Tracking Control of Leader-follower Multi-agent Systems Subject to Actuator Saturation
2014-05-08AirongWeiXiaomingHuYuzhenWang
Airong WeiXiaoming HuYuzhen Wang
I.INTRODUCTION
ACTUATORsaturation is one of the most common and important nonlinearities existing in practical control systems since the capability of any physical actuator is limited.If its adverse effect is neglected,actuator saturation can not only result in performance degradation of the closed-loop system,but also become the source of instability.For this reason,considerable attention has been paid to control systems with actuator saturation since 1950s and many signi ficant results have been proposed in the last decade[1−8].
It is well-known that if a linear system is asymptotically null controllable with bounded controls(ANCBC),low-gain feedback is an effective methodology that can be used to achieve semi-global results[2,9−10].Low-gain feedback refers to a family of stabilizing state feedback gains,parameterized in a scalar,which tends to zero as the parameter approaches zero.Based on low-gain feedback design,an enhanced design method,referred to as the low-and-high-gain feedback depending on the low-gain parameterεand the high-gain parameterρ,was also developed in[9,11]to achieve closedloop performances beyond large stability region,including robust semi-global stabilization and disturbance rejection.
In recent years,research on behaviors of multi-agent systems has received extensive attention,mainly due to its applications in the formation control of unmanned air vehicles,the cooperative control of mobile robots,the design of distributed sensor networks,and so on[12−14].In collective behaviors of multiple agents,the leader-follower problem is one of the important coordination problems in the studies of mobile agents,where the leader may be a real leader(such as a target,an evader,and a pre-defined position),or a virtual leader(such as a reference trajectory or a specified path).The leader has the desired trajectory or target,which can help guide the whole group.The other agents follow the leader using the relative information obtained from their neighbors and the leader.This is also known as cooperative tracking control[15],synchronization to a leader,pining control[16],or model reference consensus[17].
In literature,much attention has been paid to the leader follower problem of first-order or second-order integrator dynamics[15,18−19].For example,Jadbabaie et al.[18]demonstrated that a simple neighbor rule makes all agents eventually move in the same direction despite the absence of centralized coordination and each agent′s set of neighbors changing with time as the system evolves under a joint connection condition.In[19],to reach a consensus,the connectivity keeping problem was considered by computing the ratio of the numbers of leaders and followers.In practice,some state variables of agents(or even their leaders)may not be measured.In this case,decentralized observer design is needed for each agent.Hong et al.[15]proposed a neighbor-based observer to estimate the unmeasurable variables(velocity)of an active leader.Moreover,they extended the result to the second-order case[20].
Despite much work in these two areas,little attention except[21−24]has been paid to multi-agent systems with constraints.In practice,general linear multi-agent systems are more interesting,and include the integrator dynamics(of any order)as a special case.However,there are few results except[23−25]on this kind of multi-agent systems,since it is not an easy work to study such systems.Particularly,there are,to our best knowledge,fewer results based on parametric algebraic Ricatti equations for general linear ANCBC multiagent systems subject to actuator saturation.
The objective of this paper is to investigate the tracking problem of leader-follower multi-agent systems subject to actuator saturation.For ANCBC agents,a new family of scheduled low-and-high-gain feedback controllers are constructed to achieve semi-global leader-following consensus by tuning related parameters.Such control laws rely on the asymptotical property of a class of parametric algebraic Ricatti equations.The dynamics of each agent studied can be of any order,the communication topology within the multi-agent systems is fixed and represented by an undirected graph.We show that if the associated undirected graph of the system is connected,with the proposed control law,all the followers can semi-globally track the leader eventually.An illustrative example with simulations shows that low-and-high-gain-based method as well as control protocols is effective for the tracking problem of the leader-follower multi-agent systems with actuator saturation.
The remainder of this paper is organized as follows.Section II provides necessary preliminaries and problem formulation.Section III presents the main results of this paper.An example is given in Section IV to verify the theoretical analysis,which is followed by the conclusion in Section V.
II.PRELIMINARIES
A.Notations
Some mathematical notations are used throughout this paper.Rndenotes then-dimensional Euclidean space.Fory=(y1,y2,···,yn)T∈Rn,‖y‖∞=max{|yi|,1≤i≤n},and‖·‖represents the Eulidean norm.sign(·)stands for the symbol function.LetIn∈Rn×nbe the identity matrix.1n∈Rnis the vector with all entries being one,and 0 denotes a zero value or a zero matrix with appropriate dimension.In a symmetric matrix,the symbol“∗”is used to denote the term that is induced by symmetry.Wherever the dimensions of the matrices are not mentioned,they are assumed to be of compatible dimensions.A=[aij]is a matrix withaijbeing the entry ofi-th row andj-th column,A=diag{ai}is a diagonal matrix with diagonal entriesai,andATis the transpose of matrix A.tr(W)denotes the trace ofW,and Kronecker product is denoted by“⊗”.
B.Graph Theory
We use a graph to represent the communication topology among agents.An undirected graphG=(V,E,A)of orderNconsists of a vertex setV={1,2,···,N},an edge setE=(i,j):i,j∈V×Vand a weighted adjacency matrixA=[aij]∈RN×N,whereaii=0,andaij=aji≥0.aij>0 if and only if there is an edge between vertexiand vertexjand the two vertices are called adjacent(or they are mutual neighbors).The set of neighbors of vertexiis denoted byNi={j∈V:(i,j)∈E,j/=i}.
A path of lengthlfrom vertexvito vertexvjis a sequence ofl+1 distinct vertices starting fromviand ending atvjsuch that the consecutive vertices are adjacent.For an undirected graphG,if there is a path between any two vertices,thenGis called connected,otherwise,disconnected.For the leader following system,we consider another graphassociated with the system consisting ofnagents(which are called followers)and one leader denoted byxl.
Throughout this paper,we assume that the graph is unweighted,that is,Ais a 0-1 matrix.Let|Ni|be the cardinality of the setNi,and define the LaplacianLcorresponding to the undirected graphGas

