带落角约束的圆弧比例导引律和偏置比例导引律的研究
2014-04-19宋建梅
周 鲁,宋建梅,黄 岚
(飞行器动力学与控制教育部重点实验室,北京理工大学宇航学院,北京100081)
带落角约束的圆弧比例导引律和偏置比例导引律的研究
周 鲁,宋建梅,黄 岚
(飞行器动力学与控制教育部重点实验室,北京理工大学宇航学院,北京100081)
摘 要:为了实现导弹以一定落角命中目标,研究了两种带有落角约束的圆弧比例导引律和偏置比例导引律。首先建立弹目相对运动数学模型和框架动力学数学模型,然后阐述了两种导引律的基本原理,接着对导弹在三维空间内攻击静止与运动目标进行数学仿真试验,仿真实验证明两种导引律都能以较小的脱靶量和期望落角命中目标,最后从原理上和仿真实验上对两种导引律进行了对比研究。
关键词:圆弧制导;偏置比例导引;落角约束
0 引言
比例导引律形式简单,技术上易于实现,其弹道比较平直,能对付机动目标,并且导引精度高,所以被广泛应用[1-3]。然而很多导弹在命中目标时,不仅希望得到较小的脱靶量,还希望导弹能够以最佳角度命中目标,以发挥战斗部的最大效能,实现最佳毁伤。比如当目标为重装甲的坦克或者携带危险载荷的飞行器时,导弹击中目标的角度就显得尤为重要。Kim Grider[4]首先对落角约束比例导引开展了研究,此后很多学者在不同的应用背景下,提出了多种具有落角约束的导引律[5]。迄今为止,研究较为广泛的导引律有三类:一类是跟踪某条特殊轨迹来控制末速度方向的几何曲线导引律,例如圆弧导引律[6-8];另一类是在传统比例导引律的基础上进行改进,例如变系数比例导引律和添加一个时变偏置项的偏置比例导引律[9];第三类是以现代滑模变结构理论为基础的变结构比例导引律[10]。
本文基于半捷联寻的制导系统对圆弧比例导引律和偏置比例导引律进行研究,把俯仰平面内的落角约束扩展到三维空间中的命中速度方向约束。本文首先介绍了相关坐标系和它们之间的转换关系,并建立了半捷联寻的制导系统数学模型;然后给出了圆弧比例导引律和偏置比例导引律和推导过程,从机理和使用两方面对两种导引律进行了对比。最后以导弹攻击三维空间内的地面静止目标和低速运动目标为例,对两种导引律数学仿真试验,从弹道、法向过载、落角误差、脱靶量等方面进行了比较。
1 相关坐标系的定义和转换
1)地面坐标系Axiyizi:地面坐标系是与地球表面固连的坐标系。坐标系原点A选取在导弹初始位置的质心处;Axi轴指向可以是任意的,Ayi轴位于包含Axi轴的铅垂面内,垂直于Axi轴,向上为正,Azi轴与其它两轴构成右手坐标系。
2)弹体坐标系Oxbybzb:坐标系的原点O取在导弹的质心上;Oxb轴与导弹纵轴重合,指向头部为正;Oyb轴位于导弹纵向对称面内垂直于Oxb轴,向上为正;Ozb轴与其他两轴构成右手坐标系。
3)外框坐标系Oxg1yg1zg1:原点O取在探测器中心,由于本文采用的弹体为质点模型,因此探测器中心即为弹体质心,Oxg1垂直于外框架平面,指向目标方向为正,Oyg1轴与弹体坐标系Ayb轴重合,Ozg1轴位于弹体坐标系Oxbzb平面内,与其他两轴构成右手坐标系。
4)内框坐标系Oxgygzg:原点O取在探测器中心,Oxg轴与光轴指向相同,指向目标方向为正,Ozg轴与外框坐标系Ozg1轴重合,Oyg轴在外框坐标系Oxg1yg1平面内,与其他两轴构成右手坐标系。内框坐标系又称为光轴坐标系。
图1 导引头几何示意图Fig.1 Geometry of the seeker
弹体坐标系绕Oyb轴旋转λy角,便可得到外框坐标系,则弹体坐标系到外框坐标系的转换矩阵Tb→g1为:
外框坐标系绕Ozo轴旋转λz角,便可得到内框坐标系,则外框坐标系到内框坐标系的转换矩阵Tg1→g为:
则弹体坐标系到内框坐标系的转换矩阵Tb→g为:
地面坐标系到弹体坐标系的转换矩阵Ti→b为:
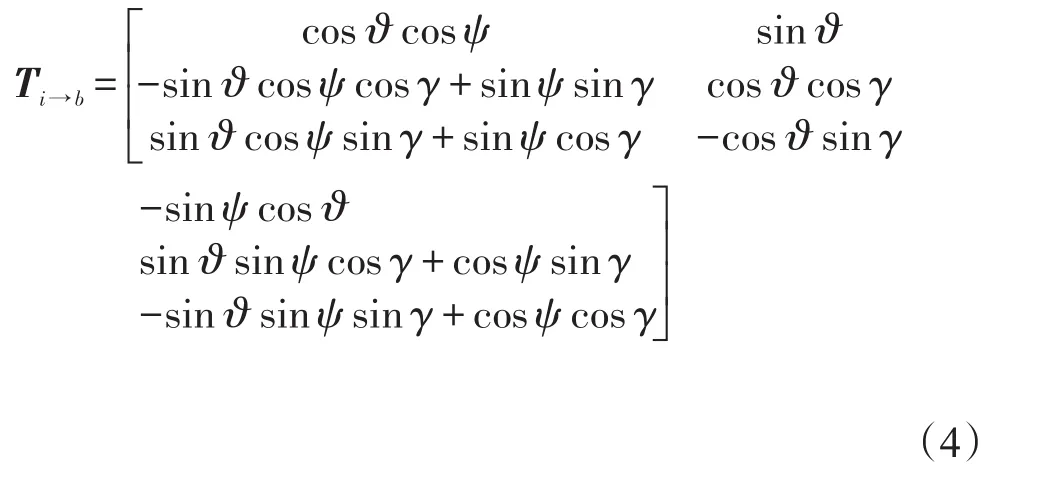
式中,ϑ,ψ,γ分别为弹体俯仰角、偏航角与滚转角。
2 弹目相对运动数学模型和框架动力学
2.1弹目相对运动数学模型
在惯性系下建立弹目相对运动模型如下:

其中:

式中XR(t)∈R3为弹目相对位置,VM(t)∈R3为导弹的速度,VT(t)∈R3为目标的速度。 uc是导弹法向加速度指令,满足如下约束:

2.2半捷联寻的制导系统框架动力学模型
本文假设导引头框架动力学模型如下所示:
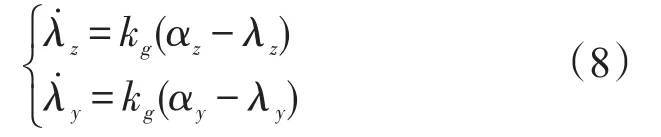
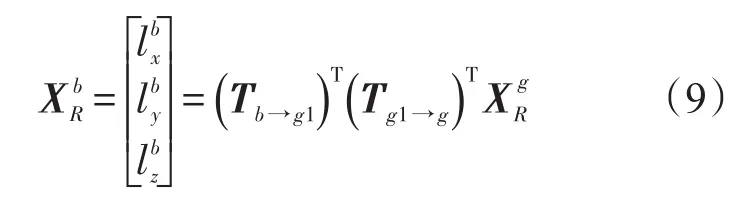
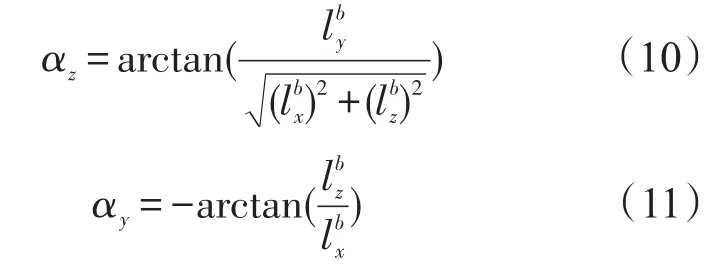
式(8)中kg为常数,αz和αy为视觉传感器的光轴需要转动的俯仰角和偏航角,设为弹目相对位置在弹体坐标系下的投影,αz为与弹体系Oxbzb平面间的夹角,指向Oxbzb平面上方时αz为正,反之为负;αy为在Oxbzb平面内的投影与Oxb轴之间的夹角,迎Oyb轴俯视,若其投影位于Oxb轴左侧,则αy为正,反之为负。将框架坐标系下的弹目视线转化到弹体坐标系下可得:
则αz与αy的计算公式为:
2.3导弹自动驾驶仪数学模型
假设自动驾驶仪为一阶惯性环节,uc为导弹法向加速度指令, aM为导弹实际加速度,ρA=1TA,TA为一阶惯性环节的时间常数,其动力学方程为:

3 圆弧导引律(CNG)
为了更好地阐述问题,定义运算符a|b为a在 b 方向上的投影,a|b⊥为a在b垂直方向上的投影。angle(a,b)表示a与b之间的夹角。
定义VD为导弹当前期望速度,VF为导弹最终期望的命中速度,VD和VF关于XR对称,如图2所示。ε表示VF与XR之间的夹角,λ表示VM与XR之间的夹角, fT表示视线角速度,eλ为VM和VD之间的夹角。假设目标固定,若能保证ε和λ严格相等,即VM与VD一致,那么导弹会以一个唯一确定的圆弧轨迹飞向目标,并以期望速度方向击中目标[6]。
图2 圆弧导引律示意图Fig.2 Geometry of the CNG

式中:
kp为比例系数,为在惯性坐标系下从摄像机光心指向目标成像点中心的向量,ud1,ud2为单位向量表示方向,式(13)中等号右边第一项使VM转向VD,第二项使导弹以圆弧轨迹逼近目标。
从圆弧导引律推导过程可以看出,圆弧导引律由两部分项组成:第一部分是比例导引项,其作用是使导弹以较小的脱靶量命中目标;第二部分是导弹速度方向修正项,其作用是减小导弹当前速度方向与当前期望速度方向的偏差,使导弹最终以期望的角度命中目标。该导引律的主要优点是不需要知道弹目相对距离信息,只需要知道弹目视线的方向即可。
4 偏置比例导引律(BPNG)
BPNG的控制量由如下两部分组成:

式(14)中η为设定的一个常数增益,ε为VF和 XR之间的夹角,λ为VM和 XR之间的夹角,N为一个时变增益,即:
其中ρ为目标速度大小与导弹速度大小的比值,α和N'为设定的常数。由于比例导引项的作用是通过视线角速率信息使导弹命中目标,那么该控制量的方向ud1为:
偏置项的作用是修正导弹当前速度VM与弹目视线XR之间的夹角误差ε,从而使导弹以期望的着角打击目标,所以偏置项的控制量方向ud2为:

可见,偏置比例导引律是将传统的比例导引系数改进为时变系数,同时添加了一个时变的偏置项,其作用是通过消除导弹速度与弹目视线方向之间的偏差来实现落角约束。偏置比例导引律与圆弧比例导引律的主要不同之处在于,偏置比例导引律需要知道弹目相对距离信息。
5 仿真验证
5.1攻击地面静止目标
本节以导弹打击三维空间内地面静止目标为例,分别采用圆弧比例导引律和偏置比例导引律进行仿真实验。假设导弹期望的命中速度方向为,即俯仰方向落角50.8°,偏航方向落角45°,自动驾驶仪时间常数TA=0.2s,框架角控制 器 增 益 kg=20, BPNG导 引参 数 为α=0.28,η=1.3,N'=2.9,圆弧比例导引律的导引参数kp=‖VM‖。仿真初始条件如表1所示。基于以上仿真条件得到的导弹各特征变量曲线如图3~图8所示。
表1 打击地面静止目标的系统初始状态Tab.1 The initial state of system against ground target
图3 俯仰平面弹道曲线Fig.3 Trajectories in the pitch plane
图4 偏航平面弹道曲线Fig.4 Trajectories in the yaw plane
图5 俯仰方向加速度Fig.5 Acceleration in the pitch plane
图6 偏航方向加速度Fig.6 Acceleration in the yaw plane
图7 俯仰落角曲线图Fig.7 Attack angle in the pitch plane
图8 偏航着角曲线图Fig.8 Attack angle in the yaw plane
由以上仿真结果可以看出,偏置比例导引律的弹道比圆弧导引律的弹道较平直。从过载上看,圆弧比例制导所需要的法向过载比偏置比例导引律较小,而且在末段偏置比例导引律的需用过载会急剧增加,在实际应用中会由于过载约束对制导精度产生影响。从制导精度上看偏置比例导引律的脱靶量为0.11m,俯仰方向的落角误差为0.01°,偏航方向的着角误差为0.02°;而圆弧导引律的脱靶量为1.11m,俯仰方向的落角误差为0.72°,偏航方向的着角误差为0.90°。
5.2攻击地面运动目标
本小节假设目标在地面上以15m/s的速度沿x轴运动,其余仿真条件与5.1节相同。根据以上仿真条件得到的弹道曲线、过载曲线、VM与VF的夹角曲线分别如图9~图14所示。
图9 俯仰平面弹道曲线Fig.9 Trajectories in the pitch plane
图10 偏航平面弹道曲线Fig.10 Trajectories in the yaw plane
图11 俯仰方向加速度Fig.11 Acceleration in the pitch plane
图12 偏航方向加速度Fig.12 Acceleration in the yaw plane

