基于TMS320F28335的单极性SPWM的实现
2014-05-11薛士龙
李 帆,薛士龙,耿 攀,蒋 晨
(上海海事大学 物流工程学院,上海201306)
0 引 言
逆变器作为DC-AC装置有着广泛的用途,它可用于各类交通工具,如汽车、各类舰船以及飞行器。在太阳能及风能发电领域,逆变器是将这些能源变成电能的关键设备。SPWM(正弦脉宽调制)技术是逆变器核心技术之一,按驱动方式可以分为双极性和单极性SPWM。
随着数字控制技术的高速发展,高性能的DSP芯片已经成为逆变器的主流控制器。TMS320F28335是美国TI公司推出的面向工业控制的32位浮点DSP。本文采用Ti公司最新推出的TMS320F28335DSP芯片,完成了单极性SPWM实现,并在逆变器上验证了程序的可靠性。
1 TMS320F28335的EPWM模块
TMS320F28335内置6路加强型正弦脉宽调制(EPWM)模块,该模块包含时间基准、计数比较、动作限定、死区控制、PWM斩波、错误控制、事件触发等7个子模块,通过配置不同子模块内部的寄存器控制SPWM波形输出[1]。并且它是一款浮点型DSP,可直接参与浮点型数据的运算,在编程时无需加入IQmath算法就可以实现SPWM波的生成。与其他芯片相比,F28335的EPWM 模块功能更加完善,每路(EPWMxA和EPWMxB)可生成相互独立的控制脉冲,均可以独立编程。
在ePWM模块中有一个动作限定子模块(AQC),它在波形产生中起到重要作用,它决定输出波形的高低电平,从而使ePWMxA和ePWMxB输出所需要的开关波形。动作限定子模块主要实现的功能有:
(1)基于以下事件限制并产生相应操作
时间基准计数器等于周期(TBCTR=TBPRD);
时间基准计数器等于0(TBCTR=0x0000);
时间基准计数器等于有效计数比较寄存器A值(TBCTR=CMPA);
时间基准计数器等于有效计数比较寄存器B值(TBCTR=CMPB)。
(2)当事件发生时,管理产生事件的极性(如图1)
与其他系列的DSP芯片相比(比如TMS320F2812),F28335的ePWM模块中的死区模块具有易于配置、可操作性强等突出优点[2]。死区模块主要有以下功能:
a.每一路ePWMxA/B输入信号经过死区模块后都可以产生适当的带有死区的匹配信号ePWMxA和ePWMxB。

图1 EPWMxA/B以CMPA为事件基准的输出波形
b.死区模块可以设计匹配信号的属性。匹配信号有高有效、低有效、高有效补偿和低有效补偿四种。
c.可以分别设置死区的上升沿延迟和下降沿延迟。
通过设置死区的输入\输出模式和极性模式,可以产生多个组合方式,但是并不是所有的组合都是典型的应用模式。典型的死区设置如图2所示。

图2 典型死区模式的波形
2 基于TMS320F28335的单极性调制方式的设计
2.1 单极性调制方式
单相全桥逆变电路的拓扑如图3所示,全桥逆变器的控制方式一般可分为双极性和单极性两种。与前者比较,后者具有损耗低、电磁干扰小、开关谐波小等优点。文献[3]中介绍了在工程实践中,单极性逆变桥路的四种驱动方式,并将其归纳为单臂斩波驱动和双臂斩波驱动两大类,每一类还可分为不带同臂互补和带同臂互补。

图3 单相全桥逆变拓扑
单臂斩波驱动是指在每个周期内,只有一个桥臂的开关管高频工作,另一桥臂工作在工频。单臂斩波驱动工作方式如下:桥臂1的上下两个开关管S1和S4在高频工作;桥臂2的上下开关管S2和S3在工频工作。在调制波的正半周期,S3常闭,S1高频工作;在调制波的负半周期,S2常闭,S4高频调制。
连续作业桩支护也可以称为地下连续墙技术,该支护手段成本投入较大,所以仅适用于规模较大的工程类型,一些中小型地下作业则应用频率较低。在开展地下连续作业之前,技术人员要针对周边环境、地质、气候进行大量勘查,确保周边自然环境、人工建筑、生态气候不会对工程建设造成不良影响,这个过程执行时需要耗费较长时间,而且对人力资源的综合素质与专业能力的要求相对较高。但是对于适用的工程来说,该技术可用效果良好,能有效阻挡地下水、砂石等问题对整体工程质量造成的影响,未来发展过程中,技术人员可以针对其优势,开发新型建筑材料,在减少其成本投入的基础上,拓宽其应用范围,保证为我国建筑行业提供更加全面的服务。
同臂互补是指在正半周期,桥臂1的下臂S4原本是常开的,同臂互补以后,受到同臂另一开关管S1的互补信号的控制;同样,在负半周期,桥臂1的上臂S1原本是常开的,同臂互补后,受到同臂另一开关管S4的互补信号的控制。图4为单臂斩波驱动的时序图。

