用动态冲击压入法测定橡胶的压力松弛
2014-04-14江畹兰编译
江畹兰 编译
(华南理工大学材料学院, 广东 广州 510641)
用动态冲击压入法测定橡胶的压力松弛
江畹兰 编译
(华南理工大学材料学院, 广东 广州 510641)
摘要:论述了用动态冲击压入法测定橡胶的应力松弛。该测试装置可在宽域的温度范围内(从-160℃到+100℃)进行测试,所得结果与用其它方法获得的结果相似。
关键词:应力松弛;橡胶;动态冲击压入法;应力松弛谱
在评估聚合物材料,特别是弹性体的使用性能时,分析松弛关系曲线及建立松弛时间谱图有重要的作用[1]。松弛关系曲线可用来正确选择在不同条件下使用的材料,而确定材料在工作过程中其松弛时间谱图的变化特性及力学特性,可评估材料的老化程度,并预测其使用寿命[2]。
目前,在研究中常采用应力松弛曲线(弹性模量E随时间t的变化曲线)来评估在不同时间的机械作用下聚合物的性能。在极短促的时间内,模量为0.1~10 GPa,而在长时间作用(几秒以上)下,模量值达0.1~50 MPa。聚合物制品在使用过程中,既受到静态负荷的作用,又要承受动态负荷。因此,为了客观地进行评估,必须要掌握在宽域的时间范围内有关聚合物性能的信息。然而,目前大多数企业中使用的仪器和设备(硬度计、拉力机等)只能评估材料静态测量中较短时间里的性能。有鉴于此,人们研发了一种既简单又可靠的设备及相应的测试方法,用来评估在黏弹区及玻璃态(在较短的时间作用下)下的松弛特性。
动态压入法是在较短作用时间内便可获得聚合物特性的一种方法[3]。该方法是将刚性的压锤冲击力作用于材料上,并记录压锤的压入过程。利用此方法,不仅可以得到有关冲击的最终参数(压锤压入材料的最大压入量、回弹速度等等),并且还能描绘出接触应力与压入量的相关性曲线。该曲线与应力-形变图相似。这一条相关性曲线是有关材料信息数据的主要来源,且能最完整地反映材料的性能[4]。
试验在ИMПУЛЬC-TA装置上进行。该装置可在较宽域的温度范围内(-160 ℃~100 ℃),以不同的冲击速度进行测定。装置的主要部份是恒温室,其中安装有压锤移动机构和固定材料试样用的平台。借助于电磁系统,赋予压锤一定大小的冲击力。电磁系统可产生使压锤加速或减速的磁场。压锤压入速度的计算由电子计算机完成。
在此方法中,材料性能的原始数据是压锤在与材料接触时其位移的速度V(t)[4]。速度V(t)经微分处理并乘以压锤的质量m,可得到即时接触应力值P(t);经积分后则可得到压入深度,即位移值h(t)及相应的P(h)相关性曲线(见图1)。
