PMSM的线性-滑模变结构直接转矩控制研究
2014-04-28肖海峰刘海龙贺昱曜
肖海峰 ,刘海龙,贺昱曜
(1.西北工业大学航海学院,陕西西安 710072;2.西安航空学院电气系,陕西西安 710000)
PMSM的线性-滑模变结构直接转矩控制研究
肖海峰1,2,刘海龙1,贺昱曜1
(1.西北工业大学航海学院,陕西西安 710072;2.西安航空学院电气系,陕西西安 710000)
为了改善永磁同步电机直接转矩控制系统的控制性能,提出将直接转矩控制与线性-滑模变结构控制相结合的策略,分别采用转矩、磁链线性-滑模混合型控制器取代了传统直接转矩控制中的滞环或PI控制器,该控制器通过调节增益实现线性控制与滑模开关控制的平衡关系。仿真及实验结果表明,这种控制策略不仅保留了线性控制响应快的特点,同时使系统具有强的鲁棒性,减小了磁链及转矩脉动,系统的动态、静态品质优良。
永磁同步电机;线性-滑模控制;变结构控制;直接转矩控制
1 引言
永磁同步电机直接转矩控制技术是现代交流调速系统研究方向之一,各国学者对此也做了大量的研究工作[1-5]。在解决转矩、磁链脉动过大、磁链估计、低速运行精度等方面取得丰硕成果。但依然有许多需要迫切解决的问题,如控制精度要求;控制策略的鲁棒性要求等。目前,应用较为广泛的直接转矩控制主要采用滞环控制器对转矩和磁链进行调节,转矩、磁链脉动较大。
滞环控制策略在直接转矩控制中被广泛用于实现磁链、转矩的跟踪控制。然而滞环控制器的
高频开关特性,也存在转矩脉动明显的缺陷,且开关频率变化。文献[5]提出了直接转矩与空间矢量调制相结合的策略使开关频率保持恒定,降低了转矩脉动,但系统稳态特性及鲁棒性能难以满足高精度控制要求。文献[4]提出利用PI控制器得到逆变器输出电压参考矢量,PI控制器中积分项可有效提升系统稳态特性,该策略使系统具有良好的动态响应能力,但对扰动和电机参数摄动的鲁棒性不强。后来,大量非线性控制方法被引入,包括神经网络控制[6-7]、反步控制[8]、鲁棒控制[9]等。这些方法算法复杂,多需要观测器对系统状态进行观测,在反馈通道通常存在非线性项且易引入干扰。
滑模变结构控制是一种针对非线性系统的高频、高效开关控制策略,该方法通过自行设计所需的滑模面和等效控制器达到跟踪输入的目的,其控制过程不依赖于精确的系统参数,且具有良好的鲁棒性特点,已被应用到调速领域中[1-3]。然而滑模切换函数的趋近速度对系统瞬态响应影响较大,增加滑模增益可改善趋近速度,但系统抖振现象明显。
