基于DSP 的磁悬浮永磁直线伺服系统的研究*
2014-04-23蓝益鹏刘宇菲
蓝益鹏 贺 伟 刘宇菲
(沈阳工业大学电气工程学院,辽宁 沈阳 110870)
直线伺服系统在数控机床中的应用,消除了传统机械传动链带来的一系列不良影响,然而在数控机床加工过程中的摩擦阻力,特别是在低速时的非线性摩擦不可避免地影响伺服系统的精度,导致进给系统产生爬行以及造成反向死区。磁悬浮永磁直线伺服系统因其具有非接触,无摩擦,无磨损等特点,在数控机床领域中具有广泛的应用前景[1-4]。
磁悬浮永磁直线电动机控制系统为一个多变量,高耦合,非线性的系统,因此要得到好的控制性能,必须进行磁场解耦,这其中需要大量复杂的数学运算。而数字信号处理器(DSP)的高速数据处理能力能很好地完成这一任务,也符合实时控制的要求[5-7]。数字控制系统控制简单,有较高的分辨率,运行可靠,无温度漂移,动态响应快。除完成控制外,还具有保护,故障监视,自诊断以及和上位管理机通信等功能[8-9]。
本文在建立磁悬浮永磁直线伺服系统的数学模型基础上,设计了以TMS320LF 2812 为主控CPU,采用SVPWM 控制技术,结合硬件电路,对该系统进行软硬件设计及实验研究,得到了电动机运行中相关量的实验波形,实现了对磁悬浮永磁直线电动机的控制。
1 磁悬浮永磁直线伺服系统的数学模型
磁悬浮永磁直线同步电动机的特殊性在于其动子上存在两套绕组,如图1。电动机本来就具有很强的电磁耦合,增加悬浮绕组使直线电动机的电磁关系和数学模型更加复杂,则要分析磁悬浮永磁直线伺服系统的数学模型,必须对两套绕组进行解耦处理[10]。
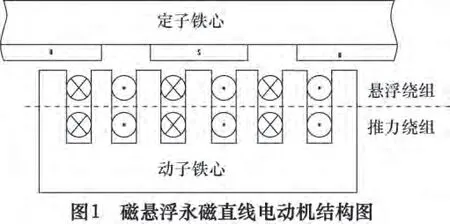
为了实现两套绕组的解耦控制,使在d -q 坐标下推力绕组电流产生的全部磁链在q 轴方向上,悬浮绕组电流产生磁链全部在d 轴方向上与永磁体磁场一致,消除两套绕组之间的磁链耦合。
由图2 可知,悬浮绕组产生磁动势在相位上与推力绕组产生磁动势相差90,两套绕组之间不存在耦合,实现了两套绕组间的解耦控制。则解耦后的磁悬浮永磁直线伺服系统的电压和磁链方程为:



其中:ud、uq、id、iq、Ld、Lq、ψd、ψq分别为d -q 坐标系下动子电压、电流、电感和磁链;ψf为永磁体基波励磁磁链,Rs为动子电阻,v 为动子线速度,np为极对数,τ 为极矩。动子电磁转矩表达式为:

由上式可知,由于定子磁链幅值恒定不变,动子电流在d-q 坐标系下的分量决定磁悬浮永磁直线电动机的电磁转矩。
2 系统硬件结构及软件设计
2.1 硬件结构
图3 为磁悬浮永磁直线伺服系统的系统硬件框图。硬件设计主要包括主电路和控制电路。主电路是由整流、滤波以及IPM 智能功率模块构成。控制电路是以芯片DSP TMS320F2812 为核心,其中还包括位置检测电路、电流检测电路和故障诊断电路等。

控制电路中的DSP2812 最小系统主要由电源、DSP 芯片、晶振、RAM 及I/O 管脚组成。系统通过JTAG 接口和仿真器连接实现编程调试。在最小系统中,Flash 编程电压是3.3 V,主频为150 MHz,同时还有多达128 kBit×16 位的Flash 存储器以及两个时间管理器EVA 和EVB,它们能捕获位置信号,产生可调死区的各种PWM 波形。
2.2 系统软件设计
系统软件主要包括主程序、系统初始化程序、起始定位子程序、定时器中断子程序、A/D 电流采样子程序、电流和速度的PI 调节、SVPWM 波形产生子程序和外部中断子程序等。
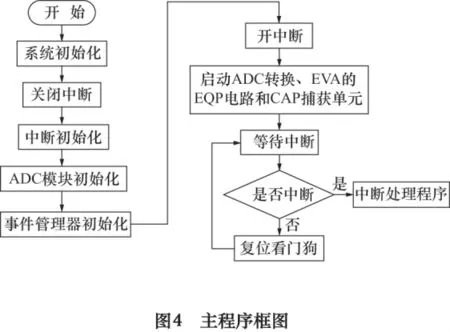
主程序框图如图4 所示,主要实现以下功能:(1)系统初始化:DSP 内核初始化、中断初始化、ADC 初始化及启动、事件管理器初始化、电动机动子的初始位置参数初始化。(2)位置初始化:电动机的动子进行初始定位,开中断并启动事件管理器。(3)若有中断到来,则执行相应的中断服务子程序。
中断服务子程序主要包括电流大小的计算、速度位置信息和矢量变换组成。
3 实验结果与分析
磁悬浮永磁直线电动机及其伺服系统如图5 所示,它包括了自行设计的磁悬浮永磁直线电动机和实验研究所需的硬件电路。

