基于PWM_ON_PWM调制方式的控制力矩陀螺框架电机驱动控制*
2014-05-06胡跃伟田利梅武登云
胡跃伟,鲁 明,田利梅,武登云
(北京控制工程研究所,北京100190)
0 引言
控制力矩陀螺CMG(control moment gyroscope)是空间站等长期运行的大型航天器实现姿态控制的关键执行机构.
控制力矩陀螺框架转速的控制精度是控制力矩陀螺产品最关键的指标之一,直接影响着控制力矩陀螺整机的输出力矩精度.针对无刷直流电机间接驱动的单框架控制力矩陀螺,无刷电机换相转矩波动是影响框架控制精度的一个主要影响因素.
控制力矩陀螺框架驱动采用全桥电路,一般为三相六状态120电角度导通方式,而不同的脉宽调制方式,对系统转矩波动的影响各不相同.文献[1]从换相期间转矩波动量的角度,分析了4种PWM调制方式对电磁转矩的影响,得出PWM_ON方式换相转矩波动最小,但是其只是近似计算,也没有明确其适用条件;文献[2-3]从非换相期间反电势电流脉动的角度,分析了4种PWM调制方法对合成电磁转矩的影响,得出ON_PWM调制方式下,脉动电流最小,但其没有进一步提出改进措施;文献[4-5]从消除非换相期间非导通相反电势电流续流的角度,提出PWM_ON_PWM调制方式鉴于目前多是从单一角度对不同PWM方式进行对比分析,本文从换相转矩波动,非换相期间转矩脉动以及应用改进对不同脉宽调制方式进行研究分析,得出适合控制力矩陀螺框架驱动系统的最佳方式.
1 不同调制方式对换相转矩波动的影响
本节主要分析不同脉宽调制方式下,对换相转矩波动量的影响.脉宽调制方式采用H_PWM_L_ON、H_ON_L_PWM、PWM_ON、ON_PWM 以及 PWM_ON_PWM五种单管调制的方法,为叙述方便依次以方式1~5表示.不同调制方式下,电机驱动电路关断相的续流过程不同,在上桥换相时,方式1和方式3续流过程相同,方式2和方式4续流回路相同;在下桥换相时方式1和方式4续流过程相同,方式2和方式3续流过程相同;对比换相期间的续流过程,方式5与方式3完全相同.
上桥换相时,以方式5-PWM_ON_PWM为例,假设驱动电路中V1关断,V3开通且为PWM调制,V6状态不变为恒通,A相电流经V6、D2进行续流,功率管V3开通、关断时驱动电路电流回路分别如图1、2所示.
此时框架驱动电机电压平衡方程为
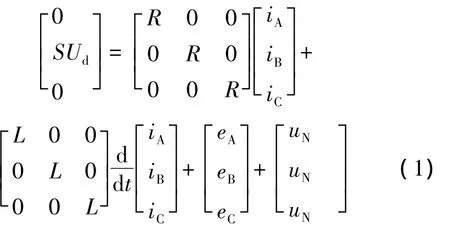
式中,Ud为驱动电路电源电压;e为各相反电势;i为各相电流;uN为电机中线电压;R为电机绕组相电阻;L为电机绕组电感;S为功率管的开关状态,S=1时V3导通,S=0时V3关断.
在电机换相过程中,电机各相电流iA+iB+iC=0,由电压平衡方程整理可得,电机中线电压

图1 V3导通时电流回路Fig.1 The current loop with V3 conduction
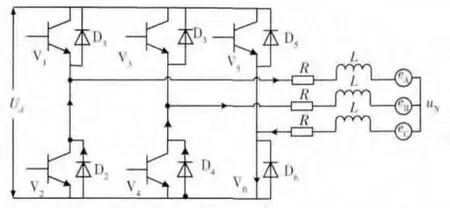
图2 V3截至时电流回路Fig.2 The current loop with V3turning off
无刷电机反电势和相电流的关系如图3所示,在功率管V3,V6工作区间内,eB=-eC=E,而eA是一个斜坡函数,由于换相过程很短,可令eA=E,如此,电机中点电压可简化为

式中:E为反电势有效值;D为脉宽调制的占空比.