本文结合PI控制具有的良好动态特性和滑模变结构控制的强鲁棒性特点,针对永磁同步电机直接转矩控制提出一种混合型磁链、转矩控制策略,即线性-滑模变结构控制器。该控制器通过调节控制增益满足控制平衡关系,使系统在瞬态过程中的动态响应能力主要由PI控制决定,快速跟踪输入指令;而在趋于稳态时滑模控制输出决定了系统的响应特性,可以提高系统的鲁棒性。该方法不仅能够满足调速系统的暂态及稳态控制要求,且增大了调速范围,同时系统保留了传统直接转矩的动态响应能力。仿真及实验结果表明该控制策略的正确性。
2 永磁同步电机的数学模型
在d-q坐标系中,永磁同步电机的电压方程为

式中:p为微分算子;Rs为定子电阻;Ld,Lq为d,q轴电感;ωr为转子电角速度;ud,uq为d,q轴电压;id,iq为d,q轴电流;Ψf为永磁磁链。
通过坐标变换,得到αβ静止坐标系中的电压方程:
定子磁链、电磁转矩方程分别为
式中:p为极对数。
3 线性-滑模变结构控制器设计
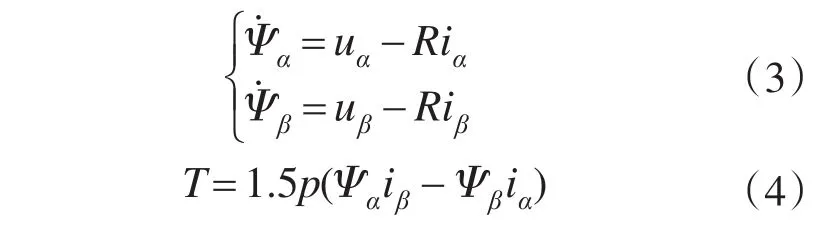
线性-滑模变结构转矩、磁链控制器结构框图如图1所示,该控制器包括开关分量和线性分量2部分。通过调节平衡增益改变PI控制与滑模变结构控制的权重关系,使该混合型控制器满足不同的运行状态。
图1 线性-滑模控制器结构Fig.1 Linear and variable-structure control block diagram
选择滑模函数S=SΨ+jST,为了使系统误差变小、转矩平滑,选用积分滑模面,取
式中:“^”为估计量;cΨ,cT为积分控制增益。
因此,在定子磁链参考坐标系下,参考电压为
式中:KP_Ψ,KI_Ψ,KP_T,KI_T分别为磁链、转矩PI调节器增益;Kvsc_Ψ,Kvsc_T为滑模控制增益。控制器的输出作为逆变器的开关依据。
1)当电机运行在暂态过程时,设线性-滑模变结构控制器满足:

则,由式(6)得控制器参考电压:
此时,控制器的输出主要由线性控制部分决定,根据线性控制的动态响应要求选择控制增益,而非线性滑模控制对电机控制系统的磁链、转矩影响较小。
2)当电机运行在稳态过程时,设线性-滑模变结构控制器满足:

则,由式(6)得控制器参考电压:
