潜艇应用自航式声诱饵防御声自导鱼雷仿真研究
2014-04-24王顺杰
李 斌,王顺杰
(海军潜艇学院,山东 青岛 266071)
潜艇尤其是攻击型潜艇是非常强调攻击的进攻性兵力。然而,在探潜和反潜技术迅速发展的现代海战条件下,潜艇的防御显得越来越重要[1]。由于潜艇本身构造比较特殊,结合复杂水下作战环境的影响,因此其被鱼雷击中后自保的机会十分渺茫。对于潜艇而言,其威胁主要来自于自导、线导等重型鱼雷以及空投、火箭助飞鱼雷。现代制导鱼雷具有很高的命中概率,据统计,在正常情况下,鱼雷命中概率可达80%以上。但是当目标潜艇使用水声对抗等手段后,其命中概率就会降低。水声对抗器材可分为抑制型对抗器材和诱骗型对抗器材,自航式声诱饵是典型的诱骗型对抗器材[2]。自航式声诱饵不仅能模拟潜艇的辐射噪声特性和声反射特性,还能模拟潜艇的运动特性,对鱼雷具有很大的欺骗性。使用自航式声诱饵防御声自导鱼雷成为潜艇水下防御的主要手段之一[3]。
1 问题描述及模型建立
设初始时刻本艇发现来袭的声自导鱼雷的位置为坐标系原点,鱼雷报警舷角为XT,潜艇与鱼雷距离为D,此时潜艇立即发射诱饵进行水声对抗。设鱼雷航速为VT,航向为HT,潜艇规避机动航速为VQ,航向为HQ,设某时刻诱饵速度为VD,航向为HD。
1.1 来袭声自导鱼雷运动位置坐标仿真模型
鱼雷入水后,其设定的搜索深度按目标深度选定。对仿真程序做适当简化,可将鱼雷、潜艇、诱饵设为同一深度,在二维视图上研究潜艇对声自导鱼雷的防御问题。
目前鱼雷的声自导装置采用的自导控制机制有多种。采用不同的自导控制机制,鱼雷声自导装置发现并捕获目标后控制鱼雷追踪目标的自导追踪航行段弹道形式也不同。常见的尾追式弹道,可以使鱼雷航向始终对准目标,及时辨明目标运动方向,保证对目标的稳定跟踪,如图1所示。
图1 尾追式弹道示意图
1.2 诱饵运动位置坐标仿真模型
根据诱饵防御声自导鱼雷仿真模型,使用不同航速制分别进行仿真计算。
直航段,诱饵弹道的位置坐标计算可用式(1)表示:

式中,x(t)、y(t)为诱饵位置点坐标。
设t时刻诱饵开始变向,则t+dt时,旋转的角度为φ(t+dt)。
当 φ(t+dt)<0时,取 φ(t+dt)=0。
在t+ndt时刻,

式中,φ为声诱饵在dt内旋转的角度;转向标志的值为正时表示右转(顺时针),为负时表示左转(逆时针)。
2 诱饵对抗声自导鱼雷声学模型
2.1 对抗被动声自导鱼雷模型
主要手段是采用噪声模拟方式[5]:

式中,SLS为诱饵噪声模拟方式噪声源级;TL(RS)为声诱饵至鱼雷处的传播损失,RS为两者之间的距离;NL为鱼雷的背景噪声级;DI为鱼雷的指向性指数;DT为鱼雷的检测阈。
式(3)表明声诱饵产生的模拟辐射噪声传播至被动声自导鱼雷处,只要超过鱼雷被动通道接收机门限,则鱼雷将声诱饵视为攻击目标进行攻击。
2.2 对抗主动声自导鱼雷模型
诱饵通过应答来模拟目标反射特性,分两种情况。第一,诱饵接收到主动声脉冲后,按模拟一固定目标强度值计算出回波源级,然后按回波源级值附加一定的回波展宽,将信号发射出去,以此模拟一个运动的、有一定几何体积的、具有定常目标强度的潜艇目标,这种情况出现在回波源级不大于最大回波源级时(此时RS为中远距离)。这时,只需将诱饵看作具有定常目标强度TSS的声反射体即可[6],即

式中,SLE为敌鱼雷发射声源级;TSS为声诱饵模拟回波的目标强度。
式(4)表明声诱饵模拟回波信号传播至主动声自导鱼雷处,只要超过鱼雷主动通道接收机门限,则鱼雷将声诱饵视为攻击目标进行攻击。
第二种情况是回波源级大于最大回波源级时(此时RS通常为近距离,往往表明了诱饵已成功将鱼雷引开),这时,诱饵都以最大回波源级回发应答脉冲。对于这种情况,则要将式(4)中双程传播损失改为对诱饵应答脉冲的单程检测。即

