4.2 CAN总线分布式通讯节点软件设计整个软件控制流程如图7所示。

图7 CAN总线分布式通讯节点软件控制流程
CAN总线分布式通讯节点进行CAN总线通讯时使用外部中断0,软件控制首先要进行微处理器初始化MCU_Init()以及CAN总线控制器初始化Peli_Init()。CAN总线分布式通讯节点利用外部中断0与CAN总线进行通讯,当某个CAN节点微处理器接收到上位机投弹控制命令时调用外部中断服务程序Peli_RXD(void) interrupt 0进行处理,MCU通过置位相应的控制位使继电器闭合,执行投弹操作,并且将投弹成功的状态反馈给上位机。CAN总线分布式通讯节点外部中断服务程序如下:


CAN总线分布式通讯节点的主要作用是执行上位机的投弹命令并且将投弹成功的信号反馈给上位机。森林灭火航弹投弹机构核心部件是电磁铁,主要工作原理是通过电磁铁的吸合和断开实现投弹和机构复位。每个CAN总线分布式通讯节点均带有继电器,通过继电器的闭合和断开来控制电磁铁吸合和断开,从而实现投弹和复位。当相应的CAN总线分布式通讯节点接收到投弹命令时,微处理器控制继电器闭合实现投弹,并且将投弹成功的信号反馈给上位机;当相应的CAN总线分布式通讯节点接收到复位命令时,微处理器控制继电器断开实现复位,为下一次投弹做准备。
5 智能观瞄投放控制系统调试实验
智能观瞄投放控制系统调试实验主要是测试人机交互界面、RS232-CAN转换器以及CAN总线分布式控制系统之间的通讯状况,在单击人机交互界面上初始化、投弹、复位等按钮时,CAN总线分布式通讯节点能够快速做出相应的动作以及反馈数据,人机交互界面根据反馈的数据判断命令执行情况。智能观瞄投放控制系统调试实验需要1台工控机、1个RS232-CAN转换器以及2个CAN总线分布式通讯节点,工控机和RS232-CAN转换器利用1根RS232串口线进行通讯,RS232-CAN转换器和CAN总线分布式通讯节点利用CAN总线进行通讯,智能观瞄投放控制系统实验平台如图8所示。
智能观瞄投放控制系统调试实验主要测试了系统两方面的性能:1)人机交互界面显示从外部监控设备获取的视频信号;2)人机交互界面稳定可靠地与CAN总线分布式通讯节点进行通讯、数据交换以及发布命令,CAN总线分布式通讯节点可以准确地执行命令。
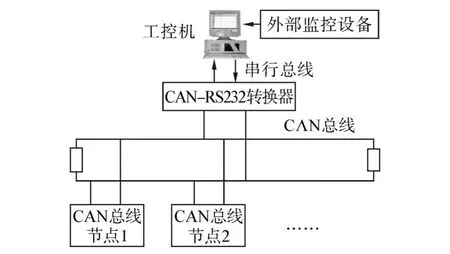
图8 智能观瞄投放控制系统实验平台
智能观瞄投放控制系统调试实验主要涉及到以上2个方面,首先完成整体系统的安装工作。当单击人机交互界面上面静态视频信号和动态视频信号时,人机交互界面上的视频框出现相应的视频信号,当单击断开信号按钮时,视频框里的视频信号消失,如图9(a)所示。然后单击人机交互界面上面初始化按钮,对整个系统进行初始化,人机交互界面上面投弹指示灯会全部变成绿色,然后单击开始投弹按钮。当单击投弹1按钮时,相应的CAN总线分布式通讯节点上面的继电器闭合,人机交互界面上的投弹指示灯会变成红色,投弹成功。当单击人机交互界面上面复位按钮时,CAN总线分布式通讯节点上的继电器全部复位。如图9(b)所示。
实验结果显示,在单击人机交互界面上功能按钮时,CAN总线分布式通讯节点都会快速准确地做出相应的动作,并且将执行命令的情况实时快速地反馈给上位机,在遇到通讯错误时,CAN总线也会出现错误指示。整个系统基本达到控制需求,能够完成投弹任务,调试实验如图9所示。
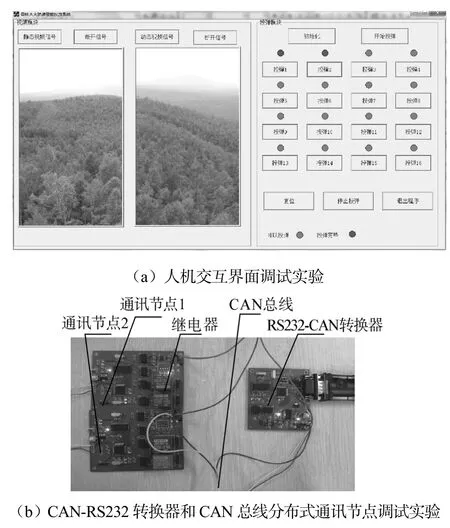
图9 智能观瞄投放控制系统调试实验
6 结束语
本文研究了一种森林灭火航弹智能观瞄投放控制系统,它可以将森林灭火航弹准确的投放到火场表面,实现森林灭火航弹投弹的智能化,解决以往森林灭火过程中资源利用率低的问题。文中将CAN总线分布式控制系统应用到了森林火灾领域,使整个控制系统具有较高的实时性、可靠性以及准确性,在发生森林火灾时,保证森林灭火航弹可以快速地投放到火场上空准确位置,大大提高森林灭火航弹的灭火效率。本文研究的森林灭火航弹智能观瞄投放控制系统中有些需要进一步研究的方向,例如投弹策略研究、投弹控制算法研究等等。
[1] 邓波. 智能森林灭火航弹研究[D]. 哈尔滨: 哈尔滨工程大学, 2010: 24-25, 33-34.
[2] 刘少刚, 刘刚, 赵丹, 等. 高层建筑气动消防炮结构研究与动力学仿真分析[J]. 哈尔滨工程大学学报, 2011,32(9): 1144-1145.
[3] 李智强, 王艳芳. 基于CAN总线的步进电动机分布式控制系统设计[J] . 微特电机, 2009(7): 29-32, 44.
[4] 汪滢, 孙华军. 基于VC++串口通信的设计与实现[J]. 现代电子技术, 2011, 7(34): 19-24.
[5] 章辉, 叶建芳, 叶建威. 基于MSComm控件串口通信的实现[J]. 电子测量技术, 2011, 8(34): 126-129.
