指定次补偿型并联有源滤波器的控制策略研究
2014-04-28杨新华谢兴峰马建立丁海昌万小亮
杨新华,谢兴峰,马建立,丁海昌,万小亮
(1.兰州理工大学电气工程与信息工程学院,甘肃兰州 730050;2.北京京仪椿树整流器有限责任公司,北京 100040;3.南通中集罐式储运设备制造有限公司,江苏南通 226003)
指定次补偿型并联有源滤波器的控制策略研究
杨新华1,谢兴峰1,马建立2,丁海昌2,万小亮3
(1.兰州理工大学电气工程与信息工程学院,甘肃兰州 730050;2.北京京仪椿树整流器有限责任公司,北京 100040;3.南通中集罐式储运设备制造有限公司,江苏南通 226003)
为提高有源电力滤波器补偿的灵活性和补偿精度,提出了一种以传统PI为内环,重复控制为外环的双环复合电流控制器。给出了设计方法和动态性能、稳态性能分析。并提出了将基于多同步旋转坐标的指定次谐波提取与双环复合控制相结合实现无静差指定次谐波补偿的复合控制策略。仿真和实验结果证明了研究内容的有效性和正确性。
有源电力滤波器;重复控制;复合电流控制器;指定次谐波补偿
1 引言
随着电力电子非线性负荷在工业和民用现场应用越来越广泛,电网中电流波形畸变更加严重,谐波和无功问题越来越显著。电力网络中的谐波污染会造成电压畸变、附加损耗、电气设备的共振和干扰、过早老化等问题[1-2]。有源电力滤波器(APF)是一种用于谐波抑制、无功补偿的新型电力电子装置[3]。
APF中补偿电流跟踪控制的性能直接关系到谐波补偿的效果,所以补偿电流跟踪控制部分是APF系统的核心。PI控制具有算法简单和可靠性高的特点,但常规的PI控制对交流参考信号难以达到理想的控制效果[4]。无差拍控制动态响应快,易于计算机执行,但其对系统参数的依赖性较大,鲁棒性较差,瞬态响应超调大[5]。文献[6-7]提出的可选择谐波型有源电力滤波器对抑制特定次谐波具有显著的效果,但是对于各次谐波控制都要单独设计PI控制器,参数设计复杂,而且各次之间会有干扰。
本文对APF选择性谐波控制进行深入研究,针对常规电流PI控制器关于负载电流主要谐波补偿不充分的问题,提出改进控制方案:将负载电流各次谐波经过同步坐标旋转和LPF单独提取出来,把提取的d轴分量和q轴分量分别叠加后再与APF输出谐波电流作差,误差经过PI内环和重复控制外环构成的双环复合控制器来实现谐波电流无静差跟踪。本文的设计方案在一台60 kV·A APF已成功应用。对三相不控整流桥带阻感性负载补偿的仿真及实验,证明了以上方案的正确性和可行性。
2 三相有源滤波器系统结构及工作原理
本文所研究的APF为三相三线制结构。图1给出了并联APF拓扑。APF通过电抗器后并联到电网,补偿对象为一个三相不控整流非线性负载。该类型负载作为电流源负载通常会带来总谐波畸变率大约25%的电流。其典型特点是,它的频谱中仅包含谐波次数k=6n±1,n=1,2,…。k+=6n+1次谐波为正序分量,而k-=6n-1次谐波为负序分量[8]。