By the definition,for an undirected graph,Lis symmetric and every row sum of it is zero.0 is an eigenvalue ofLand 1Nis the associated eigenvector,that is,L1N=0.IfGis connected,then 0 is the algebraically simple eigenvalue ofLand all the other eigenvalues are positive.
C.Problem Formulation
In this paper,we consider an input saturated multi-agent system consisting ofNfollowers and one leader which can be described by a graph.It containsNagents(related to graphG)and a leader with directed edges from some agents to the leader Graphis said to be connected if at least one agent in each component of graphGis connected to the leader by a directed edge.In addition,we defineG=diag{g1,g2,···,gN}as the leader adjacency matrix associated with graph,wheregi>0 if agentiis adjacent to the leader and otherwisegi=0.
Consider a system withNagents,and the dynamics of each agent is

wherexi∈Rnandui∈Rmare respectively the state and input vectors.The function sat(·):Rm→Rmis a vector valued standard saturation function,i.e.,

and for eachk=1,2,···,m,sat()=sgn)×min{1,||}.Here,we have slightly abused the notation by using sat(·)to denote both the scalar valued and vector valued functions.We have also assumed without loss of generality the unity saturation level.Nonunity saturation level can be absorbed by matrixBand the feedback gain.
The leader trajectoryxlthat the agents′statesxiwill follow satisfies

wherexl∈Rnis the state,AandBare the same as those defined in(2).
The following assumption,lemma,and definition are necessary in the development of this paper.
Assumption 1.The pair(A,B)is controllable,and all the eigenvalues ofAare in the closed left half complex plane,which is equivalent to the ANCBC of system(2)with the leader(3).
Lemma 1[8].LetQ:[0,1]→Rn×n:be a continuously differentiable matrix-valued function such thatQ(0)=0,and(dQ(ε)/dε)>0 for anyε∈(0,1].Also,let Assumption 1 be satisfied.Then,the continuous-time algebraic Riccati equation defined as

has a unique positive definite solutionP(ε)for anyε∈(0,1].Moreover,this positive definite solutionP(ε)has the following properties:
1)For anyε∈(0,1],P(ε)makesA−BBTP(ε)be Hurwitz-stable;
2)limε→0+P(ε)=0;
3)P(ε)is continuously differentiable with respect toεand
For the positive definite solutionP(ε)∈Rn×n,ε∈(0,1]of(4),and a positive scalarξ,let Ω(P(ε),ξ)represent the following ellipsoid:

Lemma 2.Define the sets Θ(P(ε))={x∈Rn:xTP(ε)x·tr(BTP(ε)B)≤1},andL(BTP(ε))={x∈Rn:‖BTP(ε)x‖∞≤1};then,for∀x∈Rn,we have Θ(P(ε))⊂L(BTP(ε)),whereP(ε),ε∈(0,1]is the positive definite solution of the Riccati equation(4).
Proof.SinceP(ε)is positive definite,we haveP(ε)=WTWfor some nonsingularW.Then

Since tr(M·N)=tr(N·M),whereMandNare of appropriate dimensions,we obtain

Therefore,‖BTP(ε)x‖∞≤1.□
Lemma 3[15].If graphis connected,then the symmetric matrixH=L+Gassociated withis positive definite.
Definition 1.For system(2)and any given arbitrarily large bounded setX∈Rn,if for any initialxi(0)∈X⊂Ω(P(ε),ξ)defined in(5)such that

holds,then the tracking problem of leader-follower is said to be solved semi-globally,and the set Ω(P(ε),ξ)is called the domain of synchronization of system(2).
III.MAIN RESULTS
In this section,we would like to extend the low-and-highgain design methods introduced earlier by Lin and Saberi and their coworkers[9,11]for linear systems with actuator saturation to the tracking control of leader-follower multi-agent systems subject to actuator saturation,and propose a new family of scheduled low-and-high-gain control protocols that can be used to solve the tracking problem of system(2).
A.Scheduled Low-and-high-gain Feedback Design
For system(2),it is assumed that only a subset of agents have access to model(3).In this case,the information available to followeriis given by

and a family of parameterized low-and-high-gain feedback laws is proposed as

wherevi∈Rnis the estimate ofxi−xl,i=1,2,···,N,δiis defined as

andP(ε),ε∈(0,1]is the positive definite solution of the Riccati equation(4).We refer to the control law(9)as lowand-high-gain feedback laws andεas the low-gain parameter,since in view of Lemma 1,the norm of the feedback gain matrixBTP(ε)can be made arbitrarily small by choosing a sufficiently smallε,andρ>0 is called a high-gain parameter for it can possibly take a high value.
Remark 1.For the multi-agent systems with fixed and connected topology,the low-gain parameterεsolely controls the domain of synchronization Ω(P(ε),ξ)defined in Definition 1,i.e.,by tuning the parameterε,one can control the size of the domain of synchronization;the smaller parameterε,the larger the domain of synchronization.On the other hand,although the high-gain parameterρdoes not affect the domain of synchronization,it can be used in improving the tracking rate of system(2)(see Example 1).
With the control law(9),the tracking problem of leader follower is said to be solved if

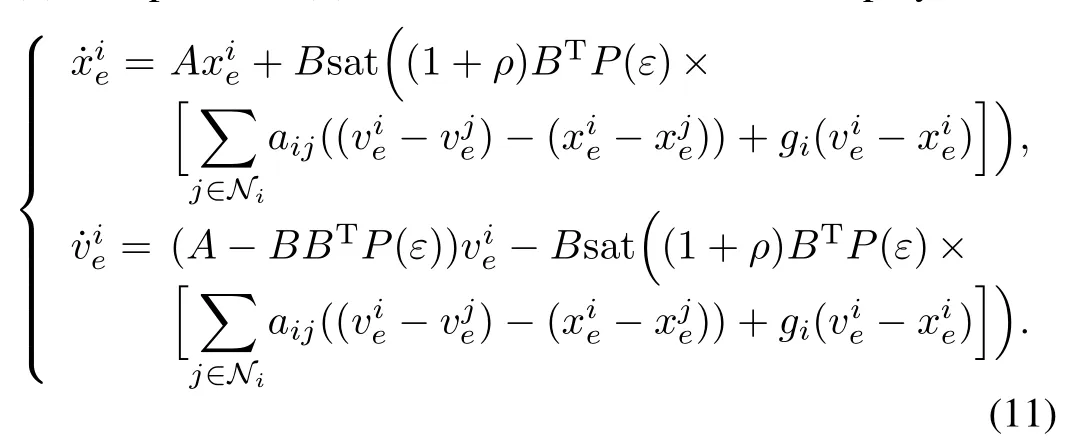
B.Tracking Control with Low-and-high-gain Feedback
Letxie=xi−xlandthen associating with(2),(3)and protocol(9),we have the error closed-loop system
Let