3.1 SVPWM 的驱动信号和反电动势波形
从DSP 输出的6 路PWM 波分别控制IPM 的6 个功率开关管,从数字示波器测得的PWM1 和PWM4 波形如图6 所示。PWM 信号的周期为50 μs,幅值3.3 V。
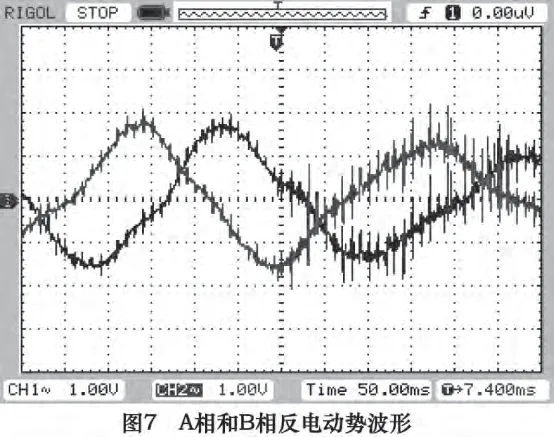
图7 为A 相和B 相反电动势波形,图中波形幅值逐渐减小为电动机减速过程。
3.2 光栅尺输出信号波形
直线伺服控制系统位置测量采用的是长光栅尺传感器,作为位移、速度与磁极位置测量元件,安装在电动机的辅助导轨之间。图8 和图9 分别为电动机正向和反向运行时,光栅尺输出信号波形。
由图8 和图9 可以看出,虽然光栅尺的波形有一些毛刺,但高低电平间转换延迟时间很短,相位差也足以让鉴相器识别,所以效果比较理想。



3.3 相电压和线电压波形
速度参考值对应的PU(per unit)值为:Speedref=0.1,对应于0.8 Hz,周期1.25 s,速度为105.6 mm/s。直流母线电压Ud=80 V。对直流中性点o'的相电压U'a0,U'bo波形。相电压只有±Ud/2 两个电平,即+40 V,-40 V,见图10。

对电动机中性点N 的相电压UaN、UbN波形,有±Ud/3、±2Ud/3 和0 五个电平,见图11。
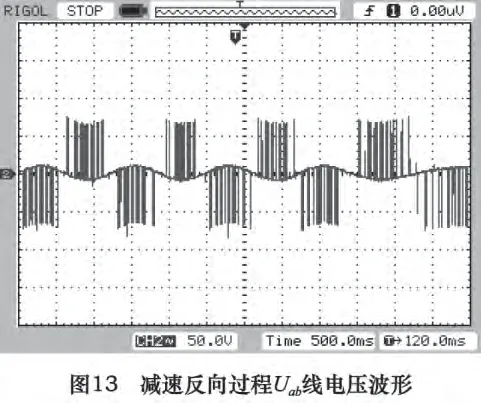
Uab=U'a0-U'bo,Uab线电压波形只有± Ud和0这3 个电平,见图12~13。图13 中,宽的地方是减速反向过程。

4 结语
本文以磁悬浮永磁直线同步电动机为研究对象,研究了基于DSP 的直线伺服系统的软硬件设计方法:
(1)将矢量控制分别应用于电动机的两套绕组,实现推力与悬浮力的解耦。建立了磁悬浮永磁直线伺服系统的数学模型。
(2)设计了基于智能功率模块构成的磁悬浮永磁直线伺服系统的主电路,以及伺服系统的控制软件。
(3)对磁悬浮永磁直线伺服系统进行了实验研究,实验所得波形验证了系统控制方案合理,实现了对磁悬浮永磁直线伺服系统的精确控制。因此,基于DSP 的磁悬浮永磁直线伺服控制系统的研究具有理论意义和实用价值。

[1]杨建武.国内外数控技术的发展现状与趋势[J].制造技术与机床,2008(12):57 -62.
[2]卢琴芬,叶云岳.混合励磁直线同步电动机的磁场推力[J].中国电机工程学报,2005,25(10):127 -130.
[3]叶云岳.直线电机原理与应用[M].北京:机械工业出版社,2000.
[4]田录林,张靠社,王德意,等.永磁导轨悬浮和导向磁力研究[J].中国电机工程学报,2008,28(21);135 -139.
[5]韩安太,刘峙飞,黄海.DSP 控制原理及其在运动控制系统中的应用[M].北京:清华大学出版社,2004.
[6]董砚,包志远,孙鹤旭,等.基于DSP 的PMSM 步进控制的数学实现[J].微机算机信息,2005(7):80 -82.
[7]夏加宽,张琳娜,孙宜标,等.直线电机XY 平台交叉耦合迭代学习控制[J].沈阳工业大学学报,2013,35(1):1 -5.
[8]刑杰.基于DSP 的全数字交流伺服驱动器设计[J].机械管理开发,2005(4):59 -60.
[9]周卫平,吴正国,唐劲松,等.SVPWM 的等效算法及SVPWM 与SPWM 的本质联系[J].中国电机工程学报,2006,26(2):133 -137.
[10]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997.