图4 单极性单臂斩波驱动波形的时序图
双臂斩波驱动是指在每个周期内,两个桥臂均有开关管高频工作。双臂斩波驱动工作方式下:桥臂1的上开关管S1和桥臂2的上开关管S2高频工作,下开关管S4和S3工作在工频。在调制波的正半周期,S3常闭,S1高频工作;在调制波的负半周期,S4常闭,S2高频调制。它的同臂互补是指在正半周期,桥臂1的下臂S4原本是常开的,同臂互补以后,受到同臂另一开关管S1的互补信号的控制;同样,在负半周期,桥臂2的下臂S3原本是常开的,同臂互补后,受到同臂另一开关管S2的互补信号的控制。图5为双臂斩波驱动的时序图。
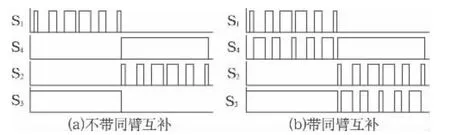
图5 单极性双臂斩波驱动波形的时序图
综上所述,不带同臂互补的驱动方式是上桥臂开通时,电流通过上桥臂开关管;关断时,通过下桥臂二极管实现续流。加入同臂互补以后,即在上桥臂关断以后,通过下桥臂的开关管实现续流。
2.2 程序设计
生成SPWM波的关键在于控制周期值(TBPRD)及占空比,按照正弦规律变化生成占空比脉冲序列。通过时间基准子模块为EPWM模块提供基准时钟,并通过设定计数周期和计数模式实现对三角载波信号的模拟。计数比较子模块周期性,更新比较寄存器(CMPA,CMPB)数值,并通过动作限定子模块,在定时器计数产生比较中断或周期中断控制对应引脚上的电平变化;当比较寄存器的值按正弦规律变化时,即可输出按正弦规律变化的脉宽信号。通过查表法,先将占空比的数字预先存于表中,通过中断子程序调取正弦表,更改比较寄存器中的数据,获取SPWM脉冲序列。
以同臂互补的双臂斩波驱动为例,EPWM1和EPWM2的时间基准控制寄存器(TBCTL)选择递增递减的计数模式,实现对三角波的模拟,那么载波周期为:

式中,TBCLK为时基时钟,本文中TBCLK为150 MHz,TBPRD为3 750 s,那么载波频率为20 kHz。为了使调制波频率为50 Hz,正弦波中要包含400个点。

表1 EPWM模块管脚的设置

负半周期比较寄存器值为:

式中,M为调制度;table为正弦表值。
整个程序由主程序和周期中断程序组成。主程序用于DSP系统的初始化,中断程序用于更新比较寄存器的值。图6为周期中断的流程图。

图6 周期中断流程图
3 实验验证
根据文中的程序设计方法完成DSP程序的编写,程序调试无误后烧写到DSP芯片中。图7、8分别为仿真波形和实测DSP输出的波形。从图中可知,PWM波形的占空比是按正弦规律实时变化的,周期频率为50 Hz,与程序设定一致。
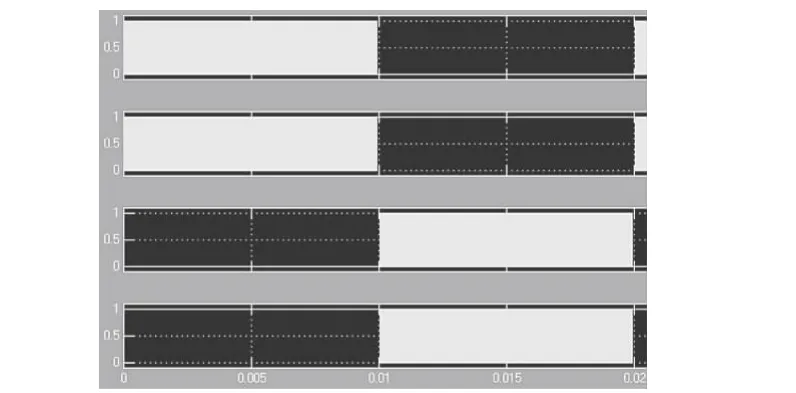
图7 Simulink仿真波形

图8 DSP输出波形
每一路EPWM模块中的比较寄存器(CMPA、CMPB)的初始值都设为0,在中断函数里正半周期比较寄存器值为:
用这套程序在逆变器系统中进行验证,图9为逆变器输出波形,输出为50 Hz正弦波,与程序设定的一致。

图9 逆变器输出波形
4 结 论
本文利用了DSP28335完成了单极性SPWM的实现,程序编程简单、易于修改。在实验中,逆变器运行良好,输出的电压频率幅值误差都在允许范围内,验证了本文设计方法的正确性。
[1]周雪松.基于TMS320F28335 DSP的三电平逆变器[J].电子电子技术,2009,4:21-23.
[2]Texas Instruments.TMS320x28xx,28xxxEnhanced Pulse Width Modu-lator(ePWM)Modle[Z].2007.
[3]潘文诚.单极性SPWM逆变桥驱动方式研究[J].浙江科技学院学报,2012,24(3):201-204.
[4]毛惠丰,陈增禄.SPWM 数字化自然采样法的理论及脉冲误差分析[J].中国电机工程学报,2006,26(9):131-136.
[5]PONGIANNAN R K,PARAMASIVAM S,YADAIAHN.Dynamically reconfigurable PWM controller for three-phase voltage-source inverters[J].IEEE Transactions on Power Electronics,2011,26(6):1790-1799.
[6]王 鑫.三相SPWM波在TMS320F28335中的实现[J].电子设计工程,2013,21(2):176-178.