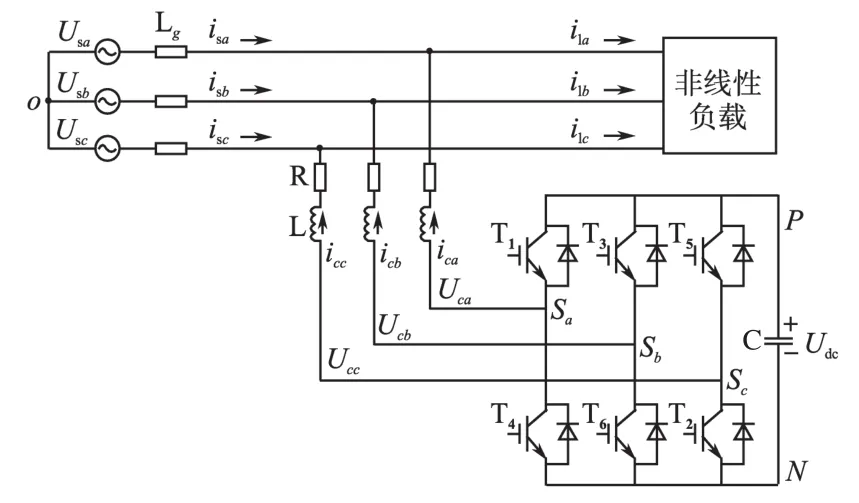
图1 并联有源滤波器系统结构图Fig.1 The scheme of shunt APF
本文研究了非线性系统的谐波提取和控制算法,采用德州仪器公司的TMS320-X28335 DSP处理器实现。利用AD7656模/数转换芯片将电网电压、APF输出电流、负载电流等模拟量转换成数字量,然后通过软件锁相获得电网电压频率和相位信号,再通过谐波检测算法获得补偿电流指令信号,最后经过控制算法使APF产生与指令电流大小相等、方向相反的补偿电流,补偿电流与负载中的谐波电流抵消,实现谐波补偿。
3 并联有源滤波器控制策略
图2是APF系统控制框图。控制系统由谐波电流检测、电流控制环、电压控制环3个环节组成。谐波电流检测环节通过多同步旋转坐标和低通滤波从负载侧电流提取APF补偿电流所需的指定次谐波指令信号;电流控制采用PI结合重复控制的双环复合控制器使得输出的补偿电流可以精确地跟随需要补偿的谐波电流;直流侧电压采用传统的PI控制器即可使得APF直流侧电压较精确地稳定在某个给定值范围内。
3.1 指定次谐波检测方法
本文采用多同步旋转坐标系和低通滤波器结合的方法提取指定次谐波电流。同步旋转坐标变换所需的频率和相位通过检测系统PCC处的三相电压,采用SPLL数字锁相技术实现精确锁相。
三相静止坐标系下的第n次谐波电流变换到两相静止坐标系后得到的矢量是以nω的角速度旋转的,其中ω为正序基波旋转角速度。同步坐标旋转后,正序分量阶数减一,负序分量阶数加一。基于这种思想,可以通过n次同步旋转坐标变换,将n次谐波变为直流量,然后通过低通滤波器将此直流量提取出来。如图2中谐波电流检测环节所示。
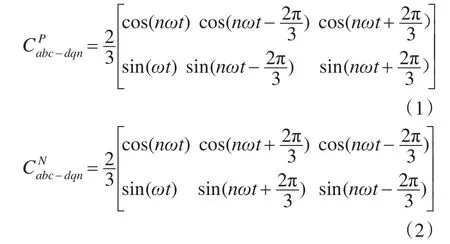
式(1)将n次正序谐波由abc静止坐标系变换到正序谐波坐标系。此时除了n次正序谐波为直流量外,其他次谐波和基波经过相同变换后仍为交流量,经过低通滤波器(low pass filter,LPF),即可提取第n次正序谐波。式(2)将n次负序谐波由abc静止坐标系变换到负序谐波坐标系,提取方法同正序谐波提取。两者变换均采用恒模长。
为了提高系统可靠性和简化控制算法,本文将提取到的正序谐波和负序谐波的d轴分量和q轴分量均变换到基波坐标系下,再分别叠加。正序谐波变换到基波变换公式为

图2 APF控制框图Fig.2 Block diagram of shunt APF

负序谐波变换到基波的变换公式为

为了将直流侧电压稳定在某给定值,将直流侧电压偏差经过PI调节后的输出量也叠加到d轴,叠加后的d轴分量和q轴分量共同作为电流控制器的给定。如图2中谐波电流检测环节所示。
3.2 改进的双环复合控制器
