ADSP-BF548在相关测速声呐系统上的应用
2014-05-11曹松军陈龙汪玉玲邱薇王长红
曹松军,陈龙,汪玉玲,邱薇,王长红
ADSP-BF548在相关测速声呐系统上的应用
曹松军1,2,陈龙1,汪玉玲1,邱薇1,王长红1
(1. 中国科学院声学研究所,北京 100190;2.中国科学院大学,北京 100190)
相关测速声呐是一种适用于水面航行的船舶或者水下航行的潜器的设备,主要用于获取载体速度信息、流速和海深,与惯导联合可用于载体的导航定位。相关测速声呐基于“波形不变性”原理,通过理论时空相关函数和数据时空相关函数的最小二乘拟合获取载体速度。构建了一套新的基于ADSP-BF548平台的软件控制系统。新系统实现了网络、串口、CAN等通信方式;完成了基于FatFs R0.08b文件系统的数据存储功能;动态电源管理可以减小系统功耗,在电池供电时能延长有效工作时间。从系统通信、数据存储、电源管理、系统工作等方面对新平台软件系统的特点进行了介绍。
相关测速声呐;ADSP;软件系统设计
0 引言
相关测速声呐是基于“波形不变性”原理[1]的测速和测深设备。相关测速相比于多普勒测速,具有以下优点[2,3]:(1) 相关测速声呐测速与声速无关,无需进行声速修正;(2) 相关测速声呐较多普勒测速声呐受载体姿态的影响小;(3) 相关测速声呐垂直向下发射,功率小,利于隐蔽;(4) 相关测速声呐工作频率相对较低,适用于大深度海底。基于以上特点,相关测速声呐在远洋船舶和水下潜器的使用方面,具有得天独厚的优势。中国科学院声学研究所研发相关测速声呐设备[4]十几年,产出了多种不同型号的设备。本文实现了其在ADSP-BF548[5]平台的应用。
1 ADSP-BF548简介
ADSP-BF548是ADI公司出品的blackfin系列低功耗处理器,广泛应用于各种低功耗移动数字平台。BF548的最高运行时钟为600 MHz,可软件配置运行时钟频率,支持各种低功耗运行模式,以适应不同功耗要求。BF548具有丰富的外部接口,大部分引脚都具有复用功能,既可配置成IO口,也可配置成专用功能接口。内部集成11个计数器,4个UART接口,支持内外存之间的DMA数据传输,还集成了低功耗mobile DDR SDRAM控制接口。
2 系统工作
2.1 通信模块
相关测速声呐在工作的过程中,需要实现以下的通信过程[6](见图1):与调试计算机通信,接收计算机的命令和参数;与姿态传感器的通信,获取实时姿态信息,用于速度计算;与声多普勒计程仪(ADL)通信,实现组合测速工作模式,为惯导系统提供全海深的速度信息;实时工作过程中与上位机的通信,实时传回工作结果。

图1 相关测速声呐系统通信示意图
BF548控制板使用W5300芯片,以完成控制板与调试计算机之间的网络通信,W5300内部集成了10/100M以太网控制器以及MAC和TCP/IP协议栈。通信过程中使用TCP协议,主控制板作为客户端,调试计算机的superlog软件作为服务器端(见图2)。调试计算机通过superlog软件给主控制板发送相关命令,如设置工作参数、进入ADIO系统、数据回放、Flash擦除等。
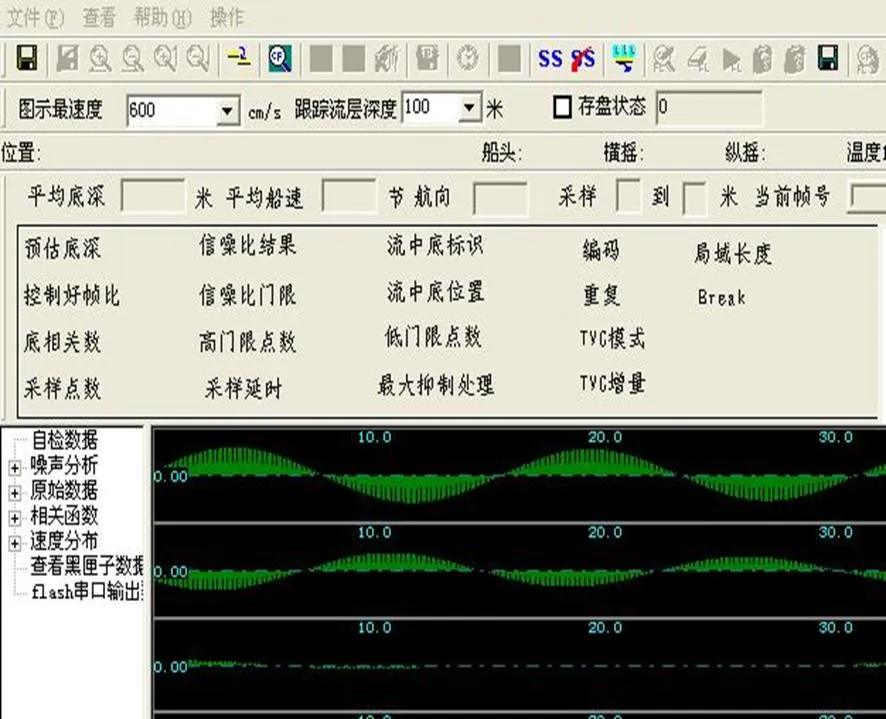
图2 TCP通信服务器端-superlog
BF548具有4个UART接口,使用UART0与姿态传感器通信,使用UART3与ADL通信,串口发射程序使用查询方式,接收子程序使用中断方式,发射接收子程序见图3。
控制器局域网(CAN)[7]是一种有效支持分布式控制系统的串行通信网络,在自治水下潜器(AUV)的通信设计方面得到广泛应用。CAN协议引入了数据的CRC校验,使其具有突出的可靠性,可以保证船舶和潜器准确地获取航行速度和水域底深。

