一种多关节轻量化离散驱动机械臂的设计与研究
2014-04-26朱晓龙顿向明山磊顿向勇
朱晓龙,顿向明,山磊,顿向勇
(1.上海交通大学机器人研究所,上海 200240;2.常州远量机器人技术有限公司,江苏常州 213100)
0 前言
随着空间技术的飞速发展,特别是空间站、航天飞机、空间机器人等的诞生及成功应用,空间机械臂作为在轨支持、服务的一项关键性技术已经进入太空,并越来越受到人们的关注[1]。
通常,空间机械臂的各个关节都由一个独立的电机进行驱动,如日本的工程技术卫星ETS-VII[2-3]的机器人臂有6个自由度,每一个关节由无刷直流电机和谐波减速器驱动;德国宇航中心DLR研制的六自由度空间机器人系统ROTEX[4]以及两关节机械臂ROKVISS[5]。但是,这种关节驱动方式需要的电机和减速器的数量较多,从而导致机械臂的体积和自重很大一部分来自于驱动电机及减速器,增大了发射费用和发射难度,并且降低了机械臂的驱动能力。因此,有必要采用新的结构设计理念研制出更加轻量化、更加经济高效、更加可靠的空间机械臂。
单马达驱动技术是一种新型的机械臂设计技术。与传统的机械臂设计方式不同,单马达驱动式机械臂多个关节由同一电机提供动力。这种设计方式使得电机和减速器的数量大大减少,进而使得机械臂的总质量和体积减小,结构更加紧凑。目前,已经有一些研究者对这面进行了相关研究,如加拿大的KARBASI[6]博士设计了一台单电机两自由度柔性机器人,并采用高速离合器进行关节调速;新加坡南洋理工大学研制的20自由度蛇形机器人[7]以及金刚机器人[8-9],采用一个马达驱动多个串联关节;华中科技大学的李世其教授和刘洋博士等人采用模块化设计理念,设计出了具有扭转、弯曲两个关节的运动模块,并利用该运动模块研制出了一台利用直流电机进行驱动的6自由度轻型机械臂XN-600-1[10];上海交通大学的马培荪教授[11]也研制出了一个由单电机离散驱动的7自由度蛇形柔体机械臂,电机的动力通过一种特殊的万向节传递到各个关节,并利用离合器和蜗轮蜗杆传动驱动关节动作。