为了提高补偿电流动态性能和稳定精度,本文提出将PI和重复控制结合构成双环复合控制。PI作为内环,重复控制构成外环。其结构如图3所示。PI(瞬时值反馈)内环可以快速响应前馈电流指令,保证系统的动态性能。当系统存在静态误差时,重复控制器可以逐周期减小误差,直至误差为零;而且由于是在内环跟踪误差的基础上进行修正,可以缩短调节过程。从而外环负责稳态精度,内环保证动态性能。确保了系统具有较好的性能。
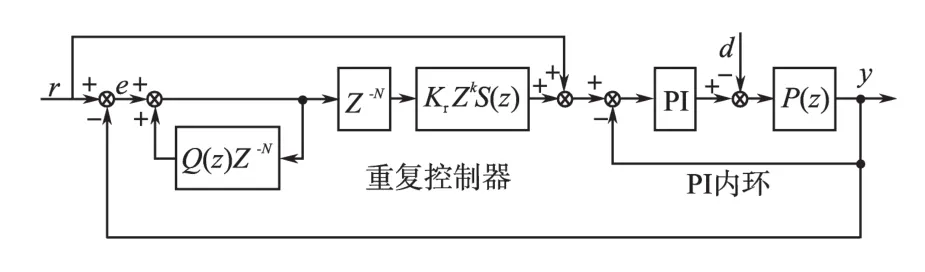
图3 双环复合控制器控制框图Fig.3 Double-loop compound controller diagram
重复控制器的总体设计同时考虑系统的稳定性和静态跟踪性能,通常,Q(z)可以取为一个小于1但接近于1的常数,Q(z)的取值与系统的稳定性密切相关。如果着重补偿电流的波形精度,Q(z)可以取大一些,反之,如果更着重于提高系统稳定的鲁棒性,Q(z)可以取稍小一些。本文中取Q(z)为0.96。补偿环节中幅值补偿在保证足够的稳定裕度下,Kr取l。
S(z)设计采用低频对消、高频衰减的原则,只需要设置一个二阶的低通滤波器,大大地简化了控制器的复杂度。二阶低通滤波器的形式如下:

相位补偿考虑指令电流计算延时、变流器开关延时、补偿器S(z)的相位滞后,增加纯超前补偿器ZK以抵消其相位滞后。根据仿真选取k=4。本系统PI内环控制参数选取Kp=5,Ki=300。
3.3 控制策略分析
本文提出的多同步旋转坐标谐波直接提取方法和复合重复控制结合控制策略,与在各次谐波分别采用独立的PI控制器的控制策略相比[6],由于是将谐波分次提取,叠加后整体控制,从而使用的控制器更少,大大简化了控制器参数的设计,而且各次之间的干扰也比较小,并且该控制策略补偿灵活,当系统具有谐振点时可以选择不补偿谐振频率处的谐波,这样的系统具有更好的稳定性,复合重复控制同时也保证了对各次谐波的动态跟踪和零稳态误差。
4 仿真分析
为验证本文分析的正确性,搭建了三相三线并联型APF仿真平台和实验平台。
图4为使用单PI电流控制器和复合电流控制器的两种仿真结果。图4a为补偿前电网电流,图4b为单PI控制器补偿后电网电流,图4c为复合重复控制补偿后电网电流。比较图4b和图4c明显看出复合控制波形正弦度比单PI控制波形正弦度好。并且通过Matlab/Simulink工具箱的FFT分析可得:采用单PI控制补偿后网侧电流THD从28.2%降到13.2%;采用PI和重复控制构成的双环复合控制补偿后THD从28.2%降到2.88%。

图5为在0.5 s时突增负载的仿真波形,从波形可以看出,复合重复控制快速响应了指令的突变,在突加负载时虽然出现了半个周期指令失真,这不是控制器的响应速度不够,而是在谐波提取环节中用到了一个低通滤波器,算法上造成半周期指令失真。
通过仿真结果证明本文提出的指定次谐波提取和双环复合控制结合的控制策略具有先进性。
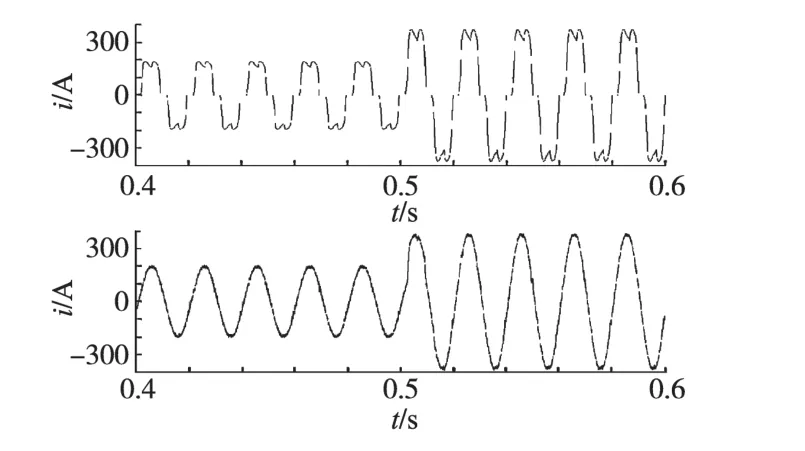
