基于智能滑模观测器的PMLSM调速系统研究
2014-04-28王辉马军刘红霞
王辉,马军,刘红霞,2
(1.郑州轻工业学院机电工程学院,河南郑州 450002;2.信阳工业学校,河南信阳 465150)
基于智能滑模观测器的PMLSM调速系统研究
王辉1,马军1,刘红霞1,2
(1.郑州轻工业学院机电工程学院,河南郑州 450002;2.信阳工业学校,河南信阳 465150)
针对由于传统滑模观测器存在而引起系统抖振较大的问题,设计了一种可在线学习BP神经网络滑模观测器,以减小系统抖振和提高永磁直线电机伺服控制系统的性能。通过设计滑模观测器进行电流估计,获得反电势大小;将BP神经网络与传统滑模观测器相结合,并将电机定子电流估计值与实测值间的误差作为性能指标函数,实现权值的在线学习,达到滑模观测器增益参数最优化自整定目的;引入锁相环技术达到对电机动子位置和速度的辨识。仿真实验结果表明,基于BP神经网络的滑模观测器能够实现对电机动子位置和速度的准确观测,且系统响应快速,稳态精度高。
永磁直线同步电机;滑模观测器;BP神经网络;锁相环
1 引言
动子位置的精确检测是实现永磁直线电机高性能伺服控制的重要条件,传统的检测方法主要通过光栅尺等机械式传感器。虽然传统的检测方法原理简单,但制造工艺复杂,增加了系统成本和维护费用,同时也降低了系统的可靠性,进而影响了永磁直线电机的微型化,在一定程度上限制了永磁直线同步电机的应用[1]。
无位置传感器检测与控制技术则不需要机械式传感器,有利于改善永磁同步电机驱动系统可靠性,并可减少系统成本,降低运行环境要求,具有重要研究意义[2-3]。目前,主要检测方法有:基于数学模型的开环估计法、高频信号注入法、模型参考自适应控制、状态观测器法、以及卡尔曼滤波器等[4-5]。作为常用的一种状态观测器,虽然滑模状态观测器能够实现对电机转子位置的无传感器检测,但由于IGBT等功率器件的高频开关及实际应用中干扰的存在,这均使得系统存在严重的抖振现象,同时反电势是通过低通滤波器环节对高频信号进行滤波得到的,这样就存在相位延迟,所以需要相位补偿环节,这样影响了控制系统的精度,增加了能耗和系统的复杂性[6-7]。
为减小抖振的影响,提高系统的综合性能,本文将神经网络引入系统,实现对滑模观测器参数的自调节,利用锁相环技术观测永磁直线电机动子位置和速度,以实现对永磁直线电机的精确控制。
2 滑模观测器设计
电机运行时,定子电压与电流是可测量量,因此可把定子电压与电流作为观测器的输入项,以电机实际模型作为参考模型,而利用滑模理论建立的观测器模型则作为可调模型,利用观测器估算出电流值,与测量电流值进行比较。通过不断调整滑模控制输入量的值,使得实际电流测量值与估计值间的误差最小,这时的控制输入量即为反电势的大小。
2.1 滑模观测器模型
为便于设计滑模观测器,永磁直线电机在α-β坐标系下的定子电压方程为[8-9]

则电流状态方程为

将定子电流作为观测量,根据滑模变结构理论,滑模观测器模型为

式(3)减去式(2)可得电流误差方程为

选择滑模面,令s=es,根据滑模控制理论的控制量求解方法,可得出

2.2 位置与速度估计
根据文献[10],K的取值要大于2个轴上反电势的最大值。由于反电势中包含有动子位置信息,但是由于切换函数的高频切换,观测器估算出来的反电势中包含有大量高频分量,虽然通过一个低通滤波器可以滤除部分高频成分,但最终估算出的反电势中还会存在部分高频分量,如果采用直接计算的方法,则结果中将会引入高频噪声,导致检测结果不精确。借助于通信系统中的外差法,并利用锁相环技术,则可减少高频噪声影响。
假设锁相环输出的被估算动子位置电角度为θ^e,则令

当Δθe足够小时,则式(6)可近似变为

于是利用锁相环可估算出动子的位置。基于锁相环的动子位置估计原理图如图1所示。
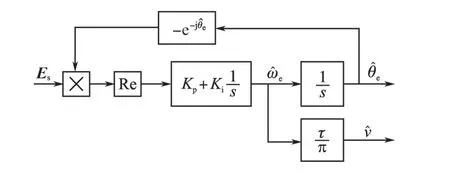
图1 基于锁相环的动子位置估计原理图Fig.1 The principle diagram of mover position estimation based on PLL
3 滑模观测器的神经网络控制
在式(5)中,K值大小主要影响趋近速度和抖振幅值,通常希望在距离切换面较远时,K取较大的值,以增加到达滑模面的速度,而当接近切换面时,K取较小的值,以减小抖振影响,提高系统控制精度。这就需要系统能够根据系统运动状态,对K值进行动态调整。本文通过引入神经网络进行滑模控观测器的参数自整定,以提高观测精度。基于神经网络的滑模观测器原理见图2。