作者基于单马达驱动技术,研制了一台5自由度的多关节轻量化离散驱动机械臂。该机械臂利用锥齿轮传动、直齿轮传动以及带传动将驱动电机的动力传递到各个关节及手爪,并利用离合器、蜗轮蜗杆传动、直齿轮传动驱动各个关节动作。该机械臂未采用模块化设计理念[6],具有关节设计灵活、齿轮总数量少、质量轻、体积小等优点。文中首先对该机械臂的机械机构、工作原理、关节耦合特性进行了介绍,并利用ANSYS对其进行了模态分析,找出了固有频率。然后,通过对机械臂进行运动学求解以及仿真验证了机构的可行性。
1 机械臂总体介绍
所设计的机械臂具有5个自由度,关节类型分别为:扭转关节—弯曲关节—弯曲关节—扭转关节—弯曲关节。对于单电机驱动的4个关节其动力流传输主要分为两个部分:一条主动力链,4条支路动力链。各个关节通过离合器从主动力链获取动力,并通过减速后作为支路动力驱动各个关节,机械臂三维模型如图1所示。
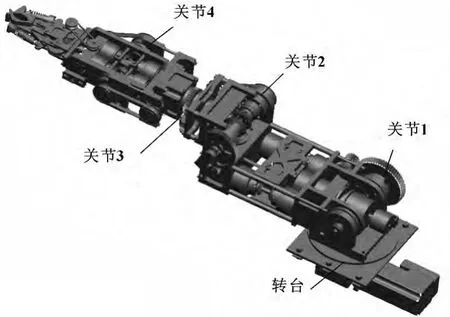
图1 机械臂3D模型
该机械臂运动学模型与传统机械臂类似,5个关节的角度决定了末端手爪的位姿。通过合理地运动规划可以实现复杂的末端轨迹。
2 机械臂结构及运动特性
2.1 设计思路
传统机械臂各个关节由各自的驱动电机独立提供动力,关节之间相互独立。为了减小机械臂的质量和体积,可以采用单电机驱动的方式。文中采用动力分流的设计理念实现单电机驱动,将机械臂的驱动力分为主动力链和关节支路动力链,主动力链将驱动电机的动力传递到各个关节位置,各个动力支路则利用离合器从主动力链获取动力以驱动对应关节。从主动力链角度来说,该设计方式能够方便地利用简单的齿轮传动实现,具有结构简单、传动精度高、组成零件少的优点;从支路动力链角度来说,各个关节通过离合器从主动力链获取动力,能够最大程度地减小关节动力耦合,使这种单电机驱动机械臂能够同传统机械臂一样实现灵活的末端轨迹。动力流示意图如图2所示。
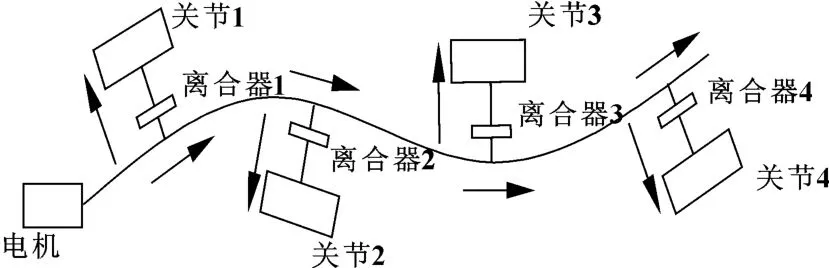
图2 驱动力流示意图
2.2 机械结构