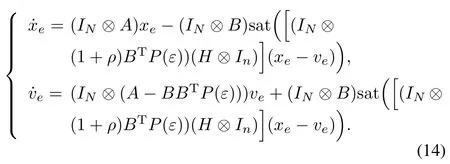
Denote byxe,ve,andηthe stacks of vectors···,and{η1,η2,···,ηN},respectively.From(12),we have

whereH=L+G.Then,the closed-loop system(11)becomes
According to[14],sinceHis symmetric,there exists an orthogonal matrixTsuch that

is diagonal,whereλi,i∈Nare the eigenvalues ofH.According to Lemma 3,if graphis connected,then allλi>0.
Now,by the orthogonal transformation

system(14)becomes

Then the decoupled subsystems fori∈Nare
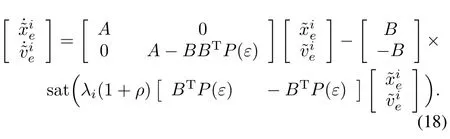
Obviously,if the adjacent graphis connected,the tracking problem can be solved if and only if system(18)is simultaneously asymptotically stable fori=1,2,···,N,whereP(ε),ε∈(0,1]is the positive definite solution of the Riccati equation(4).
We have the following result on simultaneous local stabilization by the low-and-high-gain feedback.
Theorem 1.Consider a finite set of linear systems subject to actuator saturation

where sat(ui)is defined as in(2),allλi>0,i=1,2,···,N,and the others are the same as in system(18).Then,under Assumption 1,there exists a family of low-and-high-gains−(1+ρ)BTP(ε)satisfying

such that the low-and-high-gain state feedback

locally simultaneously stabilizes theNsystems in(19),whereλiminis the minimum value ofλi.
Proof.The closed-loop system(19)with the given scheduled low-and-high-gain feedback law(21)is(18).We will adopt Lyapunov function

for thei-th system in(18)and consider its level set of the form

From Lemma 2,we have Θi(P(ε))⊂Li(BTP(ε)),where

Clearly,the right-hand side of the above closed-loop system is locally Lipschitz forThus,in view of(4),for anythe derivative ofalone the trajectory of the closed-loop system(18)satisfies
where
and(j=1,2,···,m),i∈Ndenotes thej-th element ofmdimensional vector
From(20)and the fact that

we have

In view of Assumption 1 and Lemma 1,we obtain−Q(ε)+P(ε)BBTP(ε)≤0.Then,it follows from(25)and(26)that forwhich shows that for allρsatisfyingthe scheduled low-and-high-gain state feedback(21)can locally simultaneously stabilize theNsystems in(19)at the origin withinξ>0,i∈N.□
In the sequel,we can obtain the extended result based on Theorem 1.
Corollary 1.Consider a finite set of linear systems subject to actuator saturation defined as in(19).Then,under Assumption 1,the family of low-and-high-gain state feedback laws(21)satisfying(20)semi-globally simultaneously stabilize theNsystems in(19).That is,for any given arbitrarily large bounded setX⊂R2n,there exists anε∗∈(0,1]such that,for anyε∈(0,ε∗],the closed-loop system(19)with control(21)is simultaneously asymptotically stable withXcontained in the domain of attraction,whereandεare the same as in Theorem 1.
Proof.From the proof of Theorem 1,and the fact that ˙Vi<0,we know that Θi(P(ε))is an invariant subset and contained in the domain of attraction ofi-th system in(19).Thus,is an invariant subset of domain of attraction of system(19).On the other hand,since the origin is the center of each ellipsoid Θi(P(ε)),Ξ(P(ε),ξ)is a non-empty set.Moreover,for any given arbitrarily large bounded setX⊂R2n,there exists anε∗∈(0,1]such that,for anyε∈(0,ε∗],X⊂Ξ(P(ε),ξ)⊂R2nis contained in the domain of attraction.Such anε∗exists asXis bounded,and the□
Based on Theorem 1 and Corollary 1,we can obtain the following theorem.
Theorem 2.Consider the leader-follower multi-agent system(2)and(3).Assume the adjacent graphcomposed ofNfollowers and one leader is connected.Then,under Assumption 1,all the followers can track the leader semiglobally via local error low-and-high-gain feedback(9)satisfyingThat is,for any given arbitrarily large bounded setX∗⊂R2n,there exists anε∗∈(0,1]such that,for anyε∈(0,ε∗],all the followers can track the leader asymptotically withinX∗contained in the domain of synchronization,whereλiminis the minimum eigenvalue of matrixHcorresponding to graph,andεis the same as in Corollary 1.
Proof.Under the orthogonal transformation(15),the closedloop system consisting ofNagents(2),leader(3)and the control law(9)can be written as(17).For system(17),construct the following Lyapunov function candidate