图5 负载突变实验波形Fig.5 Experimental waveforms of load sudden rise
5 实验验证
APF实验系统的参数选取如下:交流电源相电压有效值220 V;电网频率50 Hz;直流侧电容8 100 μF;变流器侧电感0.3 mH,APF额定容量60 kV·A。控制系统由TMS320-X28335 DSP构成,重复控制器以及PI控制器参数设计结果如前所述。补偿负载额定功率为120 kW的中频电源。
图6为补偿前网侧电流波形和频谱分析。谐波频谱分析知补偿前网侧电流畸变率为25.46%。并且可以看出主要含有5,7,11,13,17次谐波电流。与仿真结果一致。
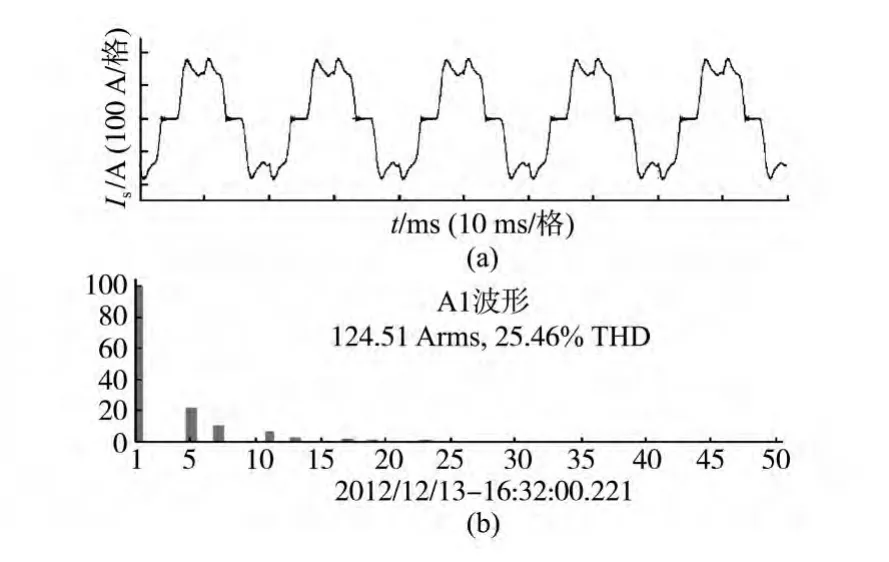
图6 负载电流波形和FFT分析Fig.6 Waveforms of load current and FFT analysis
图7为电流补偿器使用单PI控制,指定次补偿5,7,11,13,17次谐波时的网侧电流Is和APF输出电流If的波形图。从波形看出单PI补偿效果并不理想。经CA8335频谱分析补偿后网侧电流THD只能降到13%。图8为电流补偿器使用双环复合控制器,只指定补偿5次谐波时的网侧电流Is和APF输出电流If的波形图。从图8中看到APF输出电流为频率250 Hz的正弦波。网侧电流波形与图6a对比,能明显看出仅补偿5次谐波后,电流波形畸变已得到较大的改善。
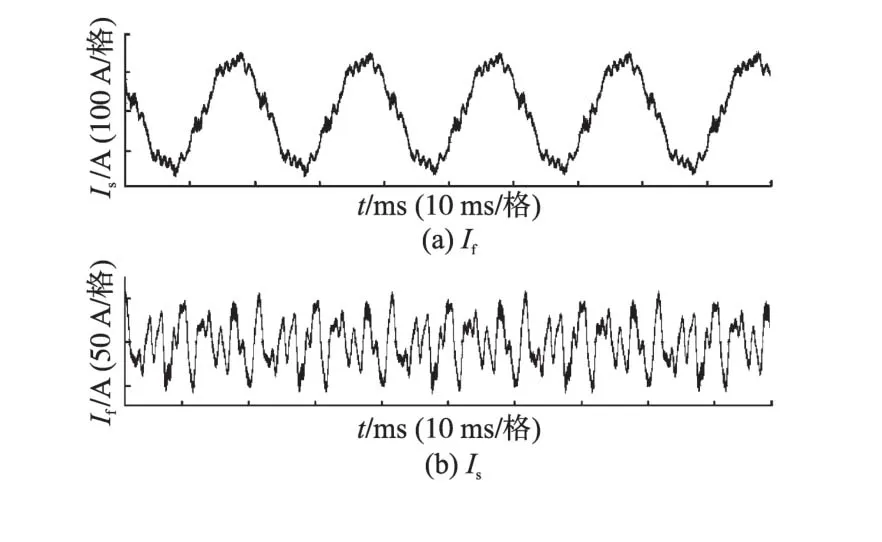
图7 单PI控制网侧电流和APF电流波形Fig.7 Grid current and APF current with single PI controller
图9为电流补偿器使用双环复合控制器,指定次补偿 5,7,11,13,17次谐波时的网侧电流Is,APF输出电流If的波形图。图10为补偿后网侧电流频谱分析。从波形可以看出采用双环复合控制补偿后网侧电流波形基本接近正弦波。APF输出电流也比较稳定。与采用单PI控制的图7中电流波形对比,明显看出补偿效果得到较大改善。通过频谱分析知补偿后电流畸变率THD降到了2.84%。实验与仿真结果一致,可得出采用复合控制可以很大程度提高补偿性能。
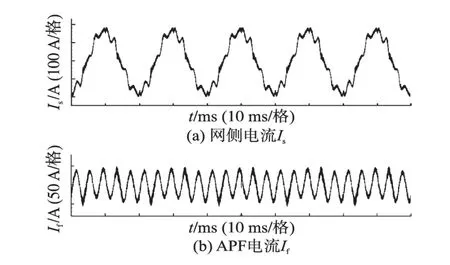
图8 单补偿5次谐波网侧电流和APF电流波形Fig.8 Grid current and APF current with single compensation 5 harmonic waves
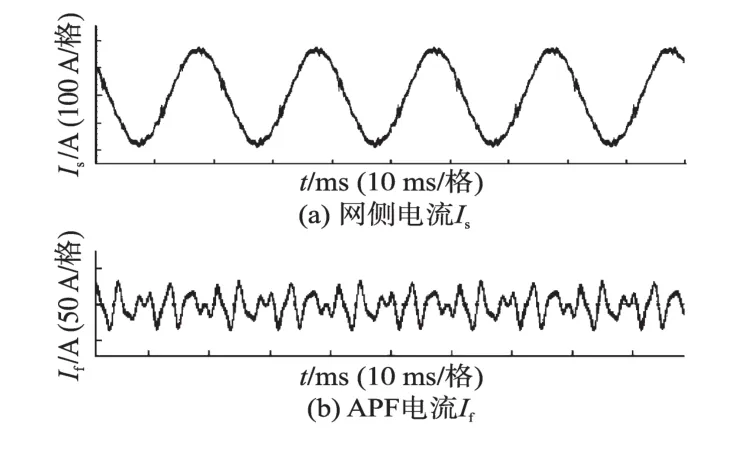
图9 复合控制网侧电流和APF电流波形Fig.9 Grid current and APF current with proposed compound controller