对于动力主传动链,其动力流由关节驱动电机流出,经过锥齿轮传动以及带传动流向各个关节。而对于动力支路传动链,由离合器从动力主传动链获取动力,并经过蜗轮蜗杆以及齿轮或带轮的减速后驱动各个关节。机械臂关节1、关节2、关节3的简化结构以及动力流传动链如图3所示,其中实线箭头为主动力流路径,虚线箭头为支路动力流路径。
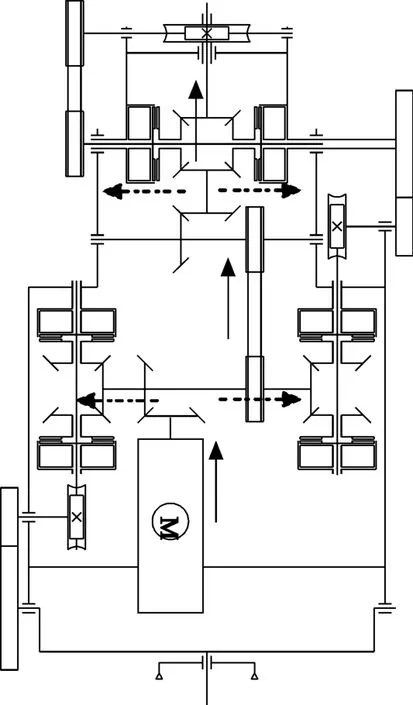
图3 机械臂动力传动链示意图
2.3 关节驱动原理
各个关节通过由离合器、蜗轮蜗杆、带轮和齿轮组成的动力支路从机械臂的主动力传动链上获取动力,以实现自身的运动。其中,关节一驱动原理图如图4所示,以其为例进行分析。
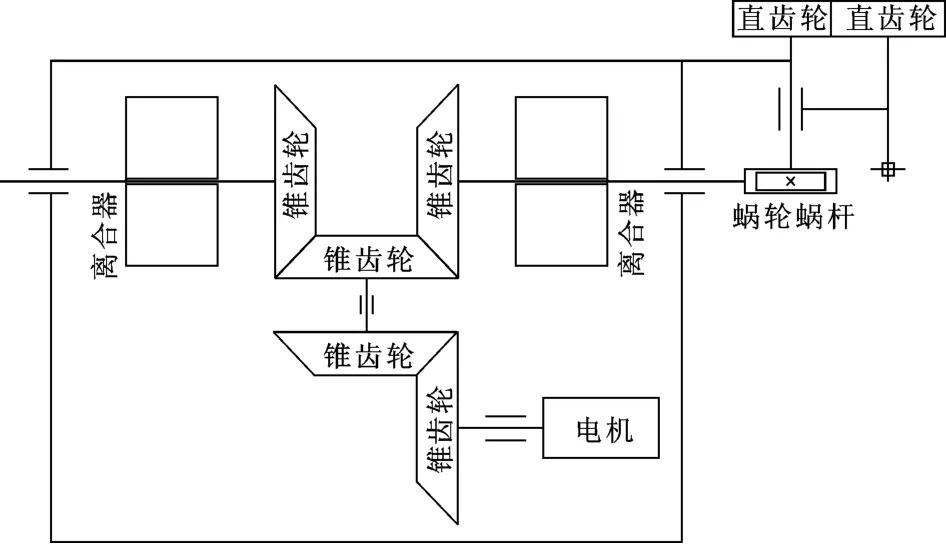
图4 关节驱动原理图
从图中可以看出,电机的输出经过两组锥齿轮传动传递到左右两个离合器的输入轴,两个离合器的接合可以实现关节的正反向运动。同时,每个关节的驱动支路都有蜗轮蜗杆传动机构,既提供了减速和放大力矩的功能,同时也能够实现关节掉电时候的自锁。
2.4 关节运动耦合
对于这类采用离散驱动方式的单电机机械臂,由于一般机械臂关节在传动链轮系中起行星架的作用,因此主传动链的速度会随关节运动状态的变化而发生改变,从而造成关节相互之间的运动耦合。例如,所设计机械臂的由同一电机提供动力的4个关节中,有3处存在耦合现象,对应轮系如图5所示。
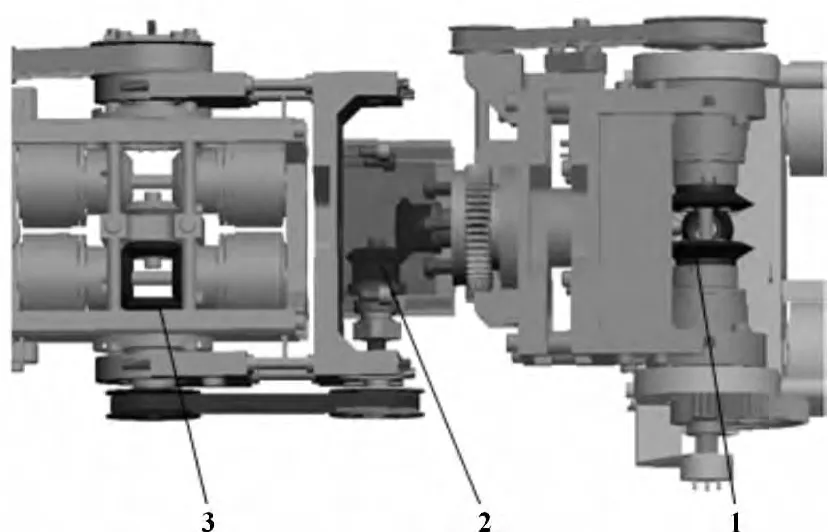
图5 耦合关节分布
为了分析不同关节速度下主传动链速度的差别,以图5中2耦合关节为例将关节轮系进行简化,如图6所示。
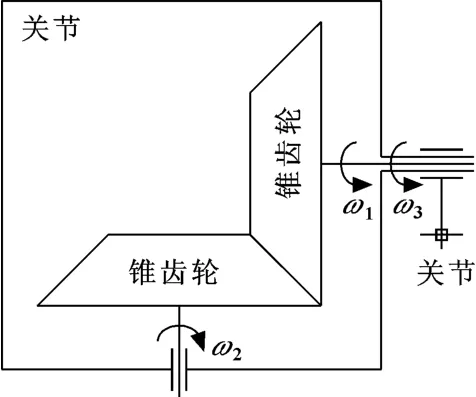
图6 耦合特性示意图
其中:ω1为右侧齿轮相对于其所在关节的转速;ω2为下侧齿轮相对于其所在关节的转速;ω3为下侧齿轮所在关节相对于右侧齿轮所在关节的关节转速,转速方向如图6所示,且两个锥齿轮齿数相同。当ω3为零时,即左侧关节不运动时,两个锥齿轮组成定轴轮系,传动比为1∶1。当ω3不为零时,即左侧关节转动时,该轮系变为周转轮系,利用周转轮系传动比的计算公式计算得出其传动比为:

从而可以得出ω2=ω1-ω3,保持轮系输入ω1不变,则在不同关节转速ω3下该轮系输出速度之差为:

其中,ω'3为变化后的关节速度。当ω3转向相反时,Δω2=Δω3,即当存在耦合特性的关节其关节速度发生改变时,轮系输出速度之差为Δω2=±Δω3。同理,对耦合关节1处进行分析得出Δω2=±2Δω3。
从上述分析可以看出,这类存在耦合特性的关节在不同关节转速下轮系输出速度之差为Δω=±kΔω0,其中k为轮系传动比,ω0为作为行星架的关节的转速大小。由于这种耦合特性的存在,导致当这类关节运动状态变化时该关节后面的主传动链速度发生改变,从而影响后面的关节运动。因此在多关节联动时,需要通过实时对离合器占空比等控制量进行相应的调整,以保证其关节速度维持在期望值。
3 机械臂的模态分析
对于机械臂,其工作状态一般为悬臂梁结构,如果在其工作过程中出现共振现象则会很大程度地影响末端手爪的运动精度,导致机械臂无法完成目标任务。因此,为了避免共振的发生,对机械臂进行了模态分析以找到其固有频率。
为了分析机械臂的模态,采用ANSYS作为分析工具。为了使仿真能够进行,对完整的机械臂模型进行了简化。同时,由于机械臂处于不同的工作状态其模态会有所不同,因此对3种典型工作状态进行模态分析,以此得到其共振频率大概范围。3种工作状态下的有限元模型如图7(a),7(b),7(c)所示,分析结果如表1所示,每种状态列出其前5阶固有频率。
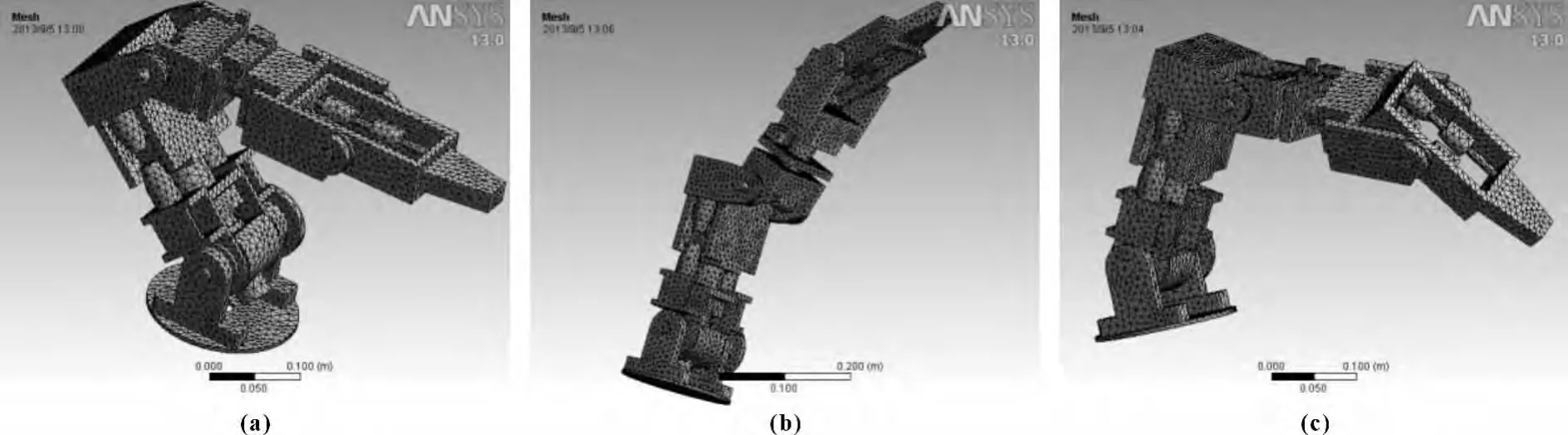
图7 机械臂有限元模型
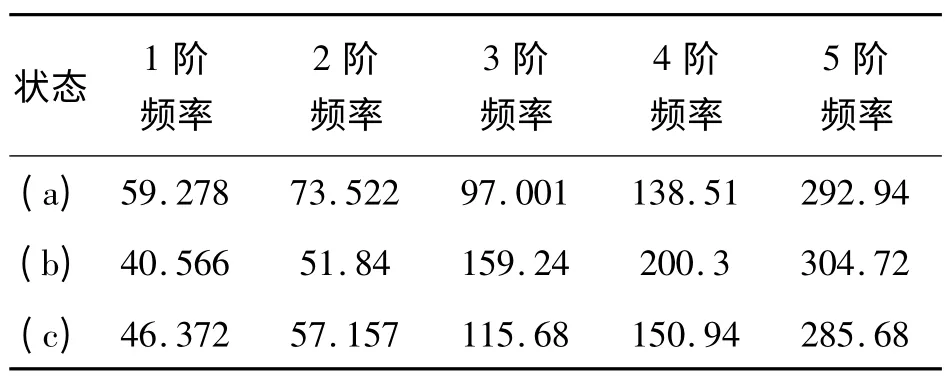
表1 模态分析结果Hz
从表1的分析结果可以看出机械臂最低固有频率在40 Hz左右,因此机械臂的激励应小于该值。对于该机械臂来说,主要震动来源为电机和离合器。该机械臂底座驱动电机正常输出转速为800 r/min,手臂关节驱动电机输出转速为1 500 r/min,转化为频率分别为13.3 Hz,25 Hz;同时离合器PWM调速频率为20 Hz左右。因此该机械臂的激励频率远离最低共振频率,从而保证机械臂在正常工作状态下不会发生共振现象。
