永磁同步电机弱磁运行控制策略研究
2014-04-28张朝阳冯晓云许峻峰
张朝阳,冯晓云,许峻峰
(1.西南交通大学电气工程学院,四川成都 610031;2.南车株洲电力机车研究所有限公司,湖南株洲 412001)
永磁同步电机弱磁运行控制策略研究
张朝阳1,冯晓云1,许峻峰2
(1.西南交通大学电气工程学院,四川成都 610031;2.南车株洲电力机车研究所有限公司,湖南株洲 412001)
内埋式永磁同步电机(IPMSM)的弱磁运行受逆变器输出电压、电流以及电机本身可持续工作的电枢电流的制约,同时电机参数对其本身的弱磁能力也有影响。详细分析了这些影响因素,并且根据对这些因素的分析,结合电机数学模型和电压反馈调节策略建立IPMSM的弱磁控制策略,并用实验结果验证了算法的可行性。
永磁同步电机;弱磁控制;电压调节
1 引言
内埋式永磁同步电机(IPMSM)由于其相对较强的弱磁运行能力,在牵引调速系统中获得青睐。但是,其固有的永磁体励磁的特性,使得转子磁链不能直接调节,只能通过调节气隙磁链来达到弱磁的目的。
近20年来,国内外学者针对IPMSM弱磁运行问题,进行了深入的研究。文献[1-2]中,论述了通过调整同步坐标系下的2个电流分量给定值来扩展调速范围的方法,并且提出了用前馈解耦补偿来改进性能,但其弱磁策略中削磁电流的大小由电机数学模型计算,对电机参数和运行条件比较敏感。文献[3]提出了基于电压调节器的弱磁控制策略,该方法不依赖于电机参数,但其动态调速性能需要提高。文献[4]中,作者以实现任何电机转速下最大转矩输出范围和最小电枢电流为目标,提出了一种最优弱磁路径控制策略,该方法对弱磁运行时的输出转矩有较好的可控性,但其弱磁电流指令的计算同样需要精确的电机参数,而且用查表的方法来实现,不够灵活。
本文详细分析了IPMSM的运行约束条件和弱磁控制原理,在此基础上论述了电机参数对其弱磁运行能力的影响,并结合电机数学模型和电压反馈调节,建立IPMSM弱磁控制策略,以获得更好的稳态和动态调节效果,最后通过实验来验证该算法的有效性。
2 IPMSM数学模型和电机运行约束条件
2.1 IPMSM数学模型
忽略铁损后,永磁同步电机在同步旋转d,q坐标系下的稳态数学模型为

式中:vd为d轴电机端电压;vq为q轴电机端电压;id为d轴定子电流;iq为q轴定子电流;Ld为d轴定子自感;Lq为q轴定子自感;R为定子电阻;Ψf为永磁体磁链;ω为电角速度;p为微分算子。
IPMSM电磁转矩的表达式为

式中:Te为电机电磁转矩;np为电机极对数。
2.2 IPMSM运行约束条件
考虑到逆变器容量和电机额定值,电机能输出的最大相电流矢量幅值Ismax取决于可持续工作的电机电枢电流和可以得到的逆变器输出电流,最大相电压矢量幅值vmax取决于逆变器可以输出的最大电压。这样,电枢电流矢量幅值Is和电压矢量幅值vs应该满足如下关系:

由式(3)知,电流约束条件在id-iq平面上形成一个圆:

由式(1)和式(4),忽略定子电阻影响,电压约束条件在id-iq平面上形成一个椭圆:

图1所示为在id-iq平面上的电流约束圆和电压约束椭圆,随着转速ω的升高,椭圆逐渐缩小,但其中心不变为(-Ψf/Ld,0)。

图1 IPMSM运行约束条件示意图Fig.1 Schematie diagram of the constraints for IPMSM control
3 IPMSM弱磁控制原理
牵引应用中,恒转矩区一般采用最大转矩电流比(MTPA)控制。在图1中标出了牵引工况下的MTPA曲线,其与电流约束圆交于A点。分析图1,可以看出,当转速ω≤ω1时,MTPA曲线始终位于电流约束圆与电压约束椭圆之内,这个区域是恒转矩区;当转速ω1<ω≤ω2时,轻载时,MTPA曲线位于电流约束圆与电压约束椭圆之内,可以实现MTPA控制,重载时,MTPA曲线位于电压约束椭圆之外,需要弱磁运行,该区域称为部分弱磁区;当转速ω>ω2时,MTPA曲线完全位于电压约束椭圆之外,无论负载大小,均需要弱磁运行,称之为弱磁区。
3.1 IPMSM弱磁控制策略
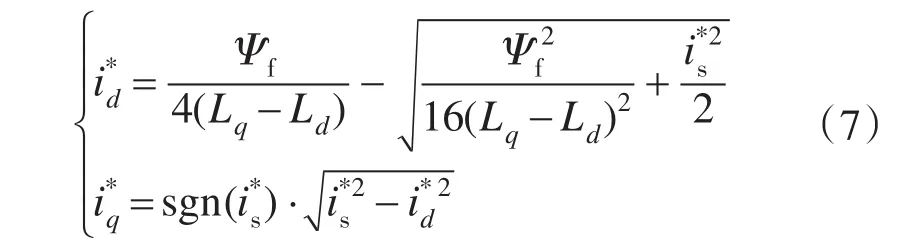
当转速ω>ω2时,电机进入弱磁运行,这时,逆变器输出电压已经用满,应取电压约束椭圆上满足电流约束条件的点来规划电流指令。将i*s代入式(6),得到弱磁运行下,实现矢量控制所需电流分量的规划值:

3.2 部分弱磁区的控制策略
当转速ω1<ω≤ω2时,电机进入部分弱磁区。在部分弱磁区内电机究竟运行在MTPA模式还是弱磁模式并不是固定的,其取决于外部负载条件。该区域需要解决的问题就是如何实现弱磁区和恒转矩区之间的平稳过渡。
电机恒转矩区和弱磁区的区别主要是逆变器输出电压是否饱和,因此,这里采取了如图2的流程来自动辨识电机究竟应该运行在哪个区域。首先根据MTPA得到一组电流指令值,然后结合当前电机转速预测在该电流指令下,逆变器输出电压是否饱和,如果不饱和,就输出该组电流指令,如果饱和,再重新根据弱磁运行下的关系式计算电流指令值并输出。
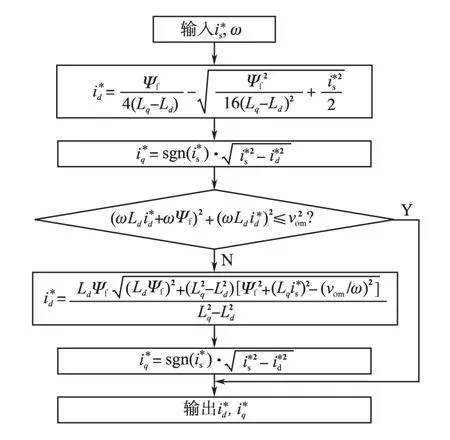
图2 部分弱磁区MTPA和弱磁运行的过渡Fig.2 Transition between MTPA and flux-weakening in the part flux-weakening region
4 电机参数对其弱磁能力的影响
永磁同步电机本体所具有的弱磁能力必然与其自身的参数有关,分析电机参数对其弱磁能力的影响,便于更好地选取电机参数以获得期望的弱磁特性。
为方便分析电机参数的影响,定义弱磁率τ和凸极率ρ,如下:
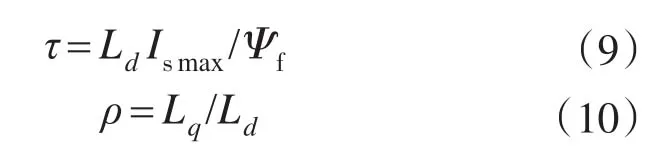
在牵引调速领域,大多数IPMSM满足τ<1和ρ>1的约束,这里只对这种电机进行分析。通常,把电机的最高转速和转折速度(恒转矩区结束点对应的转速,如图1中的ω1)的比值作为衡量电机弱磁能力的标准,定义为弱磁扩速倍数kτ,其值越大,弱磁扩速能力越强。当电机端电压、电流达到最大值,且全部电流都用来进行弱磁时,可以获得电机的理想最高转速ωmax为
式(13)建立了转折速度、凸极率和弱磁率之间的关系,如图3所示。由图3可知凸极率、弱磁率增大,转折速度降低,即转折速度受凸极率和弱磁率影响,而式(12)的最高速度只受弱磁率影响,与凸极率无关,因此可以通过增加电机凸极率来提高电机的弱磁扩速能力。
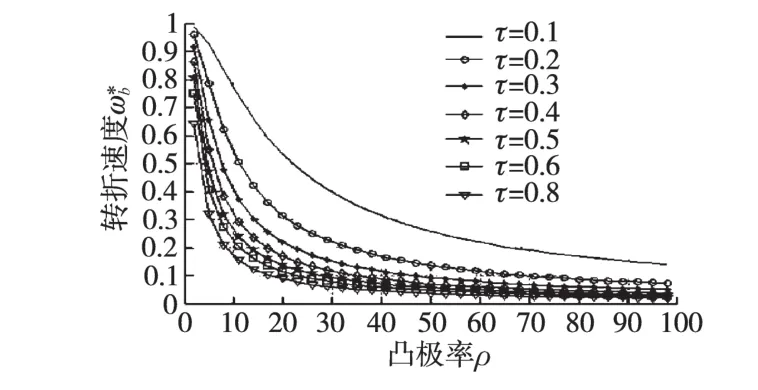
图3 转折速度与弱磁率和凸极率之间的关系Fig.3 Relation of,τand ρ
式(14)所示的弱磁扩速倍数与弱磁率、凸极率的关系如图4所示。由图4可知随弱磁率、凸极率增加,电机的弱磁扩速能力提高。