式中,SLS-MAX为诱饵最大回波源级。
3 仿真程序的实现
根据所建立的模型,在Visual C++6.0仿真平台上完成潜艇使用声诱饵防御声自导鱼雷仿真程序设计。
3.1 声自导鱼雷仿真流程设计
对于声自导鱼雷而言,仿真程序一般用到三种声制导方式:被动声制导方式、主动声制导方式和主被动联合声制导方式。本文考虑到现代反鱼雷水声战的通常情况,将来袭鱼雷的声制导方式设置为主被动联合声制导方式。
仿真开始后,自导系统首先根据确定的参数在入水后,按预设定弹道航行,自导系统处于待命状态。自导系统在接收控制系统的开机指令后开始工作。在主被动联合声制导方式下,系统应确定是否采用被动优先导引方式,如果被动优先,则按照被动自导工作方式进行搜索,一旦确定被动捕获目标后,联合主动声制导方式进行目标检测与跟踪。如果不采用被动优先导引方式,系统按照主动声制导方式工作,在主动捕获时,考虑是否有被动目标特征以确定目标是否为真目标[7]。其流程图如图2所示。
图2 主被动联合声制导鱼雷仿真流程
3.2 诱饵仿真流程设计
诱饵仿真流程图如图3所示。程序启动后若声诱饵收到信号,则其进行信号分析与处理。然后选择不同的工作方式包括回波模拟方式、噪声模拟方式和联合工作方式,按照不同的工作方式进行回波频段选择和噪声频段选择,最终分别产生回波信号和噪声信号后输出,进行对声自导鱼雷的对抗。
图3 诱饵仿真流程
3.3 主程序仿真流程设计
潜艇使用诱饵防御声自导鱼雷主流程图如图4所示。当程序开始后,先对程序进行初始化,然后对参数进行设置。如果要将此次仿真数据保存,则调用数据存取模块。当程序开始运行后,鱼雷进入潜艇报警距离内时,给出报警信息,并进行对抗,包括释放对抗器材,潜艇进行规避。当对抗器材释放后,鱼雷将进行判断并对所确定目标进行追踪,如果判别其是假目标,则进入再搜索阶段。只有当鱼雷航程耗尽或者鱼雷与目标之间的距离达到一定的范围而判定鱼雷击中目标时,程序才可以结束。
如果要对以前保存的仿真数据进行演示,则在程序初始化以后,打开数据文件即可读入数据并进行演示。
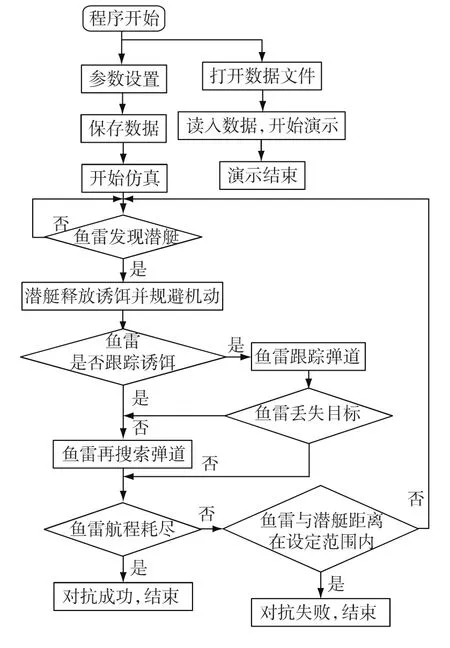
图4 主程序总体仿真流程
3.4 诱饵仿真软件的设计
诱饵仿真软件由参数设置模块、图形显示模块、数据处理模块和统计计算模块等组成。系统仿真模块流程图如图5所示。
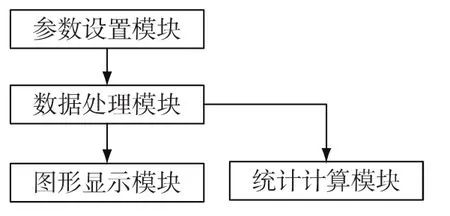
图5 系统仿真模块流程图
软件系统除图形显示外主要实现统计计算功能。统计计算可以设置计算机仿真计算的循环次数。统计开始后调用参数设置模块的对话框。
其中参数设置模块包括来袭鱼雷情况判断对话框(图6)和参数设定对话框(图7)。来袭鱼雷情况判断对话框主要完成来袭鱼雷数量的设置,鱼雷初始舷角的设定以及潜艇初始规避航向的选择;参数设定对话框需要完成潜艇、来袭鱼雷和诱饵的相关战术技术参数的设定。参数设定对话框的参数必须按照模拟对象真实的战术技术参数进行设定,以保证数据处理模块得到的所需处理的数据真实可靠,使得仿真的结果(图形显示和统计计算)真实有效。
数据处理模块主要涉及到将参数设置模块中的数据和接收到的其它数据通过各个函数模块的计算得到需要的数据应用于图形显示模块中进行水声对抗的演示以及应用于统计计算模块得到统计计算数据。数据处理模块中的计算主要包括环境因素对仿真过程影响的计算与判断,潜艇、鱼雷和诱饵运动要素的计算,各种对抗态势的判断和对抗方案,鱼雷、诱饵参数改变对仿真过程的影响等。
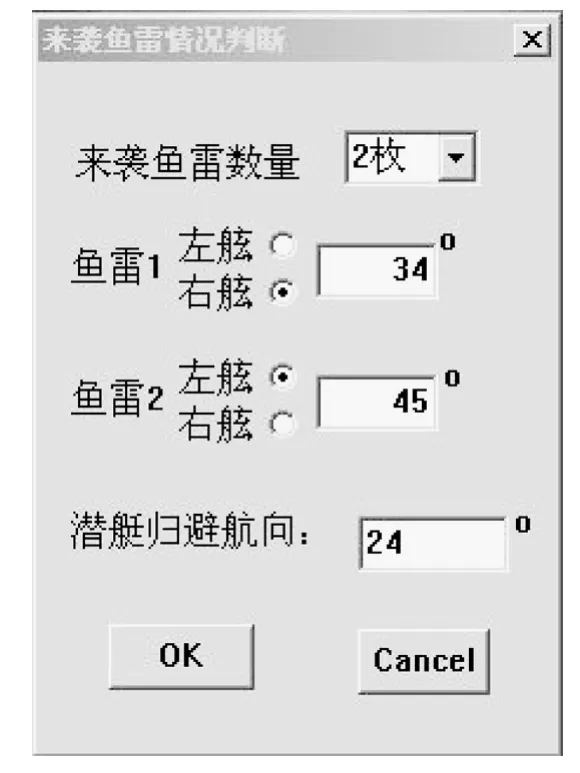
图6 来袭鱼雷情况判断对话框
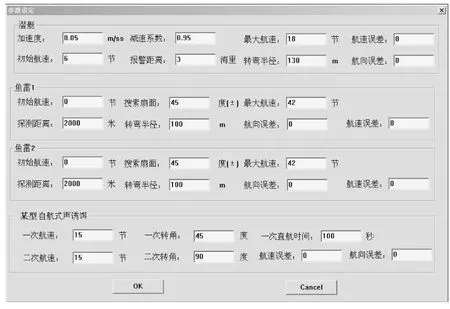
图7 参数设定对话框
图形显示模块除了包括潜艇防御鱼雷态势推演的图形界面之外还包括实时数据的表页显示,如图8所示。图形界面主要显示对抗过程中二维视图的潜艇、鱼雷和诱饵的航迹,能够清楚地表达出诱饵防御鱼雷、潜艇规避诱饵的对抗过程。态势表页显示可以实时反映出潜艇和鱼雷的参数变化情况,定量地刻画潜艇防御鱼雷的过程。
4 仿真结果及分析
仿真过程中考虑的诱饵弹道参数有诱饵的一次转角、一次航速、一次直航时间、二次转角和二次航速。其中诱饵在一次直航时间内航行的目的是进入鱼雷的搜索范围内,二次转向后的目的是尽快拉大鱼雷和潜艇之间的距离,最大可能地保证潜艇规避鱼雷成功。如果诱饵只是采用初始弹道后的一次转向弹道,则一次转向后诱饵需要兼顾进入鱼雷的搜索范围和拉大鱼雷和潜艇之间的距离两方面的作用。
在仿真过程中,分别设置鱼雷报警舷角为10°、30°、50°、70°、90°、110°、130°和 150°时,在 30cab、25 cab、20 cab和最小可防御鱼雷报警距离时,潜艇防御声自导鱼雷成功率的概率变化情况。由于鱼雷报警舷角具有对称性,所以只需研究其中某舷的来袭鱼雷,本节中仿真来袭鱼雷在左舷的情况,仿真图像中纵坐标表示潜艇防御鱼雷的成功率,横坐标表示诱饵一次转角的大小(“-”表示诱饵向左转向,“+”表示诱饵向右转向),诱饵的一次航速分别取VD1和VD2(VD1>VD2),其中鱼雷报警舷角为10°时仿真结果如图9和图10所示:

图8 态势演示图和态势显示对话框
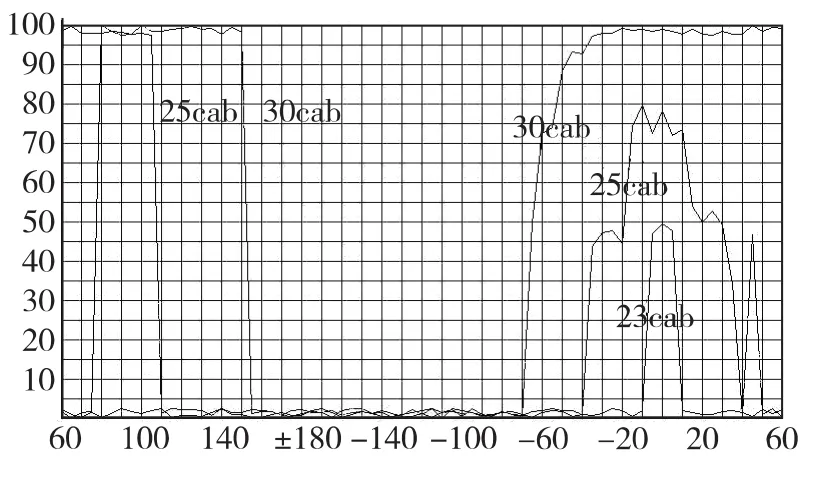
图9 鱼雷报警舷角为10°时诱饵一次航速为VD1的防御成功率