4 机械臂的运动学分析
4.1 坐标系统及运动学求解
为了对机械臂进行运动学求解,首先建立其坐标系统。为方便机械臂几何法逆解的计算,坐标系建立情况未完全按照D-H法进行,具体坐标系建立情况如图8所示。
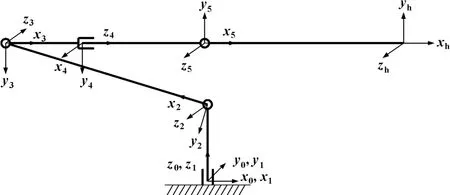
图8 机械臂坐标系统
图8中,从基础坐标系附近开始,5个连杆的长度分别为89 mm、245.9 mm、85 mm、147 mm、231.7 mm。根据相邻坐标系之间的空间相对位置关系,可得到相邻关节之间的位姿变化矩阵:
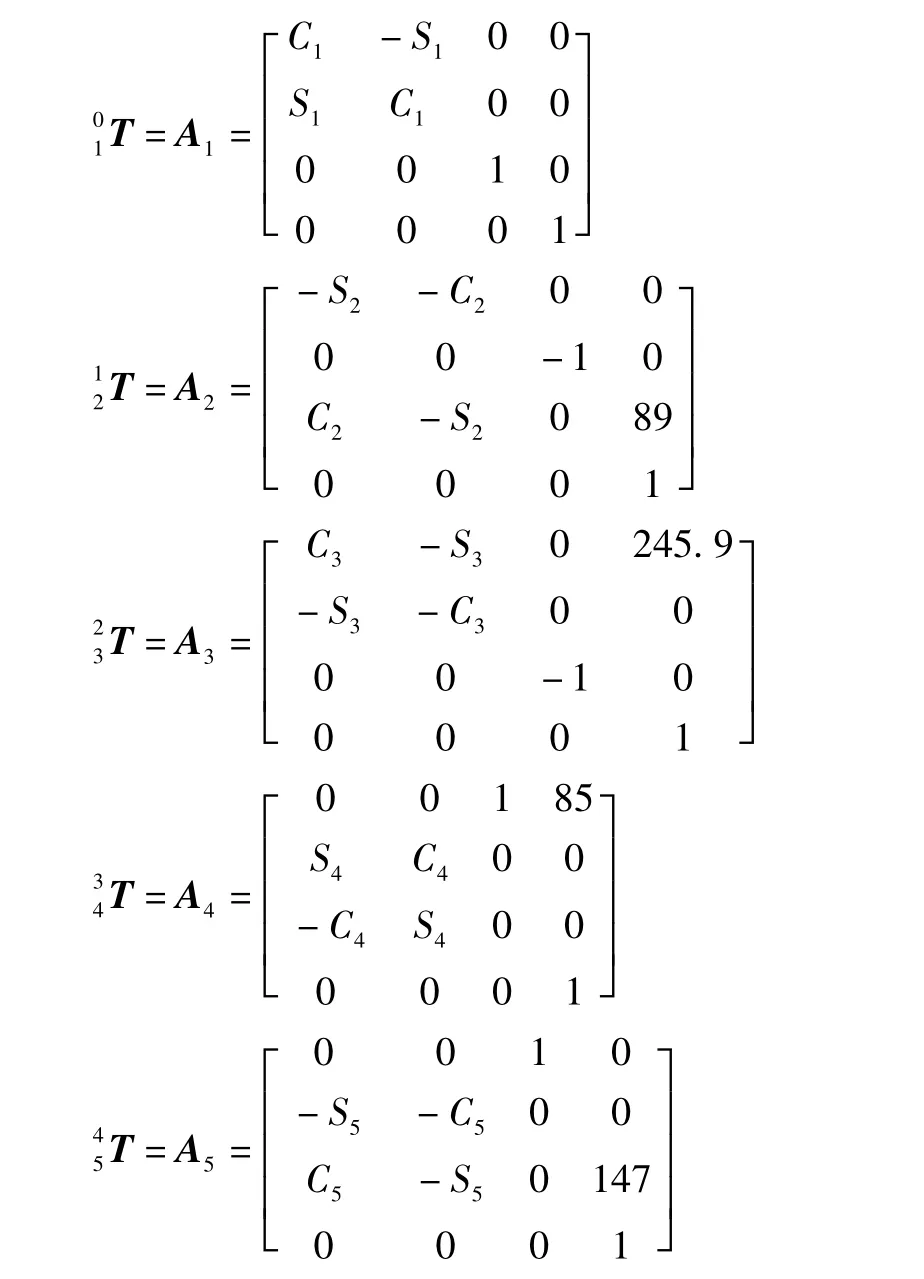
其中Ci(i=1,2,…,5)代表cosθi,Si(i=1,2,…,5)代表sinθi。将各个关节变换矩阵顺序相乘,即可得到末端关节的位姿矩阵:
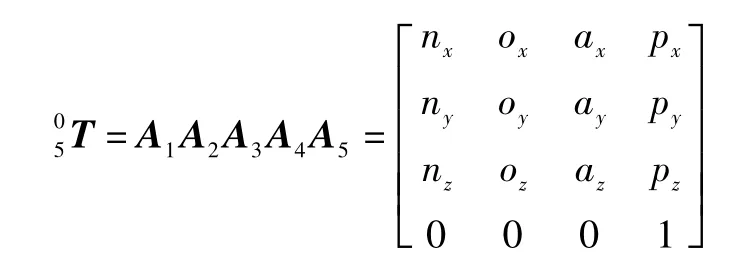
其中:n,o,a 3个向量描述了机械臂末端连杆的姿态,p向量描述了末端连杆的位置。
4.2 运动仿真
为了验证机械臂机构的可行性,采用MATLAB对其进行追踪直线轨迹的运动仿真,空间直线为从点(354,173,403)运动到点(343,286,453)。将运动过程分为20段,采用MATLAB计算各节点处的关节空间解。其中,机械臂对位置、姿态的追踪效果如图9,图10所示,关节角度位移曲线如图11所示。
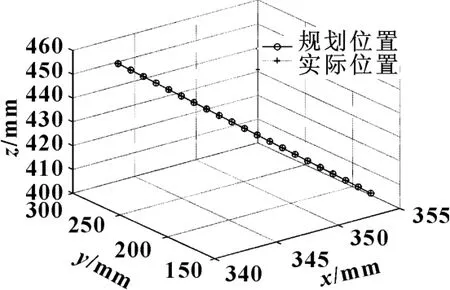
图9 位置追踪效果
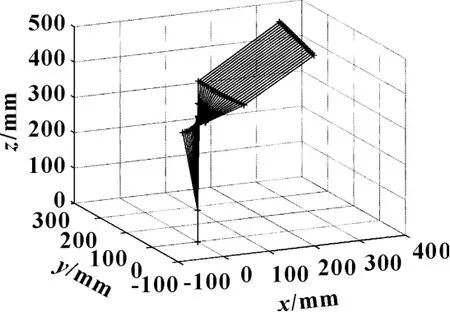
图10 姿态追踪效果
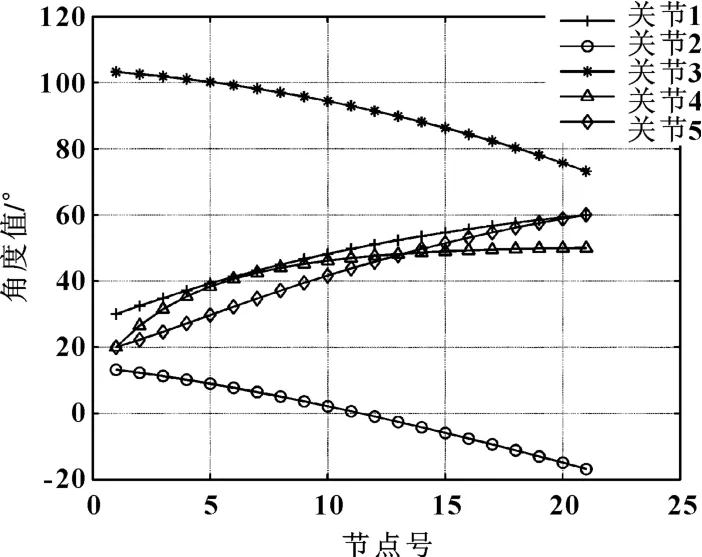
图11 关节位移曲线
从图中可以看出,该机械臂能够实现直线轨迹的追踪,且各关节运动较为柔顺,仿真证明该机械臂的机械结构可行。
5 样机及总结