为了描述在冲击负荷作用下聚合物的性状,采用了Weichert模型[1]。它是由一个弹性单元和几个马克斯威尔分支单元并联而成的。根据对这一模型的研究,即时t的弹性模量E(t)可用平衡弹性模量E∞和松弛模量Er之和的形式表示:式中,τ—松弛时间。

在起始瞬间,当t=0时,松弛尚未开始,弹性模量相当于玻璃态:

然后,随着时间推移,材料中松弛开始发展。当t比τ值大得多时,式(1)中第一指数实际上为零。以后,随着时间进一步推移,第二指数也为零。当n→∞时,非连续松弛时间谱图转变为连续的,式(1)变为下式:

实践证明,绘制松弛谱图使用对数时间坐标比较方便。由此,引入松弛时间分布函数H(τ)概念[5]。此时乘积H(τ)dlnτ表征松弛的贡献,它与处于lnτ与lnτ+dlnτ之间的松弛时间有关,而松弛模量可用如下方程式表示:

式(4)给出了聚合物松弛行为的时间概念,但未揭示个别松弛机理对松弛总过程的影响。而H(τ)却反映了松弛转变时个别松弛机理的贡献。因此,对研究者来说,连续松弛时间谱图H(τ)更有意义。
填充活性炭黑的交联弹性体的典型松弛时间谱图lgH(τ)要在10-10s到1010s的时间范围内[1],仅用某一装置求得如此宽广的松弛谱图是很复杂的。通常是分别得到快速松弛过程的松弛谱图和缓慢松弛过渡的松弛谱图[6、7]。采用上述动态冲击法,仅可得到快速松弛过程的信息。考虑到冲击过程中延续的时间(约1 ms)及可靠记录冲击过程的可能性,相应于α-松弛过程的时间为10 μs[7]。填充弹性体的冲击过程也包括了α'-过程的起始阶段。α'-过程是由于含有活性填料的弹性体大分子补充吸附键的松弛所引起的。
图1为冲击时压锤压入的深度(位移)与接触力的相关性曲线。在冲击有效阶段,压入的深度增加,如图中标明的1、2、3……B点,B点对应于冲击有效阶段结束,压锤深入物料。曲线上每一点都有自己对应的时间区间,如t1、t2、t3或tact等。一般认为,研究物料固有的松弛过程,都随冲击开始而同步展开,弹性模量在形变开始时呈最大值E(0),随后,在标出的每个点上逐渐减小。如确认冲击有效阶段的每个点都归属于弹性冲击曲线。弹性冲击可由以下盖茨(гepц)方程式描述:

式中:R—球形压锤顶部半径;υ-泊松系数(0.5)。
上式未曾考虑物料受力的程序,而只是考虑了开始施加负荷的时间,且在任一冲击时刻盖茨(гepц)弹性定律都有效。弹性模量值则由相应的点,在相应时刻的接触力和冲击深度决定之。
图1列示了通过1、2、3及B点的P~Eh3/2盖茨(гepц)曲线。由通过B点的盖茨(гepц)曲线测定的弹性模量为动态模量Ed[8],它与具体的时间,即有效冲击时间tact相对应,便于应用在分析冲击过程的相应物理模型中[8]。