此时,控制器的输出主要由滑模控制决定,通过滑模增益的选择来改善系统的鲁棒要求,而线性控制作用对系统影响较小,因此不会由于外界扰动引起系统的不稳。根据滑模控制器设计要求,通常Kvsc_Ψ,Kvsc_T的取值尽可能大,以提高系统的抗扰动能力。
假设定子磁链和转矩能实现精确状态估计,即Ψ=Ψ^,T=T^,忽略逆变器的死区效应及定子电阻,由式(2)、式(8)、式(10)可得转矩、磁链方程:
因此,该控制器不仅具有线性控制的平滑特性,同时具有滑模控制鲁棒性强的特点,增强控制器的稳定性,减小控制策略对模型参数的依赖,使系统具有更强的抗干扰能力。
4 系统控制策略及实现
根据上述分析可以得到线性-滑模变结构直接转矩控制系统框图如图2所示,新型线性-滑模转矩、磁链调节器替代了传统的PI控制器如系统结构框图虚线部分,其输出作为直接转矩控制中的定子磁链定向及大小控制的依据。系统速度环PI调节控制器的输出作为参考转矩T*,速度给定值决定参考磁链的大小。
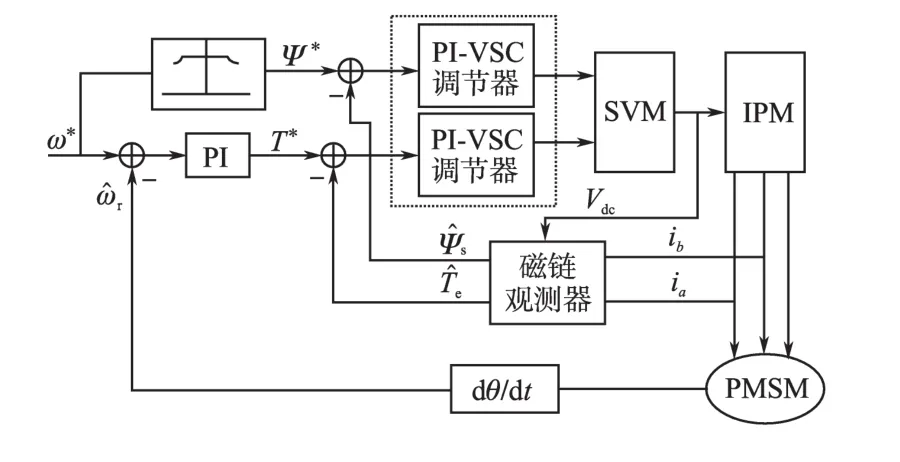
图2 线性-滑模变结构直接转矩控制系统Fig.2 Linear and variable-structure DTC system
同时,本文采用了文献[10]提出的基于滑模磁链观测技术对电机的磁链进行观测,即根据电流、电压模型分别得到静止坐标系下电流、磁链观测误差为
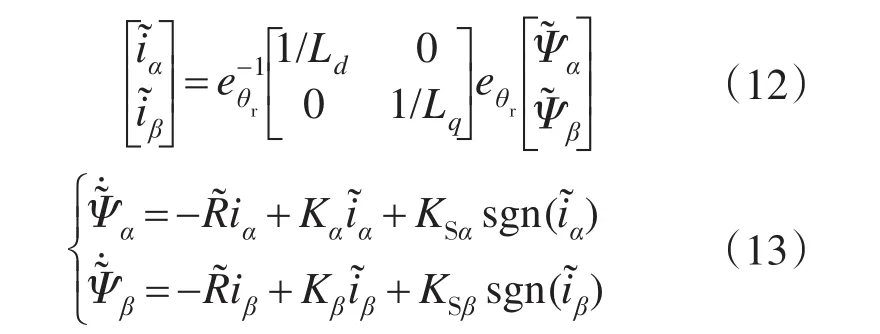
式中:R˜为定子电阻观测误差;i˜α,i˜β,Ψ˜α,Ψ˜β分别为定子电流、磁链动态观测误差。
5 仿真及实验结果分析
5.1 仿真分析
为了验证本文转矩及磁链控制器的有效性,现对交流正弦永磁同步电机控制系统采用Matlab/Simulink建立仿真模型,其电机参数如下:额定功率Pn=1.5 kW;绕组电感Ld=0.33 mH,Lq=0.48 mH;额定转速2 500 r/min;电枢电阻R=0.024Ω;转动惯量J=0.25 kg·m2;极对数p=4;粘滞摩擦系数B=0.000 1 N·m·s;逆变器开关频率为15 kHz。
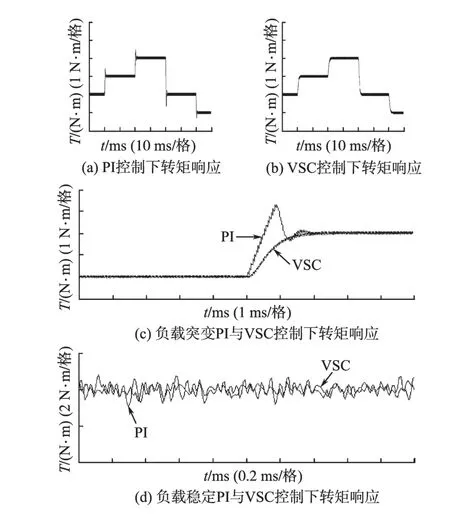
图3 PI控制、滑模控制下的转矩响应波形Fig.3 The response of torque with PI control and sliding-mode control respectively