图4 弱磁扩速倍数与弱磁率和凸极率之间的关系Fig.4 Relation ofkτ,τand ρ
5 IPMSM弱磁控制结构
综合以上分析,一个包含弱磁控制策略在内的IPMSM控制系统框图如图5所示。图5中的电流指令规划模块就是完成图2的功能,由于图2中MTPA和弱磁可以自然选择,其包含了恒转矩区到弱磁区的全部电流规划功能。
在图5的虚线框内,还包含了一个电压反馈调节器。在恒转矩区,通过电流闭环调节补偿后,电机参数变化对电磁转矩的影响很小,可以不考虑。但是,弱磁运行时,由于逆变器输出电压饱和,电流调节器的调节能力受限,电机参数的变化会引起电流指令值的偏差,进而降低系统的动态性能和效率。而电流调节器失效的最直接的表现就是期望的输出电压幅值超过实际能得到的电压幅值,因此,如果能通过调节将期望值限制在比实际值略小的一个较小范围内,就能恢复电流调节器的调节能力,完成弱磁运行。
观察式(8),可以看到通过调节vom可以来调节电流指令值的大小。因此,将输出电压期望值和实际能得到的最大电压值的偏差作PI调节,并用PI调节器的输出对vom进行校正,利用校正后的vom代入式(8),来计算电流指令值。这样电机参数变化引起的偏差就可以被很好的补偿。

图5 IPMSM矢量控制系统框图Fig.5 Block diagram of IPMSM vector control system
6 实验结果及结论
实验所用的100 kW IPMSM电机的参数如下:R=0.006 9 Ω,Ld=0.19 mH,Lq=0.48 mH,Ψf=0.267 2 Wb,np=3,最高转速 n=4 000 r/min,额定/峰值功率100/150 kW,直流母线电压Udc=384 V。
图6给出了在保持转矩指令467 N·m下,将电机从800 r/min加速到2 000 r/min,并保持在2 000 r/min下将转矩指令再减到95 N·m的过程中,电机d,q轴电流分量、电机转速和电机转矩的实验波形。从图6中可以看出电机在从恒转矩区(800 r/min)到部分弱磁区(2 000 r/min)的加速过程转速变化平滑,加速过程中的转矩和电流保持平稳。2 000 r/min下转矩调整过程中,电流、转矩也能很好地跟踪给定,并且电机转速保持平稳。

图6 800 r/min到2 000 r/min加速过程中实验波形Fig.6 Experiment curves in the speed up from 800 r/min to 2 000 r/min
图7所示的是在电机转速保持3 200 r/min(弱磁区)时,转矩指令从17 N·m变到39 N·m,207 N·m,330 N·m的过程中电机电流分量和电磁转矩的跟踪波形,可以看出动态调节性能很好。
IPMSM用在牵引系统中,实现弱磁控制是必须要解决的问题。逆变器输出的电压限制、电流限制以及电机本身的电流限制构成了制约IPMSM弱磁运行的因素,而电机参数则对其本身所具有的弱磁运行能力产生影响。本文在对上述因素分析的基础上,用电机数学模型实现弱磁控制,同时引入了电压反馈调节来校正电机参数偏差引起的性能变差,这样既减小了电机参数的影响,又没有降低系统的动态响应。经过实验验证用该方法来实现弱磁控制是可行的。
[1] Morimoto S,Takeda Y,Hirasa T,et al.Expansion of Operat-ing Limits for Permanent Magnet by Current Vector Control Considering Inverter Capacity[J].IEEE Transaction on Indus-try Application,1990,26(5):866-871.
[2] Morimoto S,Sanada M,Takeda K.Wide-speed Operation of In-terior Permanent Magnet Synchronous Motors with High-perfor-mance Current Regulator[J].IEEE Transaction on Industry Application,1994,30(4):920-926.
[3] Kim M J,Sul S K.Speed Control of Interior Permanent Magnet Synchronous Motor Drive for the Flux Weakening Operation[J].IEEE Transaction on Industry Application,1997,33(1):43-48.
[4] 白玉成,唐小琦,吴功平.内置式永磁同步电机弱磁调速控制[J].电工技术学报,2011,26(9):54-59.
[5] 冯江华.城轨车辆用永磁同步电机驱动系统控制策略研究[D].长沙:中南大学,2008.
Research on the Control Strategy of IPMSM for the Flux Weakening Operation
ZHANG Zhao-yang1,FENG Xiao-yun1,XU Jun-feng2
(1.Electrical Engineering School,Southwest Jiaotong University,Chengdu610031,Sichuan,China;2.CSR Zhuzhou Institute Co.,Ltd.,Zhuzhou412001,Hunan,China)
Flux-weakening operation of IPMSM is constrained by the maximum available output voltage and current of the inverter and the armature current rating in continuous operation.And the parameters of the IPMSM are also factors to constrain its flux-weakening region.On the analysis of these constraints,a flux-weakening control strategy based on the mathematical model of IPMSM and voltage regulation was proposed.And the results of experiment are presented to validate the performance of the proposed scheme.
interior permanent magnet synchronous motor(IPMSM);flux-weakening;voltage regulation
TM351
A
张朝阳(1980-),男,博士研究生,Email:zhzhy_1@163.com
2013-06-18修改稿日期:2013-11-17