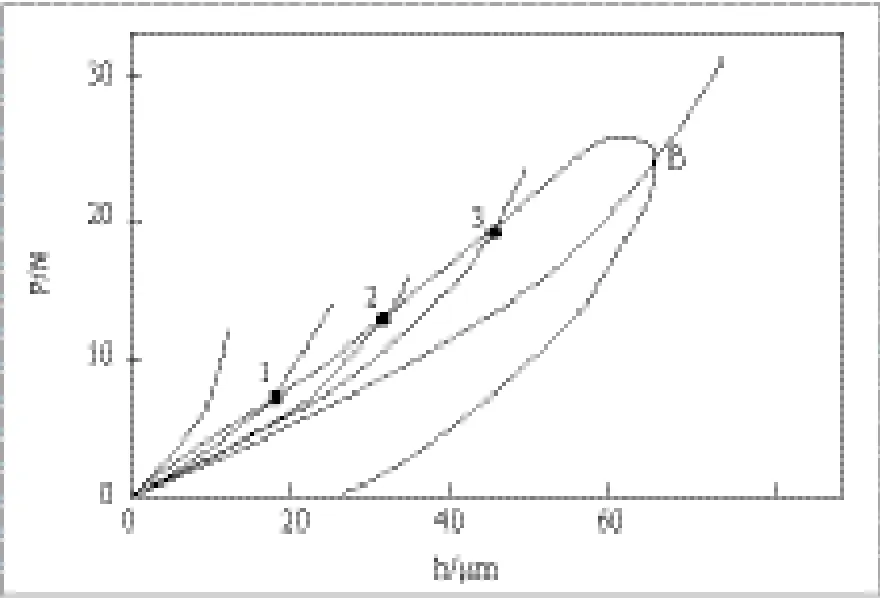
图1 动态压入时绘制的典型的接触力—位移相关性曲线
图2为由7-ИPП-1352橡胶试样以不同的预先设定的冲击速度Vo,和以相应的不同负荷程序压入时所得的E=f(lgt)典型的相关性曲线。由图2可见,所有相关性曲线的数据极为相近,实际上把它们汇合在一起,可用一条平均的相关性曲线来描绘。这就证明了在所研究的速度范围内(0.2~1 m/s)实施动态压入时 ,当接触区单值增大,对模量影响最大的因素是施加负荷的时间,而负荷程序的影响不很明显。变形对模量也无影响。在图2上标明了与同一压入值(h=0.126 mm)相对应的各个点。显而易见,所有这些点对于平均曲线来说,具有极大的可信度。
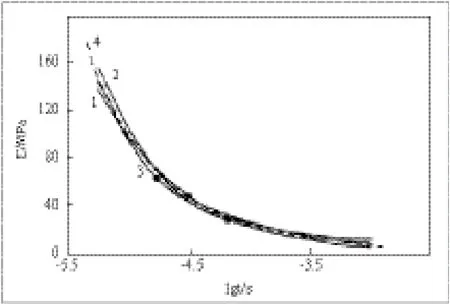
图2 在设定的冲击速度下的E(lgt)相关性曲线
图3为根据式5绘制的具有不同邵氏A硬度的橡胶,和不同温度下橡胶7-B-14的松弛关系曲线E(t)(以对数座标形式表示)图。这些松弛曲线的时间跨度从10微秒(MKC)到1毫秒(MC)。需要指出的是,当温度处于-13 ℃~+20 ℃这一范围内时,曲线具有单值特性;而当温度为+85 ℃时,曲线上出现了向平衡高弹态指数过渡的特征。图3中这些曲线上标明的非连续点,相当于冲击的有效阶段结束。此时,压入深度的增加,被压锤离开时的形变恢复所代替,且形变机制也发生了变化(接触区域开始减小)。由于弹性体的实际应力松弛曲线不是由一个松弛时段决定的,而是包括了连续的松弛谱图,故在所观察的时段内得到的实验曲线E(t),与规范的指数曲线的形状有所不同。
松弛曲线最大程度地反映出有关弹性体结构的信息。谱图起点为冲击压入,反映了弹性体的微观结构[9]。因此,按一次冲击结果绘制的松弛曲线,对开发具有既定性能的新材料具有很大的意义。按图3中的数据可以绘制出此种松弛谱图。松弛谱图或连续松弛时间谱图H(τ)(τ为在所研究的时间节点上,与分子基体某些结构单元重组有关的松弛时间)[1]由AIфpeй方程式测定。


图3 弹性模量松弛曲线图
曲线上O点—冲击有效阶段结束。
图4为微分处理的结果。将所得结果与用其它方法所得相关性曲线进行比较后可知,它们在定性方面具有良好的一致性,具体表现在曲线变化的特性和数值顺序上。
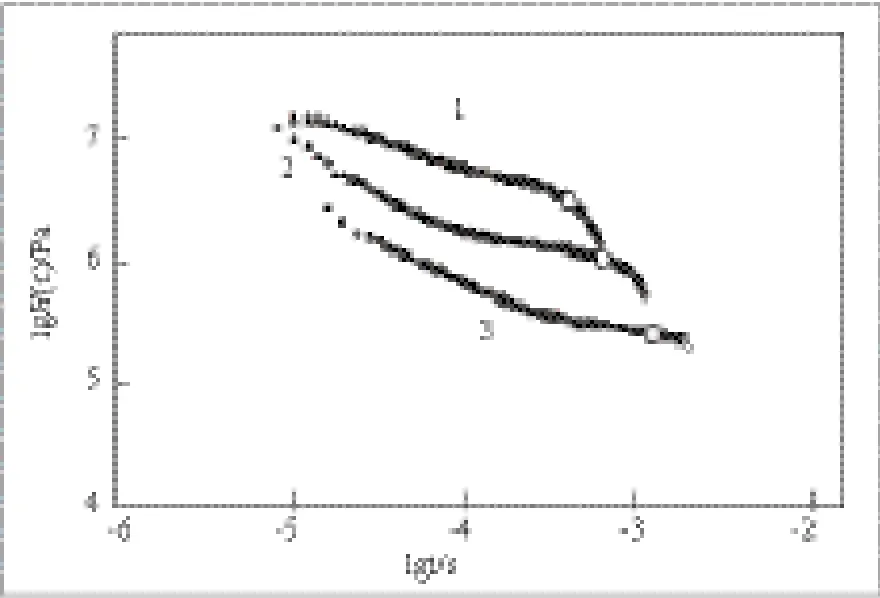
图4 按图3中数据绘制的松弛谱图(说明见图3)