图3 无刷电机反电势和相电流的关系Fig.3 The relationship between electromotive force and phase current of BLDC
将式(3)代入电机电压平衡方程可得各相电流变化率,I为电机电流有效值,
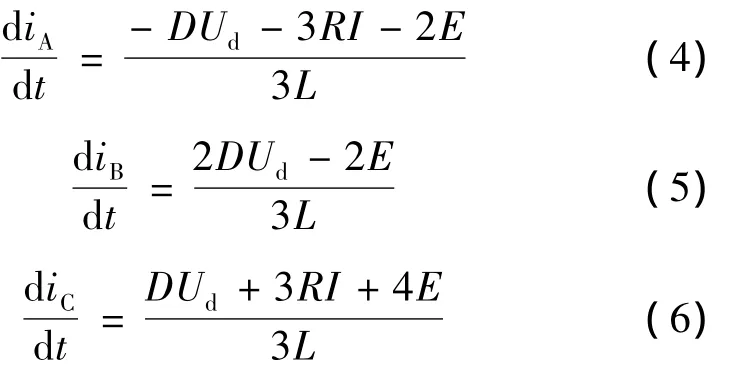
由电机统一理论得到无刷电机的电磁转矩为

式中:np为电机极对数;ω为电机电角速度;I为电机电流有效值.
则换相期间无刷电机电磁转矩为

由式(8)可看出,换相期间电磁转矩波动量的大小与电机转速、负载电流(I)和控制方法(占空比D,换相时间t)有关,通过以上3个方面的调节可以调整转矩波动的幅值.实际中,通常由于续流过程和开通延迟会造成换相期间电磁转矩的波动,即T<Tem.故在相同的控制方法和相同的工作状态下,对不同脉宽调制方式进行比较,如表1所示.
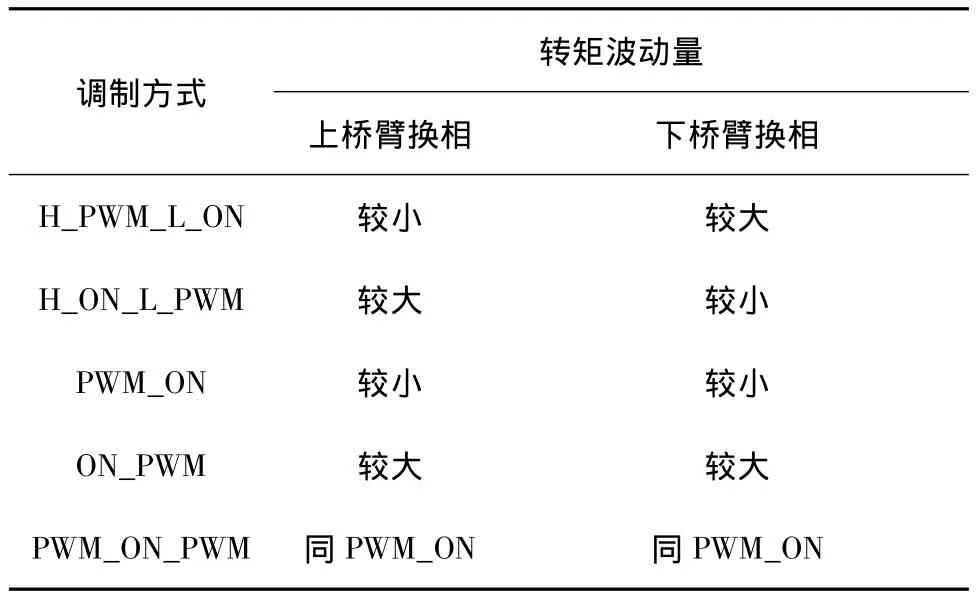
表1 脉宽调制方式对转矩波动的影响Tab.1 Influences of different PWM modes on torque ripple
在上桥臂换相过程中,调制方式PWM_ON型和H_PWM_L_ON型的转矩波动量要比ON_PWM型和H_ON_L_PWM型调制方式小.在下桥臂换相过程中,调制方式PWM_ON型和H_ON_L_PWM型的转矩波动量要比ON_PWM型和H_PWM_L_ON型调制方式小.所以在5种调制方式中,PWM_ON型和PWM_ON_PWM型换相转矩波动量最小.
2 非换相期间不同调制方式反电势电流脉动
实际上,PWM调制方式对非导通相也会产生影响.主要表现在非导通相可能产生脉动电流,该脉动电流的出现,会参与到电磁转矩的合成中去,造成非换相期间电磁转矩脉动.
如图3所示,A相绕组在一个电周期内非导通区间有[120°,150°],[150°,180°],[300°,330°],[330°,360°].A 相绕组非导通区间内三相绕组端电压的表达式为
式中,SB=1表示B相上桥臂工作,SB=0表示B相绕组下桥臂工作.SC对应C相绕组的工作状态.