Rewrite(27)as

whereis defined as in(22).Since the adjacent graphis connected,from Lemma 3 we know all the eigenvaluesλiare positive.In view of Assumption 1 and Theorem 1,taking the time derivative ofV(t)along(17)yields

forwhere Θi(P(ε))is defined as in(23).By Corollary 1,under Assumption 1,for any given arbitrarily large bounded setX⊂R2n,there exists anε∗∈(0,1]such that,for anyε∈(0,ε∗],system(17)is asymptotically stabilized at the origin withXcontained in the domain of attraction for the gain(1+ρ)BTP(ε),ε∈(0,1]satisfyingλimin(1+ρ)≥1.That is,

Then,based on(16)and the construction ofT,we obtain that for any given arbitrarily large bounded setX∗⊂Ξ(P(ε),ξ),there exist anε∗∈(0,1]and∀ε∈(0,ε∗],such that

Therefore,all the followers can track the leader semi-globally.□
Remark 2.The results obtained in this paper are all based on a group of agents with linear systems subject to actuator saturation over a fixed undirected communication topology,and it should be pointed out that based on the result of[24]and Lemma 5 in[25],the method proposed in this paper can also be used to investigate the leader-following consensus problem for such multi-agent systems over the directed graph with a directed spanning tree,as long as the method and its conditions attached to are properly adjusted.
IV.ILLUSTRATIVE EXAMPLE
In this section,an example is given to verify the effectiveness of the proposed theoretical results in this paper.
Example 1.Consider a leader-follower multi-agent system(4)with followers satisfying

and one leader satisfying

whereand sat(ui)are defined as in systems(2)and(3),respectively,and

Clearly,Ahas two repeat eigenvalues at the origin and(A,B)is controllable,thus,Assumption 1 holds.Assume the adjacentgraph(with the leader labeled 0)is given by Fig.1.The Laplacian of graphG(without the leader)is
and the leader adjacent matrixG=diag{1,0,0,1}.The eigenvalues ofHareλ1=2.6180,λ2=0.3820,λ3=0.3820,andλ4=2.6180.
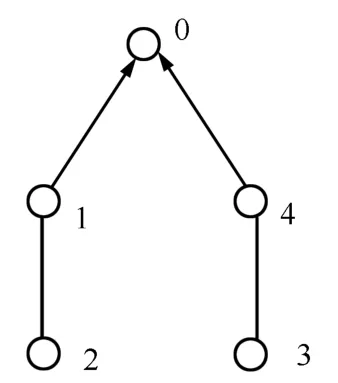
Fig.1.The adjacent graph.
To construct the low-and-high-gain feedback laws(9),we chooseQ(ε)=εI2and solve the algebraic Ricatti equation(4)to obtain the following equation[9]

with
Takeρ=8,which satisfiesλ2ρ=3.056>1,ε=0.025 and the initial values:

Then,for(0),(0)∈R2,i∈N,we can check that(23)is satis fied.The simulation result ofxi−xl,i=1,2,3,4 is shown in Fig.2,which indicates that all four followers can track the leader eventually.
Next,we takeρ=15,εand the initial values are the same as in Fig.2.In this case,the simulation of state trajectories ofxi−xl,i=1,2,3,4 are shown in Fig.3.From Figs.2 and 3,we can conclude that the high-gain parameterρcan improve the tracking speed indeed.
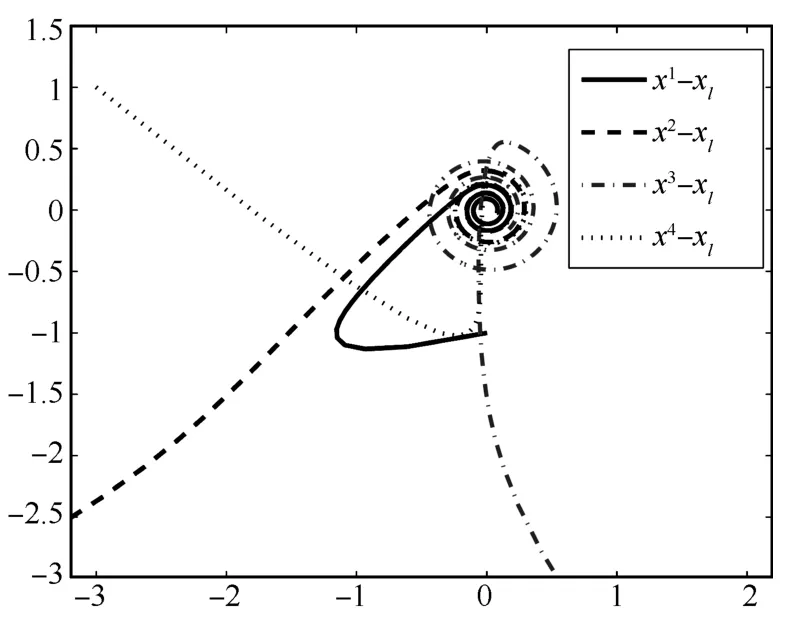
Fig.2.Trajectories of xi−xl.
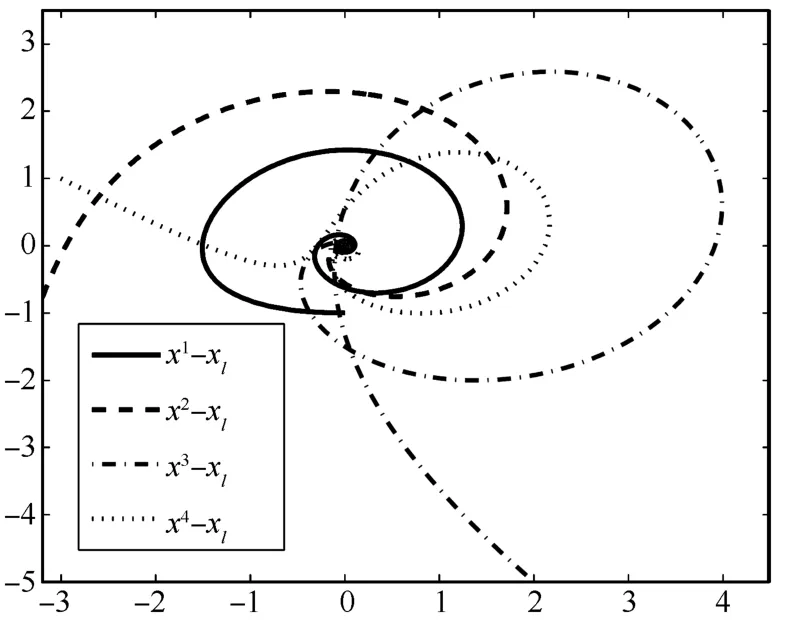
Fig.3.Trajectories of xi−xl.
To show that this family of low-and-high-gain feedback laws solve tracking problem semi-globally,we simulate the followers and the leader for different values