图3为系统分别采用PI控制和滑模控制策略对比仿真波形,根据负载突然变化时的动态响应仿真结果表明:如图3a,图3b,PI控制器具有快速的动态响应能力,但该控制策略下的转矩响应略有超调,且随负载变化率的增大而增大;而采用滑模控制器的转矩响应具有较强的鲁棒性,在负载突变下,其响应略有滞后。见图3c,负载转矩从1 N·m增加到3 N·m时,PI控制下电磁转矩输出达到负载转矩响应时间小于0.5 ms,滑模控制响应时间至少需要约1 ms。在稳态时,滑模控制策略输出转矩脉动相对小,如图3d所示。
图4a,图4b分别为不同控制策略下突变负载对应的电流响应曲线,PI控制输出电流响应快,同时伴有超调现象,而滑模控制输出电流响应滞后时间长,但没有超调现象。
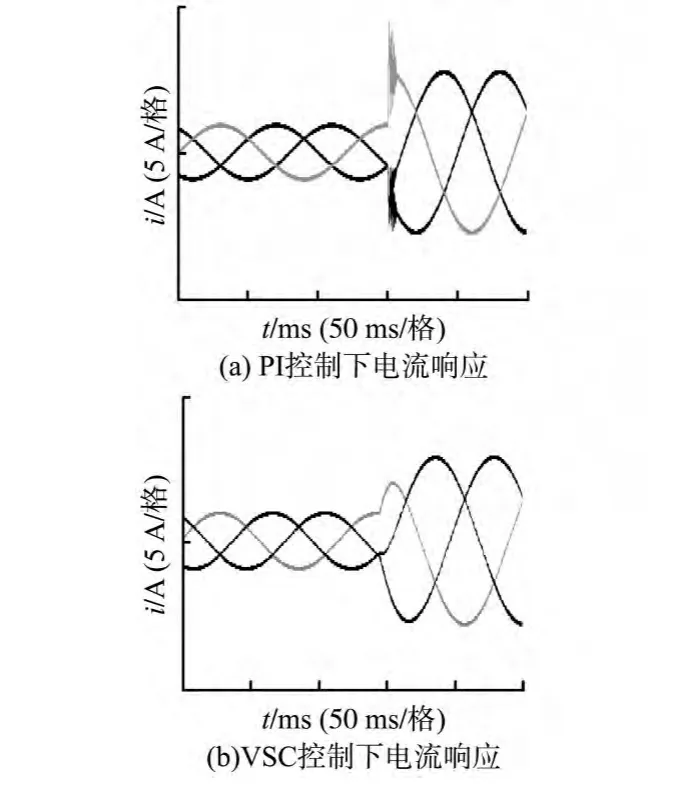
图4 PI控制、滑模控制下的电流响应波形Fig.4 The response of current with PI control and sliding-mode control respectively
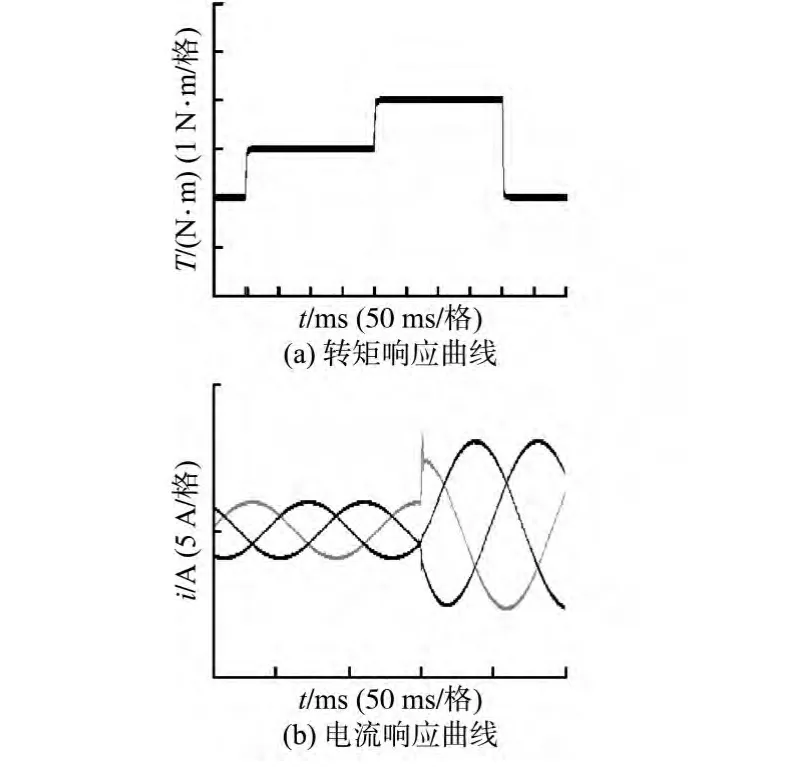
图5 新型控制下的转矩、电流动态响应波形Fig.5 The response of torque and current with proposed controller
由图3可以看出,这两种控制策略具有鲜明的特点,即PI控制策略具有更快的动态响应能力,滑模控制具有更强的抗扰动特性。因此,综合PI和滑模控制策略优点设计的线性-滑模控制器输出响应曲线如图5a,图5b所示。当负载转矩稳定于1 N·m时,控制器表现为滑模控制策略,其转矩脉动小,系统具有较好的稳态特性和较强的抗外界扰动能力;负载突加到2 N·m时,通过调节控制增益使控制器表现为PI特性,输出电流及转矩快速跟踪负载变化,当转矩和磁链误差满足式(7),控制器又表现为滑模控制特性。在暂态过程中,线性-滑模控制器体现了良好快速跟踪能力和抗外界扰动特性,有效抑制转矩和电流超调现象,且电流畸变小。
5.2 实验分析
该实验系统采用了TI公司的DSP TMS320F2812作为控制核心,电机参数同上,智能功率模块采用三菱公司的PM30RSF060,整个功率主电路先经不可控整流,再经全桥逆变输出。为了全面观察系统的响应过程,本文分别给出了电机控制系统的稳态、暂态响应过程的实验及分析。