图3 串口发射和接收子程序
BF548控制板具有CAN控制器模块,可以实现控制板与上位机的CAN通信。CAN模块遵从CAN2.0B标准,最大支持1 Mbps的数据传输率。声呐通信使用标准数据帧,通信协议见表1。

表1 CAN总线标准ID格式
表1中:
(1) ID10为0代表主从通信方式,为1代表广播方式。
(2) ID8~ID5为从节点地址,即声相关计程仪地址,设为1。
(3) ID4~ID0为数据内容模式,上位机发送给声相关计程仪的数据帧包括工作指令包(数据内容模式为0)、参数配置包(数据内容模式为1)、时间参数包(数据内容模式为2),声相关计程仪发送给上位机总共8类数据帧(数据内容模式从0到7),具体数据帧内容模式的含义见表2。

表2 CAN总线数据内容模式含义
2.2 存储模块
相关测速声呐在工作过程中需要存储相关工作参数和结果,包括AD采样数据、实时速度信息等。使用NANDFLASH存储数据,需记录工作过程中产生的坏块信息,而且读取速度较慢。BF548控制板的SD存储卡增加数据存储的便捷性。
设备中SD卡基于FatFs R0.08b文件系统(见图4)。SD卡存储文件系统[8]分为三部分:SD卡底层驱动,FatFs文件系统和应用层函数。(1) 底层驱动系统使用了DMA通道实现数据的读取和写入,具有单块(一块大小为512字节)读写和多块读写两种方式,使用TIME0实现了日历系统,为文件系统提供准确的时间信息;(2) FatFs文件系统采用了开源文件系统FatFs R0.08b;(3) 应用层函数,实现了FatFs_Read()和FatFs_Wrie()两个函数,实现对实时处理结果的储存和回放功能。

图4 SD卡文件系统结构图
2.3 动态电源管理
BF548控制板具有四种不同的运行方式:全速、激活、休眠和深度休眠。通过外部电源管理控制器能够操纵DSP的内部电压,从而减小功耗。当潜器浮出水面航行或者在水下待命状态时,可以软件切换声呐的工作模式,使其处于深度休眠状态,关闭核心时钟和系统时钟,保留RTC时钟信息,可在一定程度上减少功耗,增加设备在水底的工作时间。
2.4 工作类型
相关测速声呐的主要工作目标是测量流速剖面和底跟踪测量载体速度,其工作类型主要分为底搜索、底跟踪测速、流层跟踪测速、流速剖面测量。另外,为了对系统性能进行考核,还有自检和噪声分析等任务[9]。图5给出了软件系统的整体工作流程图。

图5 系统工作流程图
3 测试结果
系统首先进行仿真测试。测试过程中使用串口调试助手CommAssistant、CANalyst软件对系统的通信功能加以测试,使用8GTF卡对数据存储进行测试,测试流程如图6所示。使用CommAssistant串口调试助手代表ADL,每秒钟向控制主板发送四组串口数据,同时接收控制主板的参数配置包和开始停止工作命令;控制主板接收到串口发过来的数据包,首先存储在主板的TF存储卡上,然后经由CAN总线发送给CANalyst;使用CANalyst代表上位机,给控制主板发送启动信息包和参数配置包,同时接收和显示控制主板发送过来的数据包,仿真测试结果如图7所示。经过长时间(大于72 h)的测试,收发数据正常,保存信息完整正确。
在仿真测试以后,控制软件与某潜器的上位机和ADL设备进行了联合调试,各种通信功能良好,数据存储完整。