图2 基于神经网络滑模观测器原理图Fig.2 The principle diagram of SMO based on the neural network
图2中BPNN为神经网络控制模块,分别将实际电流、估计电流及它们的误差作为神经网络的输入,输出为滑模增益K,具体算法如下。
1)输入层。输入层神经元的输出等于输入,即

式中:(k)为各输入层神经元的输出,其中,上标I表示输入层,下标i表示所在层神经元的位置;xi(k)为输入层所包含神经元的输入,即:x(k)=[x1(k)x2(k)x3(k)1],k为当前时刻。
2)隐含层。隐含层各神经元的输入和输出为


3)输出层。输出层各神经元的输入和输出为

式中:上标O表示输出层;HO表示隐含层与输出层间关系;下标j表示隐含层第j个神经元;N为隐含层神经元的个数;φ[INO(k)]为输出层神经元的激活函数,取φ(k)=[1+tanh(k)]/2。
为实现滑模观测器参数的最优自整定,BP神经网络需利用误差反传的方法,达到权值自调整。将电流实际测量值与观测器的观测值之间的误差作为误差性能函数,则α坐标轴上的电流误差性能函数为

则性能函数对权值的导数为
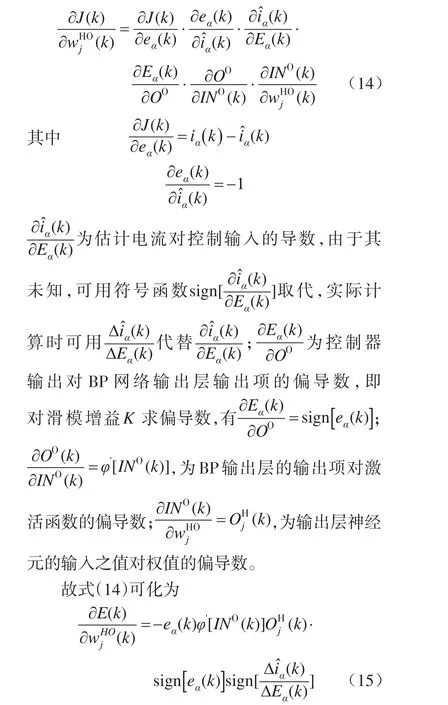
根据delta法则,并考虑动量项的影响,应用于输出层权值调整的学习算法为

式中:η为学习速率;α为动量因子。
隐含层权值调整学习算法为

β坐标轴上的电流观测器的滑模增益调节算法与α坐标轴类似,这里不再重复分析。
4 仿真与结果分析
为验证基于神经网络的滑模观测器性能,对该观测器进行仿真研究,永磁直线同步电机的主要参数为:电感L=Ld=Lq=0.002 67 H,动子质量m=28 kg,电阻R=2.65 Ω,定子永磁体磁链Ψr=0.303 03 Wb,极距τ=0.016 m。图3为永磁直线同步电机无传感器矢量控制原理图,电流环和速度环均采用PI控制器,速度环反馈所需的速度值则通过基于神经网络的滑模观测器进行估算获得。
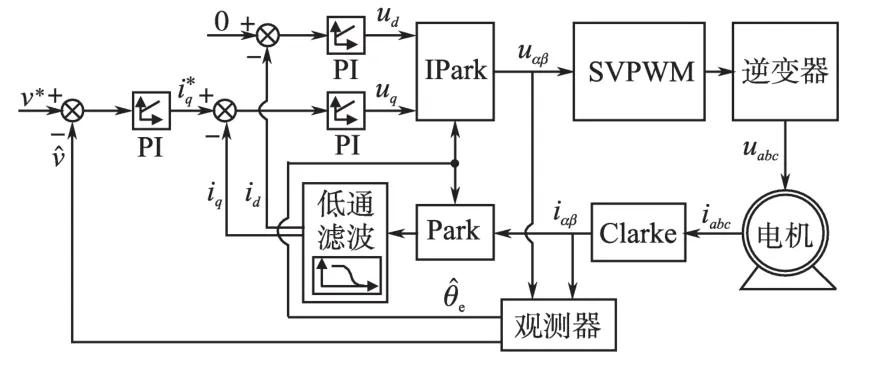
图3 无传感器矢量控制原理图Fig.3 The principle diagram of the sensorless vector control
在给定速度下,分别对空载和加载两种情况进行仿真研究,结果如图4、图5所示。