综上所述,研究结果表明,文中所提出的方法及装置,可以记录冲击过程的时间内弹性模量的变化情况,并绘制出弹性体材料的应力松弛谱图,这将有助于进一步了解被测试材料的特性。该装置可在宽域的温度范围(从-160 ℃到+100 ℃)内绘制出相关性曲线,所得结果可用于预测在动态作用下材料的响应,从而开发新型材料。
[责任编辑:杨耀祖]
卡博特领跑炭黑行业能效榜
从天津开发区管委会获悉,近日,卡博特天津工厂荣登2013年中国炭黑行业“能效领跑者”榜首。该榜单由中国石油化工联合会发布,用于表彰在环保领域有突出贡献的炭黑生产相关企业。
“今年,是天津开发区建区30周年,也是卡博特天津工厂成立10周年。”相关负责人表示,截至目前,卡博特天津工厂的累计投资达15亿元人民币,是卡博特全球产量最高、品质最稳定、工艺技术最先进,并应用最先进环境保护设施的炭黑及深加工色母粒产品生产基地。天津工厂目前拥有四条橡胶炭黑生产线、一条高性能特种炭黑生产线、一个色母粒工厂和两个能源中心,年产能超过30万t。
作为一家生产制造企业,环境保护、健康和安全对于卡博特来讲是至关重要的。相关负责人表示,卡博特天津工厂拥有最先进的废气脱硫环保装置,在国内外的炭黑生产领域首次实现SO2浓度的可控排放,最大化地减少排放,远低于中国国家标准。同时,卡博特正在天津工厂实践区域工业共生,将城市污水净化后用于工厂环境操作,力争将水资源节能和保护做到极致。(来源:每日新报)
聚氨酯助防弹衣智能化
中国香港纺织品和服装协会的研究人员研制出一种由多条预拉伸弹性纱与聚氨酯涂层纤维共同制成的纤维电路板,可以用于制造智能防弹衣。当被机枪击中后,这种防弹衣可发出求助信息,报告中弹者的位置。
研究人员称,这种电路板可被拉伸100万次而不损坏,清洗30次而不产生变形。当被子弹击中时,纤维电路板可以作出回应。这意味着,如果在战场上,智能防弹衣可以向医疗兵发送士兵受伤的信号。
研究人员发现,子弹的力量无法损伤纤维板的电路。其中一位研究人员说:“在弹道影响测试时,纤维电路板显示出良好的韧性。所有传感器网络也表现良好,没有出现器械或电子故障,可收到可靠电子信号。
除了防弹衣,这种技术还可被用于制造仿生机器人的电子纤维皮肤等。
(来源:中国化工报)
中图分类号:TQ 330.4
文献标志码:B
文章编号:1671-8232(2014)10-0044-04
收稿日期:2013-06-23
译者简介:编江畹兰(1934 — ),女,湖北省仙桃市人。1960年毕业于前苏联莫斯科罗蒙诺索夫精细化工学院。现任华南理工大学教授,从事聚合物结构与变化的研究。
