基于MC33035的无刷直流电机电控纠偏控制系统设计
2014-04-28吴涛杨靖
吴涛,杨靖
(中国地质大学(武汉)机械与电子信息学院,湖北武汉 430074)
基于MC33035的无刷直流电机电控纠偏控制系统设计
吴涛,杨靖
(中国地质大学(武汉)机械与电子信息学院,湖北武汉 430074)
为了对小直径自动导向钻具的研制开发与应用,介绍了一种采用无刷直流电机电控纠偏的控制系统,通过MC33035控制器驱动无刷直流电机与钻井钻具的导向块相连,电机直接控制导向块的伸缩来纠正钻具的垂直位置,分析了纠偏控制的基本工作原理,实现了电控纠偏的故障诊断与重启,保证钻头垂直钻进,电控纠偏在小直径垂直钻进领域有着重要的应用研究价值。
无刷直流电机;电控纠偏;故障检测
1 引言
随着人类对能源的需求越来越大,人类对能源的勘探和开发也越来越广。钻探工程也不断拓展,钻井的垂直度要求越来越高。因为垂直的钻井轨迹是最短的,可以使套管下井更深,降低钻井过程中的摩擦和转矩,避免粘滑。但是在某种程度上讲,井眼的倾斜是不可避免的。在实际的钻井过程中,由于不同地质条件的因素,导致钻井的井眼轨迹垂直度达不到要求[1]。由于垂钻机械结构的限制,纠偏机构对驱动电机的直径要求小于33 mm,驱动力矩约在2 N·m。一般电机如步进电机、直流电机和交流伺服电机要产生1~2 N·m左右转矩,没有这么小的径向结构(直径在32 mm以下)。或者有的满足直径要求,但达不到转矩和功率要求。无刷直流电机采用钕铁硼磁钢的永磁定子,具有转速高,耐颠簸震动,超长使用寿命,无电刷无磨损,低噪音,无齿槽效应等优点。散热好,过载能力强,低电感,电气时间常数小,可与减速箱,反馈部件和驱动控制器组成各种各样的伺服系统[2]。
2 电控纠偏的特性与基本工作原理
2.1 电控纠偏的特性
自动垂直钻井工具是一种带有井下闭环控制系统、可实现井下主动纠斜、保持井壁垂直、具有极高技术含量的先进钻井工具。目前实际应用中纠偏控制主要采用液压系统,这里采用一种新的纠偏控制系统——电控纠偏系统。电控纠偏系统通过特定的无刷直流电机直接与纠斜工具导向块相连,井下微处理器通过接收的偏移信号自动控制电机的正反转来引导导向块的伸缩。由于钻井井孔大小和电机驱动力大小的制约,自动垂直钻井系统主要用于易斜地层的深井段,纠斜控制系统必将受到井下高温、高压及强振动等恶劣因素的影响,因此在设计纠斜控制系统硬件电路时,必须要保证系统的可靠性。特定的无刷直流电机具有抗高温、高压、防震特性,转矩特性优异,中、低速转矩性能好,启动转矩大,启动电流小;无级调速,调速范围广,过载能力强;可靠性高,稳定性好,适应性强;驱动器采用数字控制方式,保证电机系统特性的稳定性。该系统研究主要应用于小直径导向钻进方向。
2.2 电控纠偏的基本工作原理
自动垂直钻井工具的电控纠偏系统工作原理如图1所示。当井斜时(偏移角大于某一设定角度),通过井下微处理器STM32分析,然后给导向块电控系统发出指令,通过3路无刷直流电机直接控制互成120°的3个导向块伸出推向井壁,使井下的钻具受到一个反方向力的作用,这一反方向作用力使钻头产生一定的降斜力,从而使钻具回到垂直轨道上来(使偏移角小于设定的固定角度)。当钻具回到垂直轨道上后,井下微处理器命令控制3路无刷直流电机驱动导向块缩回,使其反向力消失,让钻头垂直钻进。这样在井下形成一种自动闭环控制,不仅提高了井眼轨道的控制精度[3],还节约了调整钻具所用的时间。
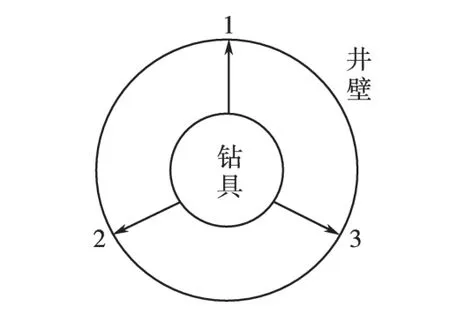
图1 纠偏控制的工作原理Fig.1 The correction control principle of work
3 电机驱动纠偏控制策略
