Adaptive Neural Region Tracking Control of Multi-fully Actuated Ocean Surface Vessels
2014-05-08XiaomingSunShuzhiSamGe
Xiaoming SunShuzhi Sam Ge
I.INTRODUCTION
RESEARCH on multi-agent systems(or networked cooperative systems)with applications to the cooperation of unmanned aerial vehicles(UAVs),autonomous underwater vehicles(AUVs),robots,scheduling of automated highway systems has attracted much attention in the past two decades[1−12].Efforts towards stabilization and tracking control of multi-fully actuated ocean surface vessels as the need for rescuing,exploring and preserving the oceanic environments have gained significant momentum.
In most of the present work,every agent is required to follow a specified path or track a prede fined position in the formation[9−12].Nonlinear robust adaptive control strategy was developed to force an underactuated surface ship to follow a predefined path at a desired speed in[13].Moreover,feedback control law was designed to stabilize the underactuated vessel to a desired constant position and orientation in[14].In[15],a combination of line-of-sight path following and nonlinear synchronization strategies was studied.Nontrivial coordinate changes,graph theory,and stability theory of linear time-varying systems were used to design cooperative control laws for underactuated vessels to perform a geometric pattern[2].
It is interesting to observe from examples of group behavior in the nature that accurate speci fication of the path of each agent in the group seems to be not necessary.Swarming behavior is more common where agents are loosely distributed within a moving target region,not requiring specific orders or positions of the agents inside the region.The region reaching control concept was presented for robot manipulator,in which the desired objective can be speci fied as a region instead of a point in[16],and[17]proposed the new regionreaching controller for an underwater vehicle mounted with a manipulator.It has been shown that region reaching tasks save energy and result in faster motion.In[18],an adaptive region boundary-based concept was presented for an AUV,in which the controller was designed to allow the convergence of the vehicle to the boundary or a motionless region surface regardless of its initial position.Region following formation control concept has been proposed[19−20],where all the robots stay within a moving region as a group,while maintaining a minimum distance among themselves.Recently,the region following control concept has been developed for general multi-agent systems with high-order dynamics in previous work[21].
In this paper,we propose a decentralized cooperative controller for multi-fully actuated ocean vessel systems.A group of ocean vessels with limited sensing ranges are driven into a moving target region without collisions,and the connectivity preservation of the dynamic interaction network is guaranteed.By using the objective function,the desired region can be specified as an arbitrary shape,and hence we can form different formations.The decentralized controller permits the ocean vessels in the group to only communicate with their neighbors.It reduces communication or sensing requirement,and is relatively more scalable with respect to the group size.We introduce the artificial potential functions to preserve the connectivity of the network and guarantee no collisions between any ocean vessels[22−23].The chosen potential functions possess the special property of approaching infinity whenever its arguments approach some limits[24−25].
The handling of unknown perturbations to the nominal model,in the form of parametric and functional uncertainties,unmodeled dynamics,and disturbances from the environment,is an important issue of model-based control of ocean vessels.Traditional model-based adaptive controllers may not be applicable since they are useful only when dealing with systems in which the dynamics are linear-in-the-parameters,the uncertainties are parametric and time-invariant,and the regressors are exactly known[26].For overcoming the limitations of model-based adaptive controllers,we adopt approximationbased control techniques to compensate for functional uncer-tainties and unknown disturbances from the environment.
The main contributions of this work are listed as follows:
1)The detailed theoretical formation,which can enable a swarm of multi-fully actuated ocean surface vessels to track a moving target region,is proposed in the presence of uncertainties and unknown disturbances.
2)The artificial potential function is subtly introduced to preserve the connectivity of the network.Connectivity is a common assumption in the consensus analysis of multi-agent systems.In fact,it is not always valid in the networked systems whose sensors are distance dependent,and thus in order to accomplish a cooperative task,the connectivity of the network is required to be maintained.
3)The collision avoidance potential function is chosen to prevent the collisions between vessels when they are inside their danger ranges.Especially,the length of vessel is considered in the designing such that the collision avoidance function approaches infinity whenever any other vessels come in contact with the vessel,i.e.,a collision occurs.
4)The approximation-based controller for fully actuated surface vessels is designed using Lyapunov synthesis.Such approximators can use a standard regressor function whose structure is independent of the ocean vessel’s dynamic characteristics,thus it increases the portability of the same control algorithm on different ocean vessel systems.
The remainder of the paper is organized as follows.In Section II,the problem is stated and some preliminaries are presented.In Section III,the region tracking controller of multi-fully actuated surface vessel systems is designed and the effectiveness of our algorithm is analysed.In Section IV,simulation results are presented to illustrate the performance of the proposed region tracking controller.Finally,we conclude the paper in Section V.
II.PROBLEM FORMULATION
A.Vessel Dynamics
Consider a group ofNfully actuated vessels,and the multiple-input-multiple-output(MIMO)dynamics of the 3 degrees-of-freedom(3DOF)vesseliis