[6] 尤路, 付永庆, 王咏胜. USB摄像头平行双目视觉系统在面积测量中的应用[J]. 应用科技, 2008, 35(2): 1-4.
[7] 吴昊天, 张燕林. 基于MSComm 控件的PC与AVR串口通信实现[J]. 算机与数字工程, 2010(4): 176-180.
[8] 李真花, 崔健. CAN总线轻松入门与实践[M]. 北京: 北京航空航天大学出版社, 2011: 60-61.
[9] 牛跃听, 周立功, 方舟. CAN总线嵌入式开发—从入门到实践[M]. 北京: 北京航空航天大学出版社, 2012: 59-104.
[10] 汪瞳, 刘玉明, 杨楚平, 等. CAN总线协议实现方法研究[J]. 应用科技, 2007, 34(7): 56-57.
[11] MATTHEW D. CAN Bus technology enables advanced machinery management[J]. Engineering and Technology for Sustainable World, 2012, 19(5): 10-11.
Design on the intelligent view glance control system of the aerial bomb for forest fire fighting
LIU Shaogang1, ZHOU Zhao1, ZHANG Shuyu2, ZHAO Dan1, GUO Yunlong1, LI Xiaowei1
1. College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China 2. Harbin No.1 Machine Manufacturing Group Co., Ltd, Machinery Branch, Harbin 150056, China
The purpose of this paper is to develop an intelligent view glance control system of the forest fire bomb to improve fire extinguishing efficiency. In this paper, taking industrial computer as the core of control system, through the RS232-CAN converter to release control commands to the CAN bus distributed communication node and receive feedback data real-timely, realize the efficient, real-time and reliable operation of the intelligent view glance control system of the forest fire bomb. This paper describes the hardware constitution and software implementation process of the control system, and conducts the debugging experiment on the related function testing of the control system. The experimental results show that the intelligent view glance control system of the forest fire bomb can work properly, and complete the corresponding control functions.
aerial bomb for forest fire fighting; intelligent view glance; CAN bus; distributed communication node; human-computer interaction interface; control system
TP368.1
A
1009-671X(2014)01-0069-06
10.3969/j.issn.1009-671X.201301004
2013-01-06.
哈尔滨市应用技术研究与开发项目(2013RFXXJ002);高等学校博士学科点专项科研基金资助项目(20102304110007).
刘少刚(1962-), 男,教授,博士生导师.
刘少刚, E-mail: liushaogang@hrbeu.edu.cn.