电机控制驱动主要采用STM32光电隔离后控制 MC33035[4]与 MC33039[5]控制器构成的三相闭环控制进行驱动无刷直流电机。能够实现电机的正转、反转、制动。通过3个电机分别连接3个导向块,电机正反转带动导向块的伸缩。各个导向块的控制方式与伸缩状态如表1所示(以导向块1的方向为0°逆时针)。

表1 3电机控制导向块纠斜策略Tab.1 Three motor control strategy of guide block hole straightening
3路电机独立控制3个导向块工作。因此可以2个电机同时工作,通过2路电机控制导向块产生不同的推力,则可以获得2个大小不同的反作用力,2个大小不同的反作用力的矢量和可以指向2个对应的导向块之间夹角为120°范围内的任意位置。电机两两组合就可以产生指向360°范围内任意位置的反作用力。例如:φ=200°时,符合180°<φ<300°,属于F12的范围内,则导向块1,2伸出形成2个方向反作用力F1,F2,2个反作用力形成合力F12进行纠斜。纠偏控制过程如图2所示。
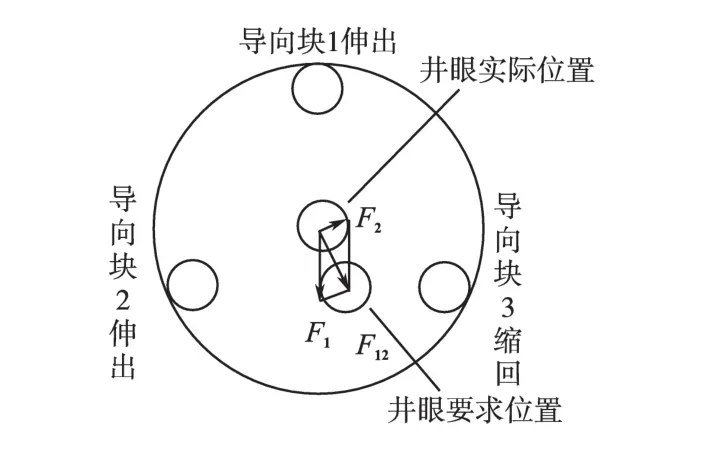
图2 电机纠偏控制示意图Fig.2 The motor correction control schematic
4 电驱控制与硬件结构
4.1 电驱控制动力源
电控纠偏系统主要采用电动来纠正井下钻井工具。由于没有采用液压系统,故也不能利用液压系统的油泵向系统输出压力油来为液压系统提供动力。电控纠偏系统中无刷直流电机驱动主要由稳定的直流电源进行供电。由于电控纠偏系统和钻井工具一起在深井中进行钻进,故获得井上电源不方便,需要井下动力源供电。这里对于电控纠偏系统提出两种方案:一种是提供电池进行供电,电池供电在环境和供电时间上要求很高,故很难达到预期的效果;另一种是井下发电机供电。钻井用井下发电机属于地下钻探装置的辅助设备,特别涉及一种自动垂直钻具的地下电源设施的技术领域。井下发电机配置在地平面之下的外管与内管之间的环状腔体中;发电机的转子通过键被固定在内管的外壁上,定子经外壳被镶嵌在外管的内壁中;内管与上部钻杆相连,下部与钻头相连;发电机的输出端经整流稳压装置输至电子控制装置。后者的输出与测斜仪、测深装置、电磁压力比例阀、电控纠偏系统的输入相连。它能为自动垂直钻具提供足够容量的稳定的直流电源,使钻具成为一种完整的闭环自动垂直钻探的地下系统,它是一种成本低,工作寿命长、安全可靠的地下电源设备。
4.2 电驱控制硬件结构
电驱纠偏控制系统框图如图3所示。由STM32微处理器组成的ARM最小系统,输出IO口光耦隔离后控制MC33035的正传、反转与制动。MC33035加上MC33039,将直流无刷电动机的转子位置信号进行f/V转换,外接6个功率开关器件(3个IRF540和3个IRF9540)组成三相逆变器,驱动三相永磁直流无刷电机,控制器电路构成转速反馈信号,即可构成转速闭环调节系统[6]。控制器电路构成从电机转子位置检测器送来的三相位置检测信号(SA,SB,SC)一方面送入MC33035,经芯片内部译码电路结合正反转控制端、起停控制端、制动控制端、电流检测端等控制逻辑信号状态,经过运算后,产生逆变器三相上、下桥臂开关器件的6路原始控制信号,其中,三相下桥开关信号还要按直流无刷电机调速机理进行脉宽调制处理。处理后的三相下桥PWM控制信号(Ar,Br,Cr)经过驱动电路整形、放大后,施加到逆变器的6个开关管上,使其产生出供电机正常运行所需的三相方波交流电流。另一方面,转子位置检测信号还送入MC33039经f/V转换,得到一个频率与电机转速成正比的脉冲信号FB。FB通过简单的阻容网络滤波后形成转速反馈信号,利用MC33035中的误差放大器即可构成一个简单的P调节器,实现电机转速的闭环控制,以提高电机的机械特性硬度[7]。同时将电机电流信号处理后输入到STM32内部的ADC进行A/D转换,实时检测电机的电流信号,若电流过大会产生故障,MC33035的错误输出信号经过光耦隔离后输出到STM32进行判断(低电平为错误输出)。出现错误信号后能够制动电机,当故障消除后能够重新启动电机。
