一种非偏置动量单飞轮加磁控制算法*
2014-05-06王献忠
王献忠,张 肖
(1.上海航天控制技术研究所,上海200233;2.上海市空间智能控制技术重点实验室,上海200233)
0 引言
利用飞轮与卫星的角动量交换进行姿态控制是三轴稳定卫星在轨运行广泛采用的一项成熟技术.长期以来诸多学者对于飞轮稳定控制问题进行了各方面的研究,但研究方向主要为三轴零动量控制和固定偏置动量控制.
零动量控制至少需要3个飞轮实现三轴姿态稳定控制[1-2],文献[1-2]对零动量控制中的解耦问题和解决方法进行了重点分析和论述.偏置动量控制可以只用一个偏置动量轮和磁力矩器实现姿态三轴稳定控制[3-4];固定偏置动量控制在卫星的-Y轴(即轨道法线方向)安装一个偏置在固定角动量的动量轮,通过偏置动量定向性产生的陀螺罗盘效应,使偏航误差随卫星在轨道上的运动耦合为滚动误差,从而只需要对滚动和俯仰姿态进行直接控制,偏航姿态就能被动保持稳定.文献[3]重点对固定偏置动量控制的安装方式和运动特点进行了分析;文献[4]同样研究了固定偏置动量控制,重点对误差源及如何提高控制精度进行了分析和讨论.
针对一般零动量控制需要多个飞轮及偏置动量控制受飞轮安装限制的问题,本文对非偏置轴安装的单个反作用飞轮加磁控实现非偏置动量卫星三轴稳定控制研究,仿真结果表明在多个飞轮故障只有一个可用飞轮情况下仍可实现稳定控制,提高了飞轮控制的可靠性.
1 动力学方程
卫星刚体动力学模型[5-6]如下:

式中,I是卫星本体的转动惯量,ω为卫星本体坐标系相对惯性空间的角速度,H为飞轮角动量,Tc为姿控力矩(本文中指磁控力矩),Td为干扰力矩.
2 地磁场模型
北东地坐标系下三轴地磁场可近似为

式中,r为地心距,Re为地球半径,
根据北东地坐标系下三轴磁场强度可计算出卫星本体下三轴磁场强度,定义为

式中,Bx、By、Bz为磁场强度三轴分量.
3 控制器设计
3.1 单飞轮安装方式
飞轮安装方式如图1所示.
飞轮角动量在XZ平面上的投影与X轴夹角为α,角动量与XZ平面上投影的夹角为β,则星体角动量 H 在三轴的分量Hx、Hy、Hz为


图1 飞轮安装示意图Fig.1 Diagrammatic sketch of wheel installation
其中h为飞轮角动量.
3.2 俯仰姿态控制算法设计
设滚动、俯仰、偏航三轴姿态角分别为φ、θ、ψ,滚动、俯仰、偏航三轴姿态伪速率为,俯仰姿态基于X轴和Z轴磁力矩器控制.
X轴磁控电流Mxc如下:

式中ky1和ky2为磁控系数.
Z轴磁控电流Mzc如下:

式中ky3和ky4为磁控系数.
3.3 滚动和偏航姿态控制算法设计
滚动和偏航姿态控制算法设计时存在两种情况:1)飞轮用于X轴姿态控制;2)飞轮用于Z轴姿态控制.
(1)如果|Bx|≥|Bz|
此时飞轮控制X轴姿态,Y轴磁力矩器控制Z轴姿态,控制算法如下:

式中,kpx、kix、kdx为轮控PID参数,kz1、kz2为磁控系数,Myc为Y轴磁控电流.
飞轮的角动量h为

(2)如果|Bx|<|Bz|
此时飞轮控制Z轴姿态,Y轴磁力矩器控制X轴姿态,控制算法如下:


式中,kpz、kiz、kdz为轮控PID参数,kx1、kx2为磁控系数.
飞轮的角动量h为

Bx、Bz磁场强度要考虑磁滞区,防止测量误差导致往复切换;X轴、Y轴和Z轴磁控磁矩与飞轮的磁卸载磁矩合成后输出.
3.4 飞轮磁卸载控制算法
飞轮磁卸载控制算法如下:
式中,Mxw、Myw、Mzw为三轴磁卸载磁矩,kw为磁卸载系数.
3.5 飞轮控制干扰力矩分析及磁控抑制
Y轴姿态可以通过X轴和Z轴磁力矩器控制,不需要轮控,因此图1中的β=0,即飞轮安装在XZ平面内.
由式(6)可知,飞轮对X轴控制时对Z轴的角动量分量为

相应的干扰力矩为

由式(6)可知,飞轮对Z轴控制时对X轴的角动量分量为

相应的干扰力矩为

飞轮在XZ平面内斜装,在对X轴或Z轴姿态进行主动控制时对Z轴或X轴产生干扰,此干扰需要Y轴磁力矩器磁控抑制.
近地轨道地磁场三轴分量在轨道系下可近似表示为

式中,Bxm、Bzm分别为轨道系下X向和Z向地磁场正余弦变化的幅值,u为卫星纬度幅角.
根据国际地磁参考场(IGRF)数据:

对地定向时Y轴磁矩输出My对X轴和Z轴磁控力矩近似为

飞轮对X轴控制时Y轴磁力矩器需要抑制Z轴干扰力矩Tzw,那么Z轴需产生的磁控矩Tzm为

由式(17)、(23)和式(24)得出飞轮对X轴控制时Y轴磁力矩器抑制飞轮对Z轴干扰力矩的控制磁矩:

飞轮对Z轴控制时Y轴磁力矩器需要抑制X轴干扰力矩Txw,那么X轴需产生的磁控矩Txm为

由式(19)、(22)和式(26)得出飞轮对Z轴控制时Y轴磁力矩器抑制飞轮对X轴干扰力矩的控制磁矩:

3.6 工程中常用飞轮安装方式
飞轮在工程应用中常采用三正交安装加一斜装方式,当飞轮仅沿滚动或偏航正装时飞轮只能对X轴或Z轴控制.
3.6.1 沿滚动轴正装
飞轮沿滚动轴正装时飞轮控制滚动姿态,磁力矩器控制偏航姿态.
如果|Bx|≥|Bz|,则Y轴磁力矩器磁控算法如式(10)所示.如果|Bx|<|Bz|,则Y轴磁力矩器磁控算法如下:

式(28)计算的Y轴磁矩对X轴产生干扰力矩如下:

飞轮控制抑制干扰力矩,在X轴产生角动量Hx如下:

设卫星轨道角速率为-ω0,Hx通过轨道运动对偏航姿态的力矩为

3.6.2 沿偏航轴正装
飞轮沿偏航轴正装时飞轮控制偏航姿态,磁力矩器控制滚动姿态.
如果|Bz|≥|Bx|,则Y轴磁力矩器磁控算法如式(13)所示;如果|Bz|<|Bx|,则Y轴磁力矩器磁控算法如下:

式(32)计算的Y轴磁矩对Z轴产生干扰力矩如下:

飞轮控制抑制干扰力矩,在Z轴产生角动量Hz如下:

Hz通过轨道运动对滚动姿态的力矩为

3.7 精度分析
角动量累积需要一定的时间,且受干扰力矩影响,通过轨道运动耦合间接控制姿态存在一定的滞后,从而影响姿态控制精度,这种控制方式适用于多个飞轮故障下安全控制模式.
4 仿真验证
卫星质量为1 200 kg,太阳同步晨昏轨道,轨道高度为600 km,三轴主惯量分别为1 000 kg·m2、1 100 kg·m2、700 kg·m2.采用 15 N·m·s 反作用飞轮,45 A·m2磁力矩器三轴分别加1 g·cm干扰力矩.为了提高飞轮控制可靠性,卫星上常安装4个飞轮其中3个飞轮沿星体三轴正装,另外一个飞轮斜装作为备份;若仅沿Y轴正装飞轮可用时采用常规固定偏置动量控制,因此本文对可用飞轮仅沿滚动轴正装、沿偏航轴正装和在XZ平面斜装3种方式进行仿真验证.
4.1 沿滚动轴正装
当其他方向飞轮异常,仅沿滚动轴正装飞轮可用时姿态控制精度曲线如图2所示,姿态控制精度约为 1°.

