三元阵被动测距在浅海低频条件下的声速修正
2014-05-11陈艳丽宫在晓郭良浩章伟裕
陈艳丽,宫在晓,郭良浩,章伟裕
三元阵被动测距在浅海低频条件下的声速修正
陈艳丽1,2,宫在晓1,郭良浩1,章伟裕1,2
(1. 中国科学院声学研究所声场声信息国家重点实验室,北京 100080;2. 中国科学院大学,北京 100080)
声速是三点被动测距方法中影响距离解算精度的重要参数,当声呐系统的工作频率较高时,一般直接使用海水声速。但随着远距离探测声呐技术的发展,声呐工作频率越来越低。浅海波导中传播的低频声信号的相速度和群速度明显不同于海水声速,选取哪个声速项用于距离解算是一个值得研究的问题。通过理论分析与pekeris波导中的数值仿真,确定了三点被动测距解算公式中的速度项应为相速度。仿真结果表明选用简正波相速度用于距离解算能有效降低浅海低频时三点被动测距方法的误差。
低频声场;浅海波导;三点被动测距;声速选取
0 引言
为提高被动三元阵的测距[1-3]精度,国内外学者对时延测量误差和安装精度误差进行了深入研究,但对于速度参数的选取问题却鲜有问津。之前的应用中由于声呐工作频段较高,距离解算的速度项一般取海水声速。目前随着声呐技术的发展和远距离探测的需要,低频化已成为声呐发展的方向。频率降低后,浅海波导声传播中简正波的相速度、群速度与海水声速的差异将变大[4],此时三点测距方法中声速选取是否准确对距离解算会有较大影响,故有必要对低频浅海声场中三点测距方法声速的选取进行研究。
本文通过理论分析和pekeris波导中的数值仿真得出三点被动测距距离解算公式中速度项应为相速度。
1 三点测距模型

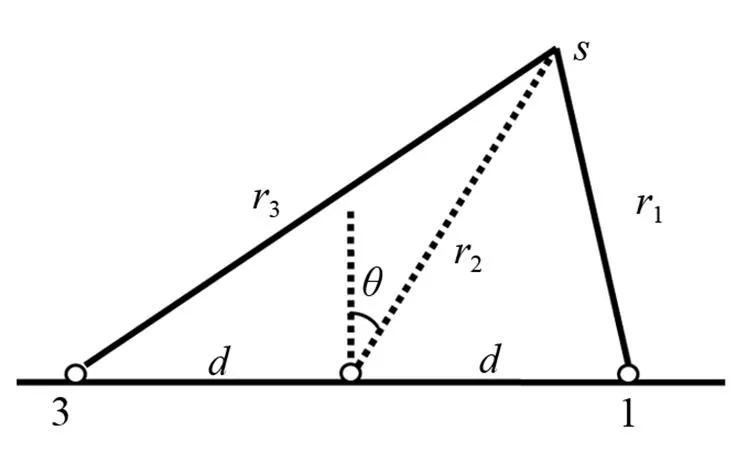
图1 三元阵被动测距模型



公式(4)表明,基阵安装精度、时延估计和声速参数都对测距结果有影响。理论上,声速项相对误差与测距相对误差有如下关系:
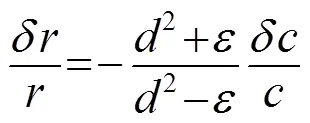
由式(5)可知,声速的正确选取对精确测距有着重要影响。之前对三点测距性能改进的研究,内容多集中于基阵安装和时延估计[1]方面,关于声速选取的研究甚少。宫在晓等人对简正波声场中测向方法应选取的声速进行了修正[5],本文则对低频浅海声场时三元阵被动测距最佳声速(参考声速)的选取进行研究。
2 理论分析


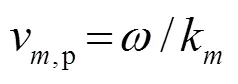
各阶简正波的相速度和群速度分别为



分析式(10)可知,在相关函数最大值处有

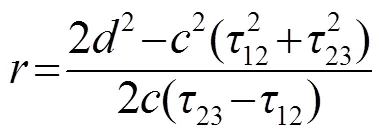
三点测距公式使用时,一般采用广义互相法得到相邻阵元接收信号的时延差,由式(1)、(2)、(3)可得:



3 数值仿真
仿真环境为Pekeris波导,海深100 m,海水声速1500 m/s、密度1.0 g/cm3,海底声速1600 m/s、密度1.85 g/cm3。用KRAKEN声场计算程序[6]产生仿真所用的数据,仿真分为两部分,第一部分按理论分析的思路进行声速选取的验证;第二部分进行三点测距仿真,探究声速选取带来的测距误差。
3.1 声速选取验证