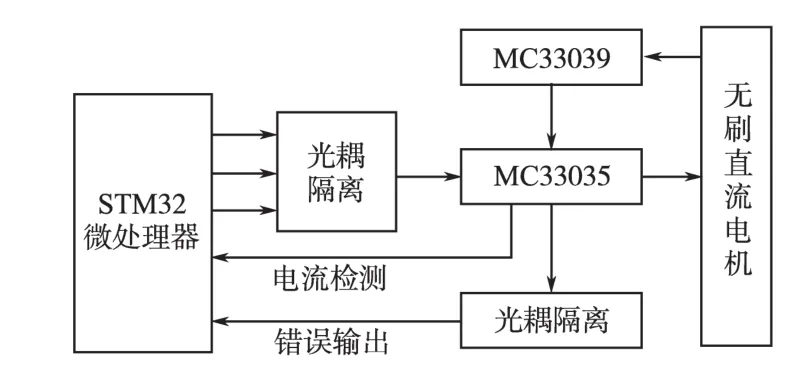
图3 电驱硬件结构图Fig.3 The electric drive hardware structure
5 软件设计
电驱控制系统主要是通过串口接收的测斜仪采集的偏斜角信号,通过地下微处理器STM32判断后自动修正钻井工具的垂直度。同时把井下的倾斜角和方位角等参数发送到地面保存,让地面操作人员可以实时监控井下钻进情况。地面操作人员也可以通过发送指令到STM32控制器,控制和纠正单元的动作,来达到最佳垂直钻进效果。STM32微处理器核心控制板与MC33035的无刷直流电机驱动板分离,通过光耦隔离来降低2个电路之间的干扰。同时在硬件抗干扰措施下,采用软件抗干扰技术进行补充。一般进行数字滤波,信号传送接收自动检验,发生故障自动保存与恢复。由于纠斜过程比较复杂,系统惯性较大,控制对象不易准确建模,故采用数字PI控制算法和PWM控制技术进行控制。从理论上分析,PI调节算法是综合性与稳态无差性的控制方法,具有简单实用、鲁棒性好的优点。由于在纠斜力较小时电机的转速会很低,导致电机输出的转矩波动较大,所以纠斜力较小时其稳定性不好,且动态响应较慢,通过增加一个电流内环调节提高纠斜力的控制。转速闭环调节和电流闭环调节组成双闭环调节系统。速度调节器输出的参考电流信号与实际电流反馈值比较后,作为电流PI调节器的输入,其输出与周期序列信号进行合成,形成PWM逻辑控制信号,根据逻辑换相模块,顺序控制功率开关器件的导通,从而控制逆变器电压幅值,控制绕组的相电流,这样逆变器的输出电流就跟随给定电流的变化,且稳态无静差。当检测到钻具偏移角大于设定的域值时,根据驱动纠偏策略驱动3路电机控制导向块使钻具偏移角回到该域值范围内,然后收回导向块,继续钻进。其工作流程如图4所示。

图4 电驱控制流程图Fig.4 The electric drive control flow
6 实验结果
采用3路无刷直流电机能够在井下复杂的环境中稳定的工作,自动纠正钻具的偏移角度,使钻具时钟保持垂直钻进,同时能够在故障条件下自动保存偏斜数据,自动重启后继续工作。特定无刷直流电机的额定功率为44 W,额定电压为24 V,额定转速为13 r/min,额定电流为2.5 A。当电机在正传中如图5所示为电机在无负载正转状态下和有负载状态下的电流信号与电机转速的关系矢量图。经过实验验证在转速为15 r/min时,到达要求的转矩2 N·m。
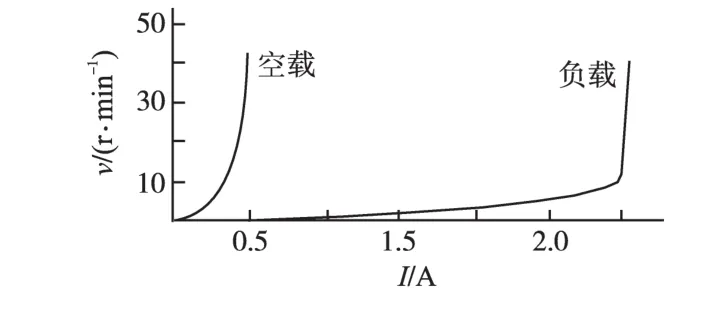
图5 电流信号与电机转速的关系矢量图Fig.5 The relationship vector between current signal and the motor speed
7 结论
自动控向垂直钻井系统中纠偏系统主要采用的是液压纠偏系统,本文提出了一种电控纠偏系统,并进行了实验研究。电控纠偏系统与液压纠偏系统相比:电控纠偏系统具有快速电驱可准确性调整、定位;由于驱动器具有断电保护功能,所以具有记录位置的功能;电机直接正反转控制导向块伸缩,控制精度高;摒弃了油箱、液压泵、液压管路等,结构紧凑,体积小,能耗低、控制灵活等优势。所以适合井下恶劣的工作环境和苛刻的空间限制,在地质勘探小直径导向钻进中具有很好的应用研究价值[8]。