由图3可知,在A相的非导通区间内eB=-eC,iB+iC=0,整理可得,电机中点电压

根据SB,SC的不同状态可得,

当A相电压uA>Ud或者uA<0时,在A相即会产生高频的脉动电流,不同的调制方式时,电机中性点电压不同,以ON_PWM调制方式为例进行详细分析.
[120°,150°]区间,如图 3 所示,A 相反电势满足0<eA<0.5Ud,在 ON_PWM 方式下,V6进行PWM调制,即SC=1或0;V3恒通,即SB=1,此时,uN取值为0.5Ud或Ud,故在此区间会出现uA>Ud的情况,A相绕组中会产生负的脉动电流,同理可对其他三个区间进行分析,结果见表2.
可对方式1~3的反电势电流进行分析,总结如表2所示,PWM_ON_PWM调制方式是功率开关管在开通前30°和后30°期间进行脉宽调制,中间60°区间保持恒通.其实际是ON_PWM方式和PWM_ON方式的结合,在截至相反电势大于零时,上桥臂功率管脉宽调制,下桥臂功率管恒通,即为PWM_ON方式,反电势小于零时,下桥臂功率管脉宽调制,上桥臂功率管恒通,即为 ON_PWM方式.从表2可见这样就可以保证整个截至区间内,A相端电压不会超过直流母线的电压,也不会低于零电压,完全消除了截至相脉动电流的产生,而方式1~4都会在非导通相中产生脉动电流,进而影响电磁转矩的稳定性,且是脉宽调制方式所固有的,无法消除.
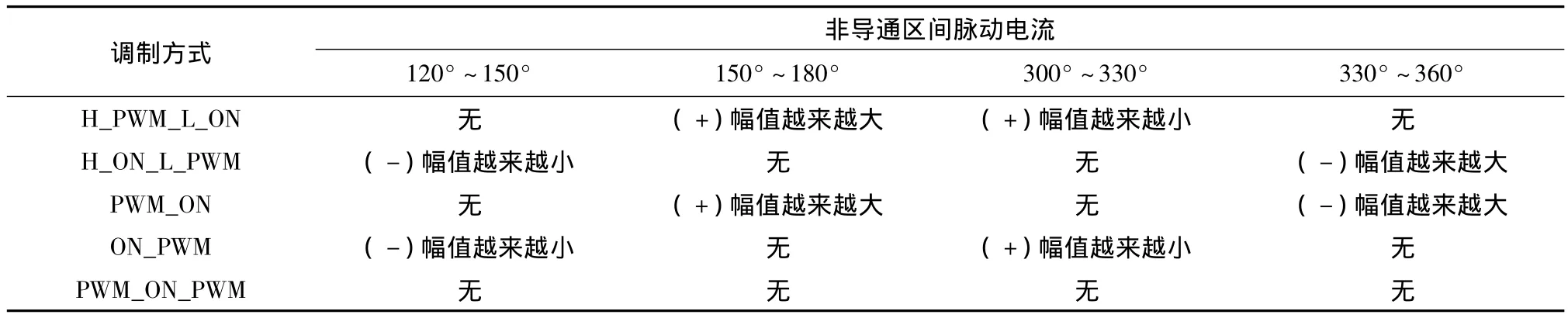
表2 不同调制方式对脉动电流的影响Tab.2 The different influences of different PWM modes on ripple current
3 应用改进
从第1节的分析可见,PWM_ON_PWM调制方式在换相期间对电磁转矩的影响与PWM_ON方式相同,其电磁转矩波动量在所有的脉宽调制方式中也是最小的.
从第2节分析可见,PWM_ON_PWM调制方式在整个非导通区间内都不会产生反电势电流,明显优于其他4种调制方式,非换相期间引发的转矩脉动最小.
PWM_ON_PWM调制方式的缺点是传统的三路霍尔位置传感器通过逻辑变换只能得到6个对应的换相信号,无法满足其每隔30电角度即变换一次状态的换相要求,需要再增加三路位置传感器,如此电机系统将变得复杂,成本也会提高.为了获得位置精度,可以选用光电码盘或者旋转变压器作为位置检测的部件.控制力矩陀螺框架机构通过旋转变压器可以获得精确的位置信息,所以,可在不增加系统复杂性的基础实现此脉宽调制方式.
4 仿真验证
用Matlab/Simulink软件对框架全桥驱动系统进行仿真,系统采用相同速度电流双闭环控制方法,且控制系统负载相同,使电机的工作相电流相等,以保证不同调制方法的可对比性.5种调制方式下,电机A相电流的仿真结果如图4~图8所示.