图4 空载时的响应曲线Fig.4 The response curves under no load condition
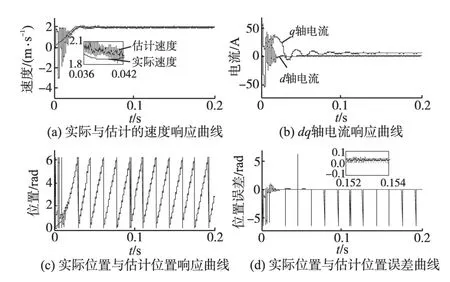
图5 加载时的响应曲线Fig.5 The response curves under load condition
从图4图5中可知,无论是空载还是加载条件下,速度响应曲线都能在很短时间内到达设定值;在过渡过程,观测器估算出的速度值经过短暂的调整后,很快就能跟踪上电机速度实测值;由于切换函数的存在,观测器估算出的速度值存在一定的抖振。从dq轴电流响应曲线可以看出,稳态时d轴电流接近零值,符合d轴电流为零的矢量控制策略;而在加载条件下,q轴电流保持一定的电流值。从位置响应及其误差曲线可知,在两种条件下,观测器估计值都能很好地跟踪实测值,且误差较小。
5 结论
本文针对有传感器永磁直线同步电机调速系统的缺陷,将神经网络与滑模观测器相结合,利用神经网络实现对滑模增益的自整定,以提高传统滑模控制算法的收敛速度,减小抖振,提高精度。仿真实验结果表明,本文提出的基于神经网络滑模观测器无传感器矢量控制系统,响应速度快,稳态精度高,观测器能很好地实现对电机速度和位置的跟踪。
[1] 王辉,王长松,钟黎萍,等.基于滑模观测器的永磁同步电机低速下无传感器转子位置检测的研究[J].微电机,2011,44(1);61-64.
[2] Raggl K,Warberger B,Nussbaumer T,et al.Robust Angle-sensorlessControlofaPMSMBearinglessPump[J].IEEETrans-actions on Industrial Electronics,2009,56(6):2067-2085.
[3] 王高林,张国强,贵献国,等.永磁同步电机无位置传感器混合控制策略[J].中国电机工程学报,2012,32(24):103-111.
[4] 纪历,徐龙祥.基于假定旋转坐标的高速永磁同步电机无传感器控制[J].电工技术学报,2012,27(11):55-62.
[5] 王杰,欧阳红林,张鹏,等.凸极式永磁同步电机无速度传感器控制[J].电力电子技术,2011,45(10):122-124.
[6] 朱喜华,李颖晖,张敬.基于一种新型滑模观测器的永磁同步电机无传感器控制[J].电力系统保护与控制,2010,38(13):6-11.
[7] 陈长龙,樊贝,胡堃.永磁同步电动机新型滑模观测器无传感器控制[J].微特电机,2013,41(3):44-47.
[8] 郭庆鼎.直线交流伺服系统的精密控制技术[M].北京:机械工业出版社,2000
[9] 舒志兵,翟正磊,章杰,等.基于滑模观测器的PMSM无传感器控制[J].电气传动,2012,42(11):7-10.
[10]贺建军,段勇,喻寿益.基于滑模观测器的SPMSM位置速度估计[J].控制工程,2012,19(3):527-530.
修改稿日期:2014-03-14
Research of Speed Regulating System Based on Intelligent SMO for PMLSM
WANG Hui1,MA Jun1,LIU Hong-xia1,2
(1.Mechanical and Electrical Engineering Institute,Zhengzhou University of Light Industry,Zhengzhou450002,Henan,China;2.Xinyang Industrial School,Xinyang465150,Henan,China)
For reducing the chattering phenomenon generated by the conventional sliding mode observer(SMO),a new SMO based on the BP neural network was designed to improve the servo control system performance of the permanent magnet linear synchronous motor(PMLSM).A SMO was designed to estimate the stator currents to obtain the back EMF.The BP neural network was introduced into the SMO to realize the self-optimization of the SMO’s gain parameters,the error between the estimated current and measured current as the performance index function to realize the on-line weight learning.The phase locked loop technology(PLL)was applied to estimate the mover velocity and position.The simulation results show the new SMO may accurately observe the mover position and speed,and the control system has quick response and high stability accuracy.
permanent magnet linear synchronous motor;sliding mode observer;back propagation neural network;phase locked loop
TM351
A
国家科技支撑计划资助项目(2012BAF12B13);河南省重点科技攻关项目(132102110057);郑州市科技攻关项目(131PPTGG411-3);郑州轻工业学院博士科研基金资助项目(000346)
王辉(1977-),男,博士,讲师,Email:bjwh520@163.com
2013-08-05