whereηi=[xi,yi,ψi]T∈R3,i=1,2,···,N,is the vector representing the inertial earth- fixed frame position and heading,respectively;νi=[ui,vi,ri]T∈R3is the vector representing the vessel surge,sway,and yaw velocities,respectively as shown in Fig.1;di=[di1,di2,di3]T∈R3is the vector representing the unknown disturbance from the environment,and/or unmodeled dynamics,among others;andτi∈R3is the vector of input signals.The matricesRi(ηi),Mi,Ci(νi),andDi(νi)are given as below:
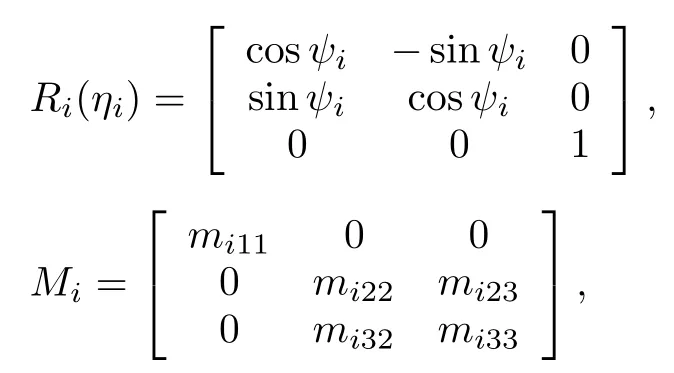
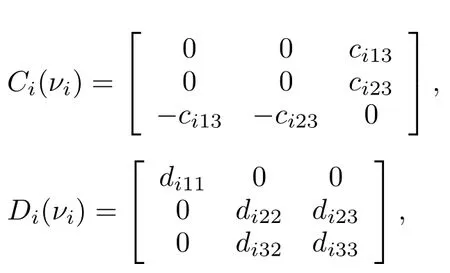
with
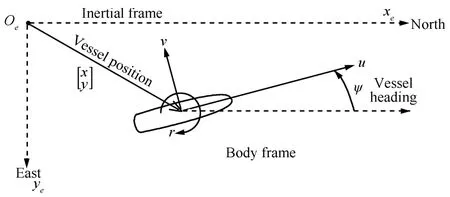
Fig.1.Figure showing the inertial earth- fixed frame and the body- fixed frame for a vessel.

wheremiis the mass of the vesseli,Iizis the inertia of vessel about theZi-axis of the body- fixed frame,xigis theXi-coordinate of the vessel center of gravity,and the other symbols are hydrodynamic derivatives.Using semi-empirical methods or hydrodynamic computation programs,the coefficients inMiandCi(νi)are determined quite accurately[26].There exists dif ficulty in finding the coefficients inDi(νi),and thus,we rewrite(1)as

where the smooth function vectorκi(νi)is the known part of−Di(νi)νi,andgi(ηi,νi),i=1,···,nare unknown smooth functions,so thatκi(νi)+gi(ηi,νi)=Ri(ηi)Tdi−Di(νi)νi.The system inertial matrixMi=MTi>0,and premultiplying by,model(2)is in parametric strict feedback form.To design the tracking controller for multi-fully actuated ocean surface vessel systems,we impose the following assumptions on the communication and initial conditions between the vessels in the group.
Assumption 1.All vessels have the same characteristics.
We associate the vessels with nodes in a graph and information exchange with its edges.The communication graphGis defined for describing the inter-vessel communication.We useGito denote the set of indices for those vessels having communication with vesseli.
Assumption 2.The communication graphGis an undirected graph and connected initially.
Definition 1.The undirected graphG=(V,E)consists of a set of verticesV={1,···,N}indexed by the group members,and a set of edges,E={(i,j)∈V×V|i∈Gj}containing pairs of nodes that show inter-vessel communication specifications.
Assumption 3.Each vessel has a communication rangeR.
For simplicity,we assume that all vessels move in a twodimensional(2-D)workspace.Their position in the workspace is denoted byqi=[xi,yi]T,andηi=[qTi,ψi]T.The setGican be defined as the set that vesselican communicate when it is located at its initial position:

The objective is to design an adaptive neural network region tracking controller for each vessel such that all vessels can converge to a common moving target region without collisions between vessels in the group,while the connectivity of the communication graph remains for all time.The target region function,RT(·),can be speci fied by an inequality function as follows:RT(·)=[RT1(·),···,RTi(·),···,RTN(·)]T≤0,whereRT(·)∈R is a continuous scalar function with continuous first partial derivative,so that the desired target region for vesseli,i=1,···,N,can be simply specified as a circle with radiusr0,aswhereq0(t)=[q0,x(t),q0,y(t)]Tis the center of the moving target region,andAn illustration of the target region function is shown in Fig.2.Clearly,ifr0reduces to zero,the desired target region reduces to a point,that is,the moving target region tracking control concept is a generalization of path following.

Fig.2.Illustration of the target region function.
Assumption 4.The positionq0(t)and velocityof the center of the moving target region are continuous and bounded.
Assumption 5.The target region is big enough to accommodate all vessels and their own communication ranges.
In the later part of this paper,the time argument will be omitted if no confusion is expected.We mathematically formulate the control objective by defining the variableψi,dasThen,the function for the control objective is presented as

whereand.
B.Potential Functions
The potential functions consist of target tracking function,collision avoidance function,and connectivity maintenance function,which are speci fied as below.
1)Target tracking function:The target tracking function is designed for each vessel to track the common target region by putting a penalty on the tracking errors.The target tracking functionPi,0:R3→R for vesseliis chosen as follows:

whereciis a positive constant.The target tracking function has the following properties:
1)Pi,0=0,if;
2)Pi,0>0,if;
3)Pi,0→∞,if.
2)Collision avoidance function:Definition 2.Each vessel has a danger range,which is centered at the vessel,with radiusr(r<R).
To prevent the collisions between vessels when they are inside their danger ranges,the collision avoidance function is chosen.Hiis presented to denote the set containing all those vessels within the danger range of vesselias follows,where.The collision avoidance functionPi,jfor vesseliis chosen as follows:
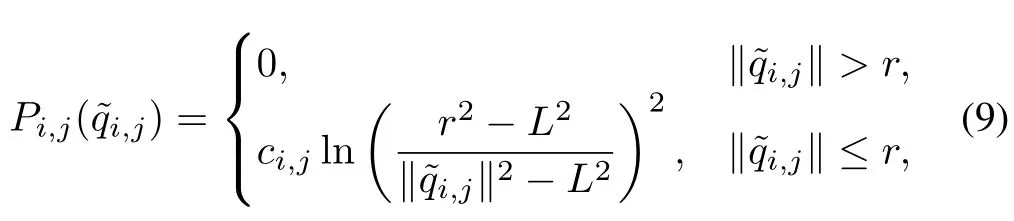
whereci,j=cj,iis a positive constant.The length of vessel,L(L<r),is considered in the designing such that it is equal to in finity whenever any vessels come in contact with the vesseli,i.e.,a collision occurs.The collision avoidance functionPi,jhas the following properties:
1)Pi,j=0,if;
2)Pi,j>0,if;
3)Pi,jis monotonically increasing with the decreasing of,if;
4)Pi,j→∞,if.
3)Connectivity maintenance function:Connectivity is a common assumption in the consensus analysis of multi-agent systems.In fact,it is not always valid in the networked systems whose sensors are distance dependent.Therefore the connectivity maintenance potential function is designed to preserve the connectivity of the network,that is,the vessels are initially located in the communication zone of a vessel,and they will remain in this area for all time.We define the connectivity maintenance function as follows:

whereis positive,and.The connectivity maintenance function has the following properties:
1)Qi,j→∞,if;
2)Qi,jis continuous and differentiable,.
C.Function Approximation
In control engineering,linearly parameterized neural network has been successfully used to approximate the following unknown continuous functionFi(Zi):Rq→R fori-th vessel[27−28]:whereZi=[zi1,zi2,···,ziq]T∈Rqis the input vector,ϕi∈Rlis the weight vector with the neural network node numberl,φi(Zi)∈Rlis a vector of known continuous basis functions,andεi(Zi)is called the neural network approximation error which satisfies∀Zi∈ΩZiwith the unknown constantε∗i>0.
According to the universal approximation property,iflis chosen suf ficiently large,can smoothly approximate any continuous functionFi(Zi)over a compact set ΩZi⊂Rqto an arbitrary degree of accuracy asεi(Zi),∀Zi∈ΩZi⊂Rq,whereis the ideal constant weight vector,andεi(Zi)is the approximation error for the special case whereThe ideal weight vectoris an arti ficial quantity required for analytical purposes.is defined as the value ofϕithat minimizes|εi|for allZi∈ΩZi⊂Rq,that isϕ∗i=argminϕi∈Rl
Lemma 1[29].The following inequality holds for any∈>0 and for anyη∈R 0≤|η|−ηtanhwhereκis a constant that satisfiesκ=exp[−(κ+1)],i.e.,κ=0.2785.The scalar∈>0 is a(small)positive design constant,and tanh(·)denotes the hyperbolic tangent function.
III.CONTROL DESIGN AND STABILITY ANALYSIS
In this section,we present the decentralized adaptive neural network control scheme for vesselito achieve the control objective.Feedforward approximators are used to compensate for unknown nonlinear functions.Using the potential functions in the first step of recursion,we can guarantee that all vessels can track the moving target region without collisions,and the connectivity of the network remains for all time.The second step follows the standard backstepping procedure with the quadratic Lyapunov functions[30].According to the analysis above,the whole potential function can be written asThen,the derivative ofV1can be expressed as

According to the fact that the interactions between vessels are bi-directional,we can obtain

Similarly,we can obtainThen,we have
According to the theory of matrix calculus,we obtainandThen,the derivative ofV1is given by

where
Step 1.Denote the error coordinates
whereαiis a stabilizing function vector to be designed,is the parameter estimate,andis the estimated error vector of the parameter.Differentiatingzi,1with respect to time yields

We choose the potential function as the Lyapunov function candidate.Then,we have

Noting the propertywe have the followingPwhich means that the arti ficial potential functionV1keeps decreasing as long asandV1can converge to a neighborhood of the origin whileνiapproachesHence,the virtual controlαican be chosen asThen according to the Young′s inequality,the time derivative ofV1along the trajectories of(26)is given by
whereandare positive.
Step 2.In this step,we design the control law recursively to stabilize the error dynamics ofzi,2.Differentiatingzi,2with respect to time yields

Consider the Lyapunov function candidate

wherethe time derivative ofV2is
The desired control law and the adaptive update law forare then designed as

Substituting(34)and(35)into equation(33),we can obtain

where∈i,σiandki,2are positive constants.It is clear that.According to Lemma 1,we can obtain