从图6可见,脉宽调制方式4在上下桥臂换相时,电流波动量都是最大的,从图7和8可见方式3、方式5在上下桥臂换相时,电流波动量都是最小的,其波动量要比方式4小20%,方式1和方式2只能在上桥臂或者下桥臂换相时保证电流波动量较小,与本文的分析结果相同.
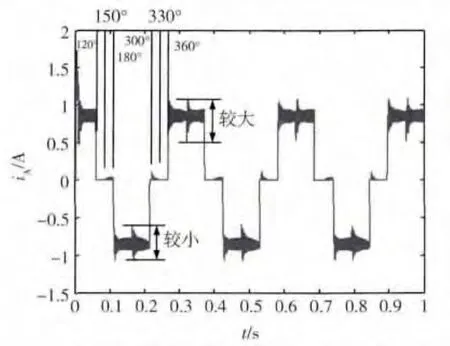
图4 H_PWM_L_ON方式下A相电流Fig.4 The current of phase A on H_PWM_L_ON mode
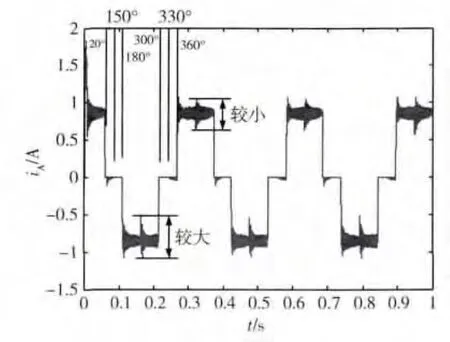
图5 H_ON_L_PWM方式下A相电流Fig.5 The current of phase A on H_ON_L_PWM mode

图6 ON_PWM方式下A相电流Fig.6 The current of phase A on ON_PWM mode
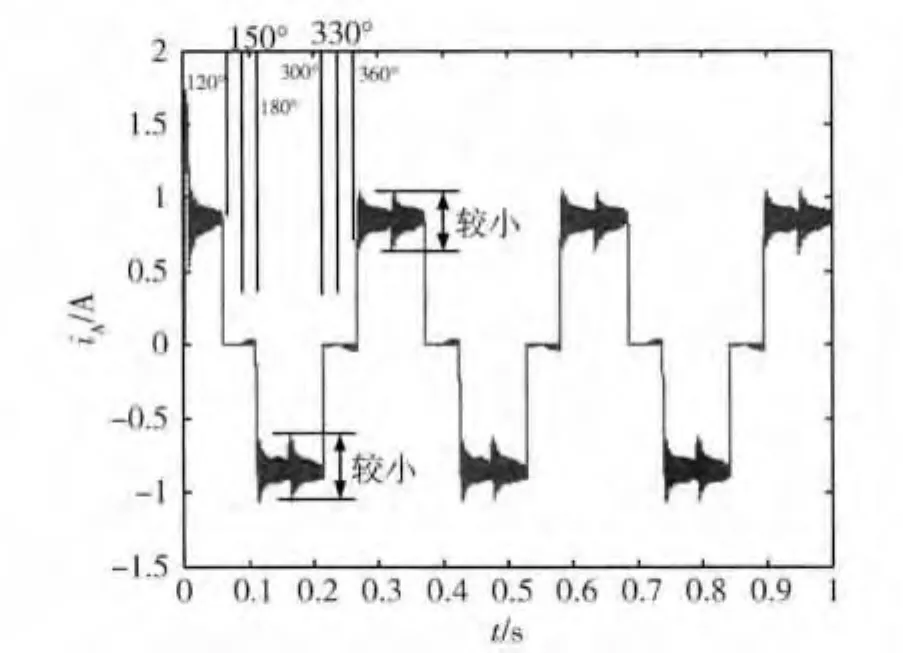
图7 PWM_ON方式下A相电流Fig.7 The current of phase A on PWM_ON mode
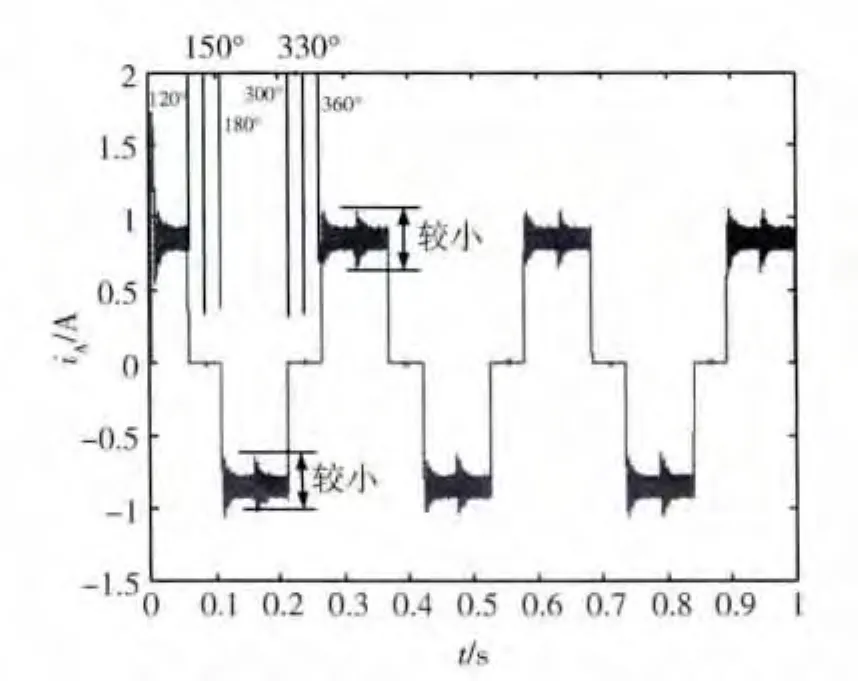
图8PWM_ON_PWM方式下A相电流Fig.8 The current of phase A on PWM_ON_PWM mode
从图4~7可见,在A相电流截至时,方式1~4均不可避免的出现电流脉动的现象,且电流脉动的大小和出现时刻与第三节分析结论完全相同,从图8可见方式5不存在相电流截至时电流脉动的现象.
综合仿真结果,PWM_ON_PWM方式换相时转矩波动量最小,非换相时截至相不会出现脉动电流,所以此调制方式要优于其他四种调制方式.
5 结论
本文以控制力矩陀螺框架电机的驱动电路的调试方法出发,从多个方面分析了不同脉宽调制方式的优劣,分析及仿真结果表明,采用PWM_ON_PWM方式的转矩脉动最小,电机运行的平稳性最优,适用于控制力矩陀螺框架系统的高精度控制要求.
[1]张相军,陈伯时.无刷直流电机控制系统中PWM调制方式对换相转矩波动的影响[J].电机与控制学报,2003(6):87-91.ZHANG X J,CHEN B S.The different influences of four PWM modes on commutation torque ripples in brushless DC motor control system[J].Electric Machines and Control,2003(6):87-91.