在稳态下,永磁同步电机运行在恒转矩的工作模式下,负载力矩为1 N·m,且转速设定为150 r/min,如图6电机相电流波形所示,系统进入稳定状态,此时控制器的滑模增益大于输入误差,满足控制器调节增益条件式(9),磁链、转矩控制器的输出主要由滑模函数决定。因此电流脉动小,且系统具有较强的鲁棒性。其次,由于滑模变结构策略自身的特点使该控制器受到不稳定因素影响较小,如定子电阻的变化、磁链观测误差等。
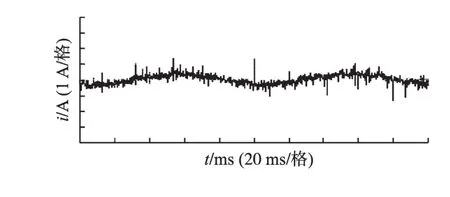
图6 转速为150 r/min下的相电流Fig.6 The phase-current waveform at 150 r/min
在暂态下,即转速变化的过程中加入负载扰动。当电机稳定运行于500 r/min时,负载力矩为0.8 N·m,将转速输入值设定为750 r/min,同时给系统突加负载扰动信号,此时控制器的滑模开关分量小于输入线性误差,控制器切换条件满足式(7),即为线性PI控制模式,而滑模控制作用可忽略,电机相电流迅速跟随扰动变化,瞬态响应时间小于10 ms。当滑模开关分量大于输入线性误差,系统趋于稳定,此时控制器以滑模控制策略为主,系统表现出强抗扰动能力,如图7所示。
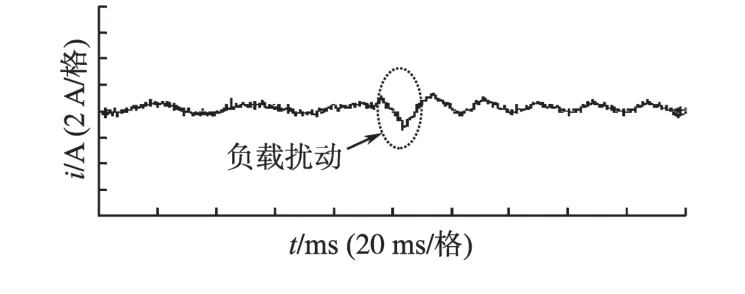
图7 负载扰动下的相电流Fig.7 The phase-current waveform under variational load
由上述可知,在恒负载转矩条件下,该控制器具有很好的稳态性能。当负载扰动时,控制器又能对外界的变化做出快速响应,且过渡过程短。
6 结论
本文针对永磁同步电机调速系统,提出了直接转矩控制与线性-滑模变结构控制相结合的新型控制策略,并保留了传统直接转矩的动态响应能力。该方法不仅克服了线性(PI)控制鲁棒性差和滑模控制响应速度受趋近函数的影响。同时,保留了线性控制良好的动态性能及滑模控制强鲁棒性特点,满足调速系统的暂态及稳态控制要求,且增大了调速范围。仿真分析及实验结果表明该控制策略的正确性,为提高PMSM调速系统的动态品质提供了一种有效方法。
[1] 李国华,王继强.新型异步电动机滑模变结构速度观测器的研究[J].电气传动,2011,41(2):11-15.