窄带声信号的频段分别为20~30 Hz、30~50 Hz和50~100 Hz时,其激发的简正波相速度及处理得到的参考声速分别如图2~7所示。

图2 20~30 Hz频段简正波相速度

图3 20~30 Hz频段参考声速

图4 30~50 Hz频段简正波相速度

图5 30~50 Hz频段参考声速

图6 50~100 Hz频段简正波相速度

图7 50~100 Hz频段参考声速
将图2和图3、图4和图5、图6和图7进行对比,可以看出参考声速并非海水声速1500 m/s,而是与声源激发的简正波相速度范围一致。
同时,不同频率的参考声速也有较大差异,如图3、5、7所示,当信号仅激发一阶简正波时,参考声速在不同距离上数值稳定;但信号激发简正波多于一阶时,参考声速出现震荡,且震荡随简正波阶数增多而加剧。通过程序参数设定使30~50 Hz、50~100 Hz激发信号中只含单阶简正波,重复上述仿真,得到的参考声速无震荡且在各自对应阶简正波的相速度范围之内,说明不同阶简正波之间的干涉引起了参考声速的震荡。
3.2 三点测距仿真



图8 20~30 Hz频段0°方向测距误差

图9 30~50 Hz频段0°方向测距误差

图10 50~100 Hz频段0°方向测距误差
4 结论
理论分析和Pekeris波导中的数值仿真表明:在低频浅海声场条件下,为减小测距误差,三点测距方法应采用的声速并非是海水声速,而应是简正波相速度。本文所讨论的结果对低频三点测距方法具有一定的指导价值,但后续还需进一步开展参考声速自适应选取研究和实验数据验证等工作。
[1] 田坦. 声呐技术[M]. 哈尔滨: 哈尔滨工程大学出版社, 2000: 137-147.
TIAN Tan. Sonar technology[M]. Harbin: Harbin Engineering University Press, 2000: 137- 147.
[2] KnappCH,CaterGC. The generalized correlation method for estimation of time delay [J].IEEE Trans on Signal Processing, 1976, 24(04): 320-327.
[3] 姚蓝. 广义互相关时延估计的一种推广应用[J].中国造船, 1992 (2): 99-108.
YAO Lan. An extended application of the generalized correlation method for the estimation of time delay[J]. Shipbuilding of China, 1992(2): 99-108.
[4] Jensen F B, Kuperman W A, Porter M B, et al. Computational Ocean Acoustics[M]. 张润中 等译. 中国船舶重工集团公司: 第七研究院第七一五研究所, 2000.
[5] 宫在晓. 浅海声传播相速度对测向精度的影响[J]. 声学学报, 2002, 27(6): 492-496.
GONG Zaixiao. The effect of acoustic wave’s phase speed on preciseness of DOA estimation in shallow water[J]. Acta Acustica, 2002, 27(6): 492-496.
[6] Porter M B. The KRAKEN normal mode program[Z]. SACLANT Undersea Research Center, Technical Report SM 245, 1991.
The correction of velocity parameter for passive ranging of three-element array at low frequency in shallow water
CHEN Yan-li1,2, GONG Zai-xiao1, GUO Liang- hao1, ZHANG Wei-yu1,2
(1. State Key Laboratory of Acoustics, Chinese Academy of Sciences, Beijing 100080, China; 2. University of Chinese Academy of Sciences, Beijing 100080, China)
The velocity parameter is an important parameter for the passive ranging of three-element array. When the sonar works at high frequency, the velocity parameter is usually set as the sound speed of water. With the sonar technology developing for the long range detection, sonar frequency is becoming much lower. Phase velocity and group velocity of low-frequency sound in shallow water are completely different from the sound speed of water. So, it is important for getting a higher ranging accuracy to determine which velocity should be chosen for passive ranging of three-element array. Theoretical analysis and simulation results in Pekeris waveguide show that the phase velocity should be used for passive ranging of three-element array at low frequency in shallow water, and it could improve the ranging accuracy effectively.
low-frequency sound field; shallow-water wave guide; passive ranging of three-element array; sound speed
TN011.6
A
1000-3630(2014)-06-0485-04
10.3969/j.issn1000-3630.2014.06.001
2014-01-13;
2014-04-17
国家自然科学基金资助项目(11074269, 11174312)。
陈艳丽(1988-), 女, 河南洛阳人, 博士研究生, 研究方向为水声 信号处理。
陈艳丽, E-mail: chenyanli@mail.ioa.ac.cn