[1] 周琴,姚爱国.自动垂直钻进系统的液压系统设计[J].石油机械,2003,31(12):12-15.
[2] 邹继斌.无位置传感器无刷直流电机驱动电路的研究[J].微电机,1999,32(2):16-18.
[3] 石得权.自动控向垂钻系统性能试验研究[D].武汉:中国地质大学,2005.
[4] 安生美半导体.MC33035[EB/OL].http://www.onsemi.cn/PowerSolutions/product.do?id=MC33035.
[5] 安生美半导体.MC33039[EB/OL].http://www.cosemi.cn/PowerSolutions/product.do?id=MC33039.
[6] 何进进.基于MC33035的无刷直流电机控制器[J].中国西部科技,2009(27):27-29.
[7] 韦敏,季小尹.MC33035在直流无刷电机控制中的应用[J].电工技术杂志,2004(11):83-85.
[8] 赵秀绍,王延军,姚爱国,等.微机自动控向垂钻系统中测斜技术研究[J].煤田地质与勘探,2005,33(3):78-80.
Electronic Control Corrective Control System Design Based on MC33035 by Brushless DC Motor
WU Tao,YANG Jing
(College of Mechanical&Electronic Information,China University of Geosciences Faculty,Wuhan430074,Hubei,China)
In order to the development and application of the small diameter automatic steering down hole discussed a new method of electronic control corrective control system used by brushless DC motor.Trough controller drive the brushless DC motor connect to guide block of the drilling,and the motor control of the guide block scale to correct drill vertical position.A based working principle of the rectify control are analyzed,realized the fault diagnosis of electronically controlled rectifying and restart to guarantee the drill vertical drilling.Electronically controlled rectifying in small diameter vertical drilling field has important application value.
brushless DC motor;electronic controlled rectifying;fault detection
TM921.1
A
吴涛(1979-)男,博士,副教授,Email:wlhxxx@163.com
2013-07-18修改稿日期:2013-11-27