机械臂样机的驱动电机采用BMP6224-Y系列的空心杯无刷直流电机,离合器采用BO-3.5神钢离合器,机械臂完全伸展总长750 mm,质量为22 kg。底座运动范围0°~360°,从底座向外4个活动关节运动范围依次为0°~180°,0°~180°,-170°~170°,-90°~90°,样机模型如图12所示。
该机械臂实现了单电机驱动,通过仿真分析,表明该机械臂可以实现复杂运动轨迹。与传统机械臂相比,该机械臂所需电机和离合器数目较少,因此更轻,更紧凑,在航天应用这种对发射负载质量限制高的情况下,理论上比传统机械臂更适宜作为空间机械臂完成空间加注、在轨维修等任务。对当前机械臂来说,离合器调速性能还有待高,如何实现这种类型机械臂的高精度、快响应离合器调速是随后需要研究的问题。
[1]于登云,孙京,马兴瑞.空间机械臂技术及发展建议[J].航天器工程,2007,16(4):1-9.
[2]ODA M,KIBE K,YAMAGATA F,ETS-VII.Space Robot in-orbit Experiment satellite[C]//IEEE International Conference on Robotics and Automation.Piscataway,NJ,USA:IEEE,1996:739-744.
[3]ODA M.Space Robot Experiments on NASDA's ETS-VII Satellite-Preliminary Overview of the Experiment Results[C]//IEEE International Conference on Robotics and Automation.Piscataway,NJ,USA:IEEE,1999:1390-1395.
[4]HIRZINGER G,BRUNNER B.ROTEX-the First Remotely Controlled Robot in Space[C]//IEEE International Conference on Robotics and Automation.Piscataway,NJ,USA:IEEE,1994:2604-2611.
[5]HIRZINGER G,LANDZETTEL K,REINTSEMA D,et al.Rokviss-robotics Component Verification on Iss[C]//The 8thInternational Symposium on Artificial Intelligence,Robotics and Automation in Space-Isairas.Munich,Germany,2005:3879-3885.
[6]KARBASI H,HUISSOON J P,KHAJEPOUR A.Uni-drive Modular Robots:Theory,Design,and Experiments[J].Mechanism and Machine Theory,2004,39(2):183-200.
[7]XIE M.Fundamental of Robotics:Linking Perception to Action[M].Singapore:World Scientific,2003.
[8]ZHU H H,XIE M,LIM M K.Modular Robot Manipulator Apparatus[P].PCT/SG00/0002,January 2000.
[9]LI M J.Toward Single Motor Driven Biped Robot[D].Singapore:School of Mechanical and Aerospace Engineering Nanyang Technology University,2005.
[10]李世其,刘洋,朱文革,等.多关节轻型机械臂的设计研究[J].航天器工程,2009,18(3):48-52.
[11]马培荪,朱海鸿,王建滨,等.一种蛇形柔性臂的系统及结构[J].上海交通大学学报,2001,35(1):72-75.