of the low gain parameterε.Figs.4~7 are the simulation results of states of‖xi−xl‖and controls of sat(ui)under the high-gain parameterρ=15 and the same initial condition as in(32).
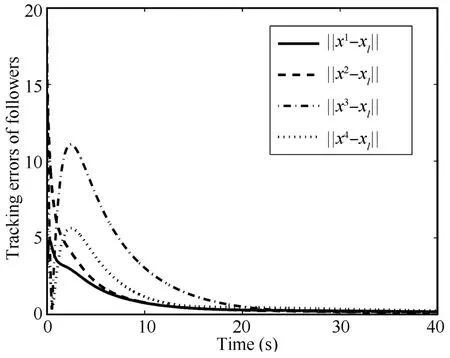
Fig.4.The tracking errors of followers.
Figs.4 and 5 show the 2-norm ofxi−xlcorresponding toε=0.025 andε=0.001,respectively,the control of sat(ui)corresponding toε=0.025 andε=0.001 are presented in Figs.6 and 7.It is clear from these plots that for the given initial state,the peak value of the control sat(ui)decreases as the value of the low-gain parameter decreases,which indicates that the tracking problem can be solved semi-globally.
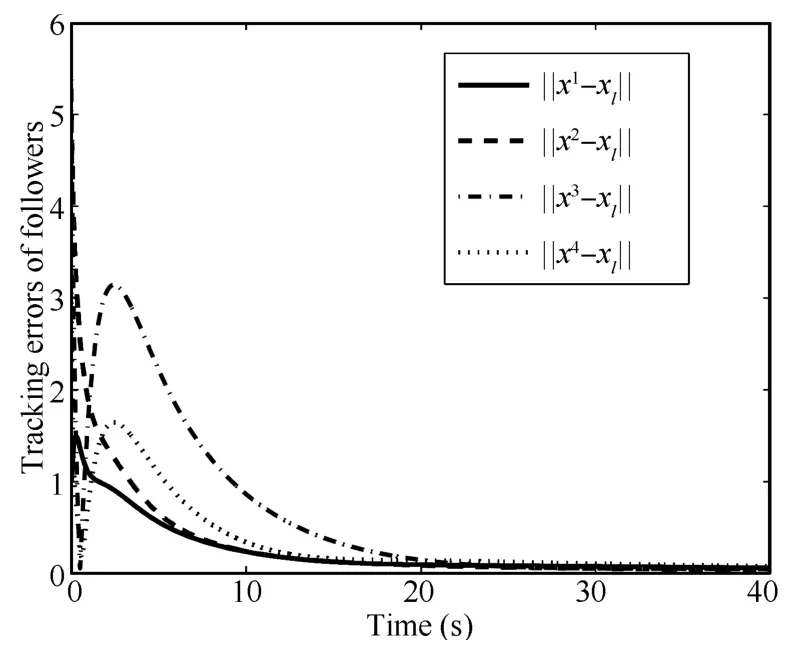
Fig.5.The tracking errors of followers.