图10 鱼雷报警舷角为10°时诱饵一次航速为VD2的防御成功率
从鱼雷报警舷角为10°时声诱饵采取两种不同速制防御成功率分析图可以看出,当声诱饵采用高速制防御声自导鱼雷时,在30cab的报警距离上,可选择的一次转角为-70°~+150°,最小可防御鱼雷报警距离约为23cab;若采用低速制防御声自导鱼雷,在30cab的报警距离上,可选择的一次转角为-50°~+130°,最小可防御鱼雷报警距离约为26cab。可见在10°的鱼雷报警舷角时,诱饵采取高速制时其可选择的一次转角范围比采取低速制时要大,诱饵采取高速制时最小可防御鱼雷报警距离比采取低速制时要小。
综合鱼雷报警舷角为 10°、30°、50°、70°、90°、110°、130°和150°时的仿真结果可以看出,若诱饵选择使用的一次航速相同,鱼雷报警舷角相同,随着鱼雷报警距离的减小,潜艇防御鱼雷的成功率也随之减小,诱饵可选择的一次转角的范围也随之缩小;若诱饵选择使用的一次航速相同,鱼雷报警距离相同,随着鱼雷报警舷角的增大,潜艇防御鱼雷的成功率也随之增大,诱饵可选择的一次转角的范围也随之增大;鱼雷报警舷角相同且鱼雷报警距离相同时,诱饵选择高速制时的防御成功率比选择低速制时的成功率大,诱饵选择高速制时的最小可防御鱼雷报警距离比选择低速制的小,防御鱼雷报警舷角为大舷角的鱼雷的效果比小舷角的效果好。
利用仿真软件,除了可以分析诱饵的一次转角对潜艇防御声自导鱼雷成功率的影响之外,还可以分析诱饵二次转角的选择对潜艇防御鱼雷成功率的影响以及诱饵一次直航时间的确定方法。
5 结束语
本文主要通过计算机仿真包括鱼雷、诱饵和主程序的流程设计和仿真软件的设计,实现对潜艇使用诱饵防御声自导鱼雷的仿真分析。其中仿真需要最大限度地模拟了真实的作战环境,包括训练海区数据、海洋水声环境分析,生成兵力性能等。通过分析潜艇防御声自导鱼雷时诱饵弹道参数对潜艇防御鱼雷成功率的影响,将得到的结论与诱饵的战术使用相结合,可以得到潜艇使用诱饵防御声自导鱼雷时,选择诱饵一次转角弹道时诱饵的最佳一次转角,选择诱饵二次转角弹道时诱饵的最佳一次转角、二次转角和一次直航时间的确定依据等结论。
[1]夏佩伦,李本昌.潜用自航式声诱饵发展有关问题探讨[J].火力与指挥控制,2012,37(3):1-3.
[2]陈春玉.反鱼雷技术[M].北京:国防工业出版社,2006,38-46.
[3]于昌荣,苗艳.潜艇使用自航式声诱饵防御声自导鱼雷模型研究[J].指挥控制与仿真,2009,31(3):61-64.
[4]陈春玉,张静远,王明洲,等.反鱼雷技术[M].北京:国防工业出版社,2006.
[5]侯琳,胡波,章桂永.潜艇自航式声诱饵发射方向的仿真研究[J].计算机仿真,2009,26(6):23-25.
[6]孙光辉,黄文斌,梁犇.潜艇主动使用自航式声诱饵突破单舰搜索仿真研究[J].指挥控制与仿真,2010,32(5):59-62.
[7]成建波.潜艇采用软杀伤对抗鱼雷仿真系统设计[D].西安:西北工业大学,2003:32-37.