and by Young′s inequality,we haveTherefore,the derivative ofV2satisfies the following inequality
whereis positive.As the potential functionV1and‖▽ηiV1‖change simultaneously with the same arguments,we can knowV2can converge to a bounded compact set as the time approaches in finity.Therefore the boundary of the potential function,V1,can be guaranteed.
Theorem 1.Consider the vessel dynamics(1)under Assumptions 1~5,with region tracking control law(34)and the update law(35).For initial conditions starting in any compact set Ω0,the whole potential functionV1can converge to a bounded compact set,which gives rise to the convergence ofηi,i=1,2,···,N,to the desired target set,with the connectivity of the network maintained,while no collisions happen between any vessels for allt>0.
Proof.First,we prove the convergence of vesselito the common moving target region.
Since the whole artificial potential functionV1is bounded,the potential functionsPi,0,Pi,j,andQi,jare all bounded.Therefore,the tracking error of each ocean vessel can converge to an adjustable neighborhood of the origin,although some of them do not access the desired target region directly.
Next,we show that there are no collisions between any vessels,and the connectivity of the network can be maintained for all time.
Since the functionPi,jis bounded,hence,according to the property ofPi,j,,i.e.,there are no collisions between any vessels for allt>0.Similarly,according to the property ofQi,j,we can obtain,that is,the connectivity of the network can be maintained for allt>0.□
IV.SIMULATION RESULTS
In our simulation study,we consider the model vessel called CyberShip II,a 1:70 scale supply vessel replica built in a marine control laboratory in the Norwegian University of Science and Technology.The model can be rewritten as(2),with parameters obtained from[26].Fig.3 shows the communication relationships among vessels.
We consider a group of vessels withN=8,the danger range radiusr=2.0m and the communication range radiusR=3.0m.The vessels are initialized randomly around the target region withq0(0)=[0.0,0.0]T,η1(0)=[−5.0,0.0,0.0]T,η2(0)=[−3.5,2.0,0.0]T,η3(0)=[−2.5,0.0,0.0]T,η4(0)=[0.0,0.0,0.0]T,η5(0)=[2.5,0.0,0.0]T,η6(0)=[5.0,0.0,0.0]T,η7(0)=[3.5,−2.0,0.0]T,η8(0)=[3.5,−4.5,0.0]T.The center of the common target region,q0,moves along the desired trajectoryq0(t)=[t,20sin(0.1t)]Twithr0=5.0m.Simulation results are shown in Figs.4~6.
Fig.4 clearly shows the tracking process of all vessels which can successfully track the common moving target region,and the boundness ofPi,0in Fig.6 further con firms it.The trajectories of all vessels and the center of the moving target region are shown in Fig.5.We can see all vessels can synchronously track the center of the moving target region.From Figs.4 and 5,we can also find the connectivity of the network remains for all time.Moreover,the boundness of the connectivity maintenance function,Qi,j,in Fig.6 further con firms the connectivity maintenance.Fig.6 also shows the boundness of collision avoidance functionPi,j.Therefore,we obtain that no collisions among vessels can be guaranteed.

Fig.3.Communication topology.

Fig.4.A group of vessels synchronously tracking the target region.

Fig.5 Trajectories of the ocean vessels.
V.CONCLUSION
In this paper,due to the advantages of the target region tracking control for achieving better performance and energy saving,stable approximation-based region tracking control has been designed for a group of surface vessels in the presence of time-varying environmental disturbances,unmodeled dynamics,or parametric/functional uncertainties.Simulation results have demonstrated that all vessels can successfully track the common moving target region without collisions.At the same time,the connectivity of the network can be maintained for all time.