[2]张激扬,周大宁,高亚楠.控制力矩陀螺框架控制方法及框架转速测量方法[J].空间控制技术与应用,2008,34(2):23-28.ZHANG J Y,ZHOU D N,GAO Y N.Gimbal control technique and gimbal rate measurement method for the control moment gyro[J].Aerospace Control and Application,2008,34(2):23-28.
[3]堵杰,孙承波,陈国呈.无刷直流电动机换相过程中续流对电压和电流的影响[J].电工技术杂志,2002(3):5-8.DU J,SUN C B,CHEN G C.Analysis of influence of commutation freewheeling on the voltage and current of BLDCM[J].The Magazine of The Power Technology,2002(3):5-8.
[4]鲁明,李耀华,张激扬,等.控制力矩陀螺框架伺服系统的超低速测速方法[J].中国惯性技术学报,2012,20(2):234-238.LU M,LI Y H,ZHANG J Y,et al.Ultra-low speed detection method for CMG gimbal servo systems[J].Journal of Chinese Inertial Technology,2012,20(2):234-238.
[5]韦鳃,胡长生,张仲超.一种新的消除无刷直流电机非导通相续流的PWM调制方式[J].中国电机工程学报,2005(7):104-108.WEI K,HU C S,ZHANG Z C.A novel pwm schemeto eliminate the diode freewheeling of the inactive phase in BLDC motor[J].Proceedings of the CSEE,2005(7):104-108.
[6]夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.
[7]周波,窦森,严仰光.电子变换器调压的无刷直流发电机PWM控制模式及其对电压脉动的影响[J].中国电机工程学报,2001,21(7):56-60.ZHOU B,DOU S,Yan Y G.PWM control modes their influence on voltage fluctuation for the brushless DC generators based on electronic converter[J].Proceedings of the CSEE,2001,21(7):56-60.