Fig.6.Trajectories of sat(ui).

Fig.7.Trajectories of sat(ui).
V.CONCLUSION
In this paper,we have investigated the tracking problem of leader-follower multi-agent systems subject to actuator saturation.An active leader node or control node generates the desired tracking trajectories.To track such a leader,we have proposed a new family of scheduled low-and-high-gain feedback controller laws which rely on the asymptotical property of a class of parametric algebraic Ricatti equations.Our control law is equipped with a design parameter that can be adjusted to track the leader semi-globally for all the followers.An illustrative example with simulations shows the effectiveness of the method proposed for the multi-agent systems with actuator saturation and an active leader.Future research will be concentrated on applying the results to investigate the tracking problem of leader-follower for multi-agent systems over the directed graph with a directed spanning tree,or over a switched communication topology.
REFERENCES
[1]Hu T S,Lin Z L.Control Systems with Actuator Saturation:Analysis and Design.Boston:Birkha¨user,2001
[2]Lin Z L,Saberi A.Semi-global exponential stabilization of linear systems subject to“input saturation”via linear feedbacks.Systems and Control Letters,1993,21(3):225−239
[3]Chen B M,Lee T H,Peng K M,Venkataramanan V.Composite nonlinear feedback control for linear systems with input saturation:theory and an application.IEEE Transactions on Automatic Control,2003,48(3):427−439
[4]da Silva J M G,Tarbouriech S.Local stabilization of discrete-time linear systems with saturating controls:an LMI-based approach.IEEE Transactions on Automatic Control,2001,46(1):119−125
[5]Wei A R,Wang Y Z.Stabilization andH∞control of nonlinear portcontrolled hamiltonian systems subject to actuator saturation.Automatica,2010,46(12):2008−2013
[6]Cao Y Y,Lin Z L,Ward D G.Anti-windup design of output tracking systems subject to actuator saturation and constant disturbances.Automatica,2004,40(7):1221−1228
[7]Zhou B,Duan G G,Lin Z L.A parametric Lyapunov equation approach to the design of low gain feedback.IEEE Transactions on Automatic Control,2008,53(6):1548−1554
[8]Sabrei A,Hou P,Stoorvogel A A.On simultaneous global external and global internal stabilization of critically unstable linear systems with saturating actuators.IEEE Transactions on Automatic Control,2000,45(6):1042−1052
[9]Lin Z L.Low Gain Feedback.London:Springer-Verlag,1998.
[10]Teel A R.Semi-global stabilizability of linear null controllable systems with input nonlinearities.IEEE Transactions on Automatic Control,1995,40(1):96−100
[11]Lin Z L.H∞-almost disturbance decoupling with internal stability for linear systems subject to input saturation.IEEE Transactions on Automatic Control,1997,42(7):992−995
[12]Olfati-Saber R,Fax J A,Murray R M.Consensus and cooperation in networked multi-agent systems.Proceedings of the IEEE,2007,95(1):215−233
[13]Ren W,Beard R,Atkins E.A survey of consensus problems in multiagent coordination.In:Proceedings of the 2005 American Control Conference.Portland,OR,USA:IEEE,2005.1859−1864
[14]Fax J A,Murray R M.Information flow and cooperative control of vehicle formations.IEEE Transactions on Automatic Control,2004,49(9):1465−1476
[15]Hong Y G,Hu J P,Gao L X.Tracking control for multi-agent consensus with an active leader and variable topology.Automatica,2006,42(7):1177−1182
[16]Li X,Wang X F,Chen G R.Pinning a complex dynamical network to its equilibrium.IEEE Transactions on Circuits and Systems—I:Regular Papers,2004,51(10):2074−2087
[17]Ren W,Moore K L,Chen Y Q.High-order and model reference consensus algorithms in cooperative control of multi-vehicle systems.Journal of Dynamic Systems,Measurement,and Control,2007,129(5):678−688
[18]Jadbabaie A,Lin J,Morse A S.Coordination of groups of mobile autonomous agents using nearest neighbor rules.IEEE Transactions on Automatic Control,2003,48(6):988−1001
[19]Gustavi T,Dimarogonas D,Egerstedt M,Hu X M.Sufficient conditions for connectivity maintenance and rendezvous in leader-follower networks.Automatica,2010,46(1):133−139
[20]Hong Y G,Chen G R,Bushnell L.Distributed observers design for leader-following control of multi-agent networks.Automatica,2008,44(3):846−850
[21]Nedic A,Ozdaglar A,Parrilo P A.Constrained consensus and optimization in multi-agent networks.IEEE Transactions on Automatic Control,2010,55(4):922−938
[22]Corte´s J.Finite-time convergent gradient flows with applications to network consensus.Automatica,2006,42(11):1993−2000
[23]Yang T,Stoorvogel A A,Grip H F,Saberi A.Semi-global regulation of output synchronization for heterogeneous networks of non-introspective,invertible agents subject to actuator saturation.International Journal of Robust and Nonlinear Control,doi:10.1002/rnc.2905
[24]Meng Z Y,Zhao Z Y,Lin Z L.On global leader-following consensus of identical linear dynamic systems subject to actuator saturation.Systems and Control Letters,2013,62(2):132−142
[25]Li Z K,Duan Z S,Chen G R,Huang L.Consensus of multiagent systems and synchronization of complex networks:a unified viewpoint.IEEE Transactions on Circuits and Systems-I:Regular Papers,2010,57(1):213−224
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Cooperative Localization of AUVs Using Moving Horizon Estimation
- Distributed Control of Nonlinear Uncertain Systems:A Cyclic-small-gain Approach
- Decentralised Formation Control and Stability Analysis for Multi-vehicle Cooperative Manoeuvre
- Distributed Self-triggered Control for Consensus of Multi-agent Systems
- An Overview of Distributed High-order Multi-agent Coordination
- Adaptive Neural Region Tracking Control of Multi-fully Actuated Ocean Surface Vessels