Fig.6 Potential functions.
ACKNOWLEDGEMENTS
The authors would like to thank Dr.Ren Bei-Bei,who is af filiated with Department of Mechanical Engineering,Texas Tech University,USA,for her valuable inputs to the paper.
REFERENCES
[1]Ren W.Consensus strategies for cooperative control of vehicle formations.IET Control Theory and Applications,2007,1(2):505−512
[2]Dong W,Farrell J A.Formation control of multiple underactuated surface vessels.IET Control Theory and Applications,2008,2(12):1077−1085
[3]Fua C H,Ge S S,Lim K W.Agent formations in 3D spaces with communication limitations using an adaptive Q-structure.Robotics and Autonomous Systems,2010,58(4):333−348
[4]Fax J A,Murray R M.Information flow and cooperative control of vehicle formations.IEEE Transactions on Automatic Control,2004,49(9):1465−1476
[5]Fua C H,Ge S S,Do K D,Lim K W.Multirobot formations based on the queue-formation scheme with limited communication.IEEE Transactions on Robotics,2007,23(6):1160−1169
[6]Ac¸ikmes¸e B,Hadaegh F,Scharf D,Ploen S.Formulation and analysis of stability for spacecraft formations.IET Control Theory and Applications,2007,1(2):461−474
[7]Cui R X,Ge S S,How V E B,Choo Y S.Leader-follower formation control of underactuated AUVs with leader position measurement.Ocean Engineering,2010,37(17−18):1491−1502
[8]Guo J,Yan G,Lin Z,Cao M.Adaptive control schemes for mobile robot formations with triangularised structures.IET Control Theory and Applications,2010,4(9):1817−1827
[9]Egerstedt M,Hu X M.Formation constrained multi-agent control.IEEE Transactions on Robotics and Automation,2001,17(6):947−951
[10]Ghommam J,Mehrjerdi H,Saad M,Mnif F.Formation path following control of unicycle-type mobile robots.Robotics and Autonomous Systems,2010,58(5):727−736
[11]Park B S,Yoo S J,Park J B,Choi Y H.A simple adaptive control approach for trajectory tracking of electrically driven nonholonomic mobile robots.IEEE Transactions on Control Systems Technology,2010,18(5):1199−1206
[12]Ren W,Beard R W.Decentralized scheme for spacecraft formation f l ying via the virtual structure approach.Journal of Guidance,Control,and Dynamics,2004,27(1):73−82
[13]Do K,Jiang Z,Pan J.Robust adaptive path following of underactuated ships.Automatica,2004,40(6):929−944
[14]Ghommam J,Mnif F,Derbel N.Global stabilisation and tracking control of underactuated surface vessels.IET Control Theory and Applications,2010,4(1):71−88
[15]Borhaug E,Pavlov A,Panteley E,Pettersen K Y.Straight line path following for formations of underactuated marine surface vessels.IEEE Transactions on Control Systems Technology,2011,19(3):493−506
[16]Cheah C,Wang D,Sun Y.Region-reaching control of robots.IEEE Transactions on Robotics,2007,23(6):1260−1264
[17]Sun Y,Cheah C.Region-reaching control for underwater vehicle with onboard manipulator.IET Control Theory and Applications,2007,2(9):819−828
[18]Ismail Z H,Dunnigan M W.A region boundary-based control scheme for an autonomous underwater vehicle.Ocean Engineering,2011,38(17−18):2270−2280
[19]Cheah C,Hou S,Slotine J.Region following formation control for multi-robot systems.In:Proceedings of the 2008 IEEE International Conference on Robotics and Automation.Pasadena,CA:IEEE,2008.3796−3801
[20]Cheah C C,Hou S P,Slotine J J E.Region-based shape control for a swarm of robots.Automatica,2009,45(10):2406−2411
[21]Ren B,Ge S S,Lee T H,Krstic M.Region tracking control for multi-agent systems with high-order dynamics.In:Proceedings of the 2013 American Control Conference.Washington,DC:IEEE,2013.1266−1271
[22]Zavlanos M M,Pappas G J.Controlling connectivity of dynamic graphs.In:Proceedings of the 44th IEEE Conference on Decision and Control.Seville,Spain:IEEE,2005.6388−6393
[23]Zavlanos M M,Jadbabaie A,Pappas G J.Flocking while preserving network connectivity.In:Proceedings of the 46th IEEE Conference on Decision and Control.New Orleans,USA:IEEE,2007.2919−2924
[24]Tee K P,Ge S S,Tay E H.Barrier Lyapunov functions for the control of output-constrained nonlinear systems.Automatica,2009,45(4):918−927
[25]Ren B,Ge S S,Tee K P,Lee T H.Adaptive neural control for output feedback nonlinear systems using a barrier lyapunov function.IEEE Transactions on Neural Networks,2010,21(8):1339−1345
[26]Skjetne R,Fossen T I,Kokotovic´ P V.Adaptive maneuvering,with experiments,for a model ship in a marine control laboratory.Automatica,2005,41(2):289−298
[27]Ren B,Ge S S,Su C Y,Lee T H.Adaptive neural control for a class of uncertain nonlinear systems in pure-feedback form with hysteresis input.IEEE Transactions on Systems,Man,and Cybernetics,Part B:Cybernetics,2009,39(2):431−443
[28]Ge S S,Wang C.Adaptive neural control of uncertain MIMO nonlinear systems.IEEE Transactions on Neural Networks,2004,15(3):674−692
[29]Polycarpou M M,Ioannou P A.A robust adaptive nonlinear control design.Automatica,1996,32(3):423−427
[30]Krstic M,Kanellakopoulos I,Kokotovic P.Nonlinear and Adaptive Control Design.New York:Wiley,1995.139−151
杂志排行

IEEE/CAA Journal of Automatica Sinica的其它文章
- Tracking Control of Leader-follower Multi-agent Systems Subject to Actuator Saturation
- Cooperative Localization of AUVs Using Moving Horizon Estimation
- Distributed Control of Nonlinear Uncertain Systems:A Cyclic-small-gain Approach
- Decentralised Formation Control and Stability Analysis for Multi-vehicle Cooperative Manoeuvre
- Distributed Self-triggered Control for Consensus of Multi-agent Systems
- An Overview of Distributed High-order Multi-agent Coordination