[2] Cristian Lascu,Ion Boldea,Frede Blaabjerg.Very-low-speed Variable-structure Control of Sensorless Induction Machine Drives Without Signal Injection[J].IEEE Trans.Ind.Elec-tron,2005,41(2):591-598.
[3] Foo G,Rahman M F.Sensorless Direct Torque and Flux Con-trolled IPM Synchronous Motor Drive at Very Low Speed With-out Signal Injection[J].IEEE Trans.Ind.Electron,2010,57(1):395-403.
[4] Hung Chung-Wen,Su Jen-Ta,Liu Chih-Wen,et al.Fuzzy Gain Scheduling PI Controller for a Sensorless Four Switch Three Phase BLDC Motor[C]//Applied Power Electronics Conference and Exposition, Palm Springs, CA,2010:420-424.
[5] Boldea I,Paicu M C,Andreescu G D,et al.Active Flux DT-FC-SVM Sensorless Control of IPMSM[J].IEEE Trans.Ener-gy Convers,2009,24(2):314-322.
[6] 牛洪海,赵荣祥,尚喆,等.基于CMAC神经网络的永磁同步电机控制方法研究[J].电气传动,2006,36(5):19-21.
[7] 师路欢,丁瑞华,付虹.基于神经网络DTC的电力牵引控制系统的研究[J].电气传动,2011,41(11):12-15.
[8] 王礼鹏,张化光,刘秀翀,等.基于扩张状态观测器的SPMSM调速系统的滑模变结构反步控制[J].控制与决策,2011,26(4):553-557.
[9] 张细政,王耀南.基于滑模观测器的永磁同步电机变结构鲁棒控制[J].控制与决策,2009,24(1):157-160.
[10] Gilbert Hock Beng Foo,Rahman M F.Direct Torque Control of an IPM-synchronous Motor Drive at Very Low Speed Usng a Sliding-mode Stator Flux Observer[J].IEEE Trans.Power Electronics,2010,25(4):933-941.
修改稿日期:2013-11-26
Linear Sliding Mode Variable Structure Direct Torque Control for PMSM System
XIAO Hai-feng1,2,LIU Hai-long1,HE Yu-yao1
(1.School of Marine Science and Technology,Northwestern Polytechnical University,Xi’an710072,Shaanxi,China;2.School of Electric Engineering,Xi’an Aeronautical University,Xi’an710000,Shaanxi,China)
In order to improve the dynamic quality of permanent magnet synchronous machine drives system based on the direct torque control method,a direct torque and linear sliding-mode variable structure control of PMSM drives was presented.The drive employed two new controllers,which to replace conventional hysteresis controllers,to improve response of the drive and to reduce the impulsive motion of the torque and flux by regulation the gain balance between the linear and nonlinear sliding-mode.Simulation and experiments show that the quick response ability of linear control is preserved.The chattering of the flux and torque is restrained obviously.The whole system has good dynamic and static performance.
permanent magnet synchronous motor(PMSM);linear-sliding control;variable structure control;direct torque control
TP273
A
肖海峰(1977-),男,博士研究生,讲师,Email:howard_xiao@mail.nwpu.edu.cn
2013-06-05