图2 单个飞轮沿滚动轴正装姿态控制精度曲线Fig.2 Control accuracy curves with one wheel installed on the roll axis
4.2 沿偏航轴正装
当其他方向飞轮异常,仅沿偏航轴正装飞轮可用时姿态控制精度曲线如图3所示,姿态控制精度约为 2°.

图3 单个飞轮沿偏航轴正装姿态控制精度Fig.3 Control accuracy curves with one wheel installed on the yaw axis
4.3 在XZ平面斜装
当其他方向飞轮异常,仅在XZ平面斜装飞轮可用时,姿态控制精度曲线如图4所示,姿态控制精度约为 0.3°.
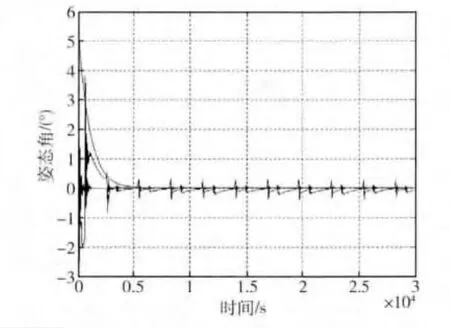
图4 单个飞轮斜装方式姿态控制精度曲线Fig.4 Control accuracy curve with one skewed-installation wheel
5 结论
本文对仅单个反作用飞轮分别沿滚动轴正装、沿偏航轴正装、XZ平面斜装方式设计了飞轮加磁控算法;并对控制耦合及抗干扰性能进行了分析.仿真结果表明仅用单个反作用飞轮加磁控可以实现非偏置动量卫星三轴稳定控制,其中仅沿X轴正装时姿态控制精度约为1°,仅沿Z轴正装时姿态控制精度约为2°,仅在XZ平面斜装时姿态控制精度约为0.3°,即当仅有一个非偏置飞轮可用且斜装时的控制精度要优于沿星体轴正装.
本文提出的控制算法解决了一般零动量控制要求至少配置3个飞轮,固定偏置动量控制飞轮安装受限的问题,适合卫星上多个飞轮故障情况下应用,或纳星、皮星等由于布局或重量原因不能安装多个飞轮的微小卫星上的应用.
[1]李鹏奎,钱山,郭才发,等.零动量轮卫星姿态控制系统研究[J].中国空间科学技术,2009,29(2):25-32.LI P K,QIAN S,GUO C F,et al.Research on satellite attitude control problems of zero-momentum reaction wheel system[J].Chinese Space Science and Technology,2009,29(2):25-32.
[2]田春华,马广富,李传江,等.三轴稳定卫星姿控系统的一般性问题[J].自动化技术与应用,2001,20(1):9-12.TIAN C H,MA G F,LI C J,et al.The ordinary problems about attitude control of three-axis stabilization satellite[J].Techniques of Automation and Applications,2001,20(1):9-12.
[3]柯旗,王勇,魏春岭.一种在轨改善偏置动量卫星控制精度的方法[J].空间控制技术与应用,2011,37(4):41-44.KE Q,WANG Y,WEI C L.A way to improve attitude control accuracy for momentum biased satellite[J].Aerospace Control and Application,2011,37(4):41-44.
[4]刘新彦,严拱添.偏置动量卫星姿态运动特点及其控制[J].控制工程,1999,6:8-15.LIU X Y,YAN G T.The movement characteristic and control of momentum biased satellite[J].Control Engineering of China,1999,6:8-15.
[5]章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,2006:150-155.
[6]屠善澄.卫星姿态动力学与控制[M].北京:宇航出版社,2002:32-37.