图13 俯仰落角曲线图Fig.13 Attack angle in the pitch plane
图14 偏航着角曲线Fig.14 Attack angle in the yaw plane
根据以上仿真结果可以看出,偏置比例导引律的脱靶量为0.04m,俯仰方向的落角误差为1.6°,偏航方向的着角误差为3.1°。圆弧导引律的脱靶量为0.20m,俯仰方向的落角误差为1.34°,偏航方向的着角误差为6.17°。结合算例5.1,可以看出目标机动性对于圆弧比例导引律在精度上有很大的影响,而对偏置比例导引律的影响较小。
6 结论
本文针对半捷联寻的制导系统,进行了带落角约束的偏置比例导引律和圆弧比例导引律研究。研究表明,两种导引律都能以较小的脱靶量和期望落角命中目标,其中圆弧比例导引律通过视觉导引头提供的弹目视线方位信息来实现落角约束,弹目相对方位信息可通过成像平面中的目标成像位置间接获取;偏置比例导引律则通过添加时变的偏置项来实现落角约束,需要已知弹目相对距离信息,但是半捷联寻的制导系统不能提供此信息,只能通过其他方法获取或者大致估算。从导弹三维空间内打击目标的数学仿真可以看出:对于静止目标,两种导引律都能以很小的脱靶量和很高的落角精度命中目标;对于机动目标,目标的机动性对圆弧比例导引律的落角精度产生较大的影响,而对偏置比例导引律影响较小。从过载上看,偏置比例导引律需要的过载较大,并且在导引末端所需过载急剧增加,使得在实际情况中由于过载的约束会对脱靶量和落角精度产生影响。因此在实际情况中CNG比BPNG有更好的鲁棒性,并且更便于在被动寻的制导系统上实现。
7 致谢
本项目由兵科院预研基金(9140A01010313B Q01002)支持,同时也感谢审稿人在提高论文质量上提出的宝贵意见。
参考文献
[1]Murtaugh S A,Criel H E.Fundamentals of proportional navigation[C].IEEE Spectrum.1969,3:75-85.
[2]Guelman M.Proportional navigation with a maneuvering target[C].IEEE Transactions on Aerospace and Electronic Systems.1972,8:364-371.
[3]Yuan P J,and Hsu S C.Solutions of generalized proportional navigation with maneuvering and non-maneuvering targets[C].IEEE Transactions on Aerospace and Electronic Systems.1995,31:469-474.
[4]Kim M,Grider,K V.Terminal guidance for impact attitude angle constrained flight trajectories[C].IEEE Transactions onAerospace and Electronic Systems.1973,9(6): 852-859.
[5]蔡洪,胡正东,曹渊.具有终端角度约束的导引律综述[M].宇航学报.2010,31(2):315-323.
[6]Anchester I R,Savkin A V.Circular navigation guidance law for precision missile target engagements[M].Journal of Guidance.Control,and Dynamics.2006,29(2): 314-320.
[7]Manchester I R,Savkin A V.Circular navigation guidance law with incomplete information and uncertain autopilot model[M].Journal of Guidance,Control,and Dynamics.2004,27(8):1078-1083.
[8]Song T L,Shin J S,Han H S.Impact angle control for planar engagements[C].IEEE Transactions on Aerospace and Electronic Systems.1999,35(4):1439-1444.
[9]Kim B S,Lee G L,Han H S.Biased PNG law for impact with angular constraint[C].IEEE Transactions on Aerospace and Electronic Systems.1998,34(1):277-288.
[10] 李志平,郭建国,周军.基于终端角度约束的滑模制导律设计[M].飞行力学,2012,30(4):345-348.
中图分类号:TJ765.3
文献标志码:A
文章编号:2095-8110(2014)03-0011-07
收稿日期:2014–06–19;
修订日期:2014–10–09。
基金项目:兵科院预研基金(9140A01010313BQ01002)
作者简介:周鲁(1990–),男,硕士,主要从事基于视觉信息的飞行器制导与控制系统设计。E-mail:47707550@qq.com
Research on Circular Navigation Guidance Law and Biased Proportional Navigation Guidannccee Law with Impact Angle Constraiinntt
ZHOU Lu,SONG Jian-mei,HUANG Lan
(Key Laboratory of Dynamics and Control of Flight Vehicle,Ministry of Education,School ofAerospace Engineering,Beijing Institute of Technology,Beijing 100081,China)
Abstract:In order to intercept against a target with a certain impact angle,we study two angle constraint guidance laws called circular navigation guidance(CNG)and biased proportional navigation guidance(BPNG).Firstly we establish the relative motion dynamic model and the gimbaled dynamic model.Then we explain the basic principles of the two guidance laws and use computer simulations to test three-dimensional intercepts against a moving or stationary target.We prove that the two guidance laws have been shown to give perfect results in miss distance and desired impact angle.Finally we present a comparative research of the two guidance laws on principle and simulation experiment.
Key words:Circular navigation guidance;Biased proportional navigation guidance;Impact angle constraint