图6 仿真测试流程

图7 仿真测试结果
4 结论
本文对相关测速声呐软件控制系统在ADSP- BF548平台上面的应用进行了介绍。新平台丰富了声呐工作的功能,使之更好地与主控电脑之间交互,在工作效率和系统健壮性方面得到一定程度的提升。
[1] 朱维庆, 冯雷, 王长红, 等. 声相关流体速度测量理论和信号处理方法[J]. 声学学报, 2007, 32(2): 144-150.
ZHU Weiqing, FENG Lei, WANG Changhong. Theory and signal processing of acoustic correlation techniques for current velocity measurement[J]. Acta Acustica, 2007, 32(2): 144-150.
[2] Bradley S E, Deines K L. Acoustic correlation current profiler [J]. IEEE Journal of Oceanic Engineering(S0364-9059), 1991, 16(4): 408-414.
[3] Bradley S E, Kuo S Y. Long Range Acoustic Correlation Current Profiler[C]// Proceedings of IEEE conference Oceans' 92, 1992: 648-653.
[4] 王长红, 邱薇, 汪玉玲, 等. 大深度声相关流速剖面仪样机研制 [J]. 声学技术, 2002, 21: 421-422.
WANG Changhong, QIU Wei, WANG Yuling. Development of long range acoustic correlation current profiler(ACCP)[J]. Technical Acoustics, 2002, 21: 421-422.
[5] Analog Devices, Inc. ADSP-BF54x Blackfin processor hardware reference [EB/OL].
[6] 易卉芹, 邱薇, 陈龙, 等. 相关测速声呐软硬件系统设计[J]. 微计算机应用, 2011, 32(8): 43-46.
YI Huiqin, QIU Wei, CHEN Long, et al. The hardware and software design of correlation sonar system[J]. Microcomputer Application, 2011, 32(8): 43-46.
[7] 徐袭, 石敏. 无人水下航行器控制系统CAN总线通信设计与仿真研究[J]. 舰船电子工程, 2012, 32(9): 98-100.
XU Xi, SHI Min. Study on design and simulation of CAN bus commuciation for unmanned underwater vehicle control system[J]. Ship Electronic Engineering, 2012, 32(9): 98-100.
[8] 李世奇, 董浩斌, 李荣生. 基于FatFs文件系统的SD卡存储器设计[J]. 测控技术, 2011, 30(12): 79-81.
LI Shiqi, DONG Haobin, LI Rongsheng. Design of SD memory card based on FatFs file system[J]. Measurement & Control Technology, 2011, 30(12): 79-81.
[9] 冯雷, 王长红, 汪玉玲, 等. 相关测速声呐工作原理及海试验证 [J]. 声学技术, 2005, 24(2): 70-75.
FENG Lei, WANG Changhong, WANG Yuling, et al. Velocity measurement with correlation sonar and sea test verification[J]. Technical Acoustics, 2005, 24(2): 70-75.
An ADSP-BF548 based correlation sonar system
CAO Song-jun1,2, CHEN Long1, WANG Yu-ling1, QIU Wei1, WANG Chang-hong1
(1. Institute of Acoustics, Chinese Academy of Sciences, Beijing 100190, China; 2. University of Chinese Academy of Sciences, Beijing 100190, China)
Correlation Sonar is usually used on the boat or the UUV for obtaining the velocity of vessel, current velocities and the depth of water. With the help of INS, it can help the vessel to locate its position and sail on the right direction. Correlation Sonar works on the principle of ‘waveform invariance’ and obtains the velocity of vessel by least-square fitting the theoretical correlation function and the data correlation function. In this paper, a new software control system is established on the platform of BF548. The new system has some communication modes, including TCP, UART, CAN. A file system based on FatFs R0.08b is built for storing data. The dynamic power system is used to reduce power consumption, which can help system to increase working time in using battery. The new system is introduced in the following aspects: system communication, data storage, power management and working process.
correlation sonar; ADSP;software design
TB556
A
1000-3630(2014)-06-0544-04
10.3969/j.issn1000-3630.2014.06.013
2013-09-05;
2014-01-14
国家863计划资助项目(2006AA09A313)。
曹松军(1990-), 男, 山东人, 硕士生, 研究方向为信号与信息处理。
王长红, E-mail: wangch@mail.ioa.ac.cn