图10 复合控制网侧电流FFT分析Fig.10 FFT analysis of grid current with proposed compound controller
6 结论
本文提出的APF方案,通过指定次谐波提取并采用复合电流控制器控制。理论分析和实验结果证明:
1)能够正确提取指定次谐波电流,并且结合双环复合控制能够实现高精度指定次跟踪补偿;
2)以重复控制为外环,PI为内环构成的双环复合控制算法比单PI控制具有更好的补偿效果,而且该复合控制器具有很高的补偿精度。
该控制策略对于那些谐波频谱广而且不确定的场合不太适用,须进一步改进。
[1] Asiminoaei L,Rodriguez P,Blaabjerg F.Application of Discon-tinuous PWM Modulation in Active Power Filters[J].IEEE Trans.on Power Electronics,2008,23(4):1692-1706.
[2] Verma V,Singh B.Design and Implementation of a Current-controlled Parallel Hybrid Power Filter[J]. IEEE Trans.on Industry Applications,2009,45(5):1910-1917.
[3] 王兆安,杨君,刘进军.谐波抑制和无功功率补偿[M].北京:机械工业出版社,1998.
[4] 唐欣,罗安,涂春鸣.基于递推积分PI的混合型有源电力滤波器电流控制[J].中国电机工程学报,2003,23(10):38-41.
[5] Shin-ichi Hamasaki,Atsuo Kawamura.Improvement of Cur-rent Egulation of Line-current-detection-type Active Filter Based on Deadbeat Control[J].IEEE Trans.on Industry Ap-plications,2003,39(2):536-541.
[6] 张树全,戴珂,谢斌,等.多同步旋转坐标系下指定次谐波电流控制[J].中国电机工程学报,2010,30(3):55-62.
[7] 李刚.有源电力滤波器系统指定次谐波补偿的研究[J].建筑电气,2012,31(3):41-46.
[8] Lascu C,Asiminoaei L,Boldea I,et al.High Performance Current Controller for Selective Harmonic Compensation in Active Power Filters[J].IEEE Trans.on Power Electronics,2007,22(5):1826-1835.
修改稿日期:2014-04-16
Research on Shunt Active Power Filters with Selective Harmonic Compensation of Control Strategy
YANG Xin-hua1,XIE Xing-feng1,MA Jian-li2,DING Hai-chang2,WAN Xiao-liang3
(1.College Electrical and Information Engineering,Lanzhou University of Technology,Lanzhou730050,Gansu,China;2.Beijing Chunshu Rectifier Co.,Ltd.,Beijing100040,China;3.Nantong CIMC Tank Equipment Co.,Ltd.,Nantong226003,Jiangsu,China)
To improve the flexibility and the precision of compensation of three-phase shunt active power filter,a double-loop compound current controller was proposed,which repetitive controller as the outer loop,the PI controller as the inner loop.Design method in detail,dynamic response and steady-state characteristic in analysis.And put forward the compound control strategy,which combine selective harmonic detection based on multiple synchronous rotating coordinates with double-loop compound controller,achieved the compensation of zero steady-state error and selective harmonic current.Both simulation and experimental results verify the effectiveness and correctness of the content.
active power filter(APF);repetitive controller;compound current controller;selective harmonic current compensation
TM712
A
杨新华(1966-),男,本科,教授,Email:yangxh5852@163.com
2013-05-22