火控性能参数静态测试系统
2014-03-27王春艳
孙 昊,王春艳
(长春理工大学 光电工程学院,吉林 长春 130022)
引言
武器火炮控制系统简称武器火控系统,可以通过自动或半自动的方式实施武器系统的瞄准与发射。现代火控系统应用广泛,平台较多,例如火箭和导弹、舰载武器(鱼雷、导弹、舰炮及深水炸弹)、机载武器(航炮、导弹及炸弹)、坦克炮等武器作战装备。火控系统的配备,可使非制导武器适应于多种恶劣的战场环境,同时提高发射的快速性及瞄准的准确性,最大程度地发挥武器的毁伤能力;制导武器配备火控系统,高精度地发射瞄准不仅能改善制导的工作条件,有效降低制导系统的失误率,还可增强导弹对机动作战目标的反应能力。
火控系统构成:目标跟踪器、射击控制仪、火力控制计算机、系统控制调节台、必要外围设备及接口设备。作用:获取战场态势信息和目标数据及技术设计参数,提高设计辅助决策;控制火力武器设计,评价估量射击效果。确保火控系统能够完成使命的至关重要因素即精度指标,精度的高低直接反应在武器的命中概率上。武器装备火力、火控系统在真正投入使用之前,需要经过严格的靶场试验,对其各项性能参数进行考核与测试。
在前人探索的基础上,对国内外相关测试手段进行研究,运用一种新的静态测试方法,设计出一套完整的火控性能参数测试系统。可实现火炮炮身松动量、过渡过程品质、刚性、调炮速度、最大角速度、最大角加速度、炮身松动量7项指标的检测。
1 系统原理
本测试系统主要由静态参数光学测量头、车载中心控制装置、图像处理装置、测试靶等部分组成。
火控系统进行静态参数测试时,在火炮身管上施加规定的力,使火炮身管(连同光学测量头)产生圆周运动,再通过光学测量头采集坐标靶(靶面上贴有方格纸)的相对运动的图像,运用图像采集卡将采集到的图像存储为数字信息,经计算机处理,提取相关信息,推算火炮身管的运动轨迹,计算出相应参数。同理可测出炮身松动量、刚性、火炮最大调炮速度等7项指标。
2 静态参数光学测量头设计
静态参数光学测量头由光学系统、CCD(charge-coupled device)摄像头、机械壳体组成,并通过弹性胀套夹具(可适用于多种口径的炮管)将光学测量头安装于炮口内部,实现与炮管的全方位同步运动。
静态参数光学测量头的图像信息采集、传输、处理、记录分别由车载中心控制装置、图像信息传输装置、图像信息处理系统来完成。
2.1 CCD相机选择
电荷耦合元件CCD,是一种拥有许多电容的集成电路,能感应光线并将图像信息转变成数字信号。关于CCD相机选择,重点考虑相机的分辨率、灵敏度、像素尺寸、外形尺寸等指标[1],同时考虑温度条件、帧频、动态范围等因素,选用SONY公司XC-ST50CE模拟相机[2],参数见表1。

表1 SONY公司XC-ST50CE相机主要参数Table 1 Main parameters of SONY XC-ST50CE camera
2.2光学系统设计
1) 初始结构参数确定
技术指标要求:
作用距离1.5 m;
口径≥10 mm;
对角线视场≥4°;
适用于不同口径火炮身管;

2) 光学系统设计
调制传递函数MTF(modulation transfer function)是评价光电成像系统总体成像质量的重要指标。根据已知的视场角、焦距、成像的光谱范围来确定光学系统的初始解。利用自己研制的光学自动求初始结构软件,选择满足要求的光学玻璃组合,并确定各光学镜片的半径。通过ZEMAX光学设计软件进行优化,用小像差互补,优化最后结果,并套样板得到表2的光学参数,其光学系统结构如图1所示,其光学系统的MTF曲线如图2所示。
表2光学系统结构参数
Table2Opticalsystemstructureparameters


图1 光学系统结构图Fig.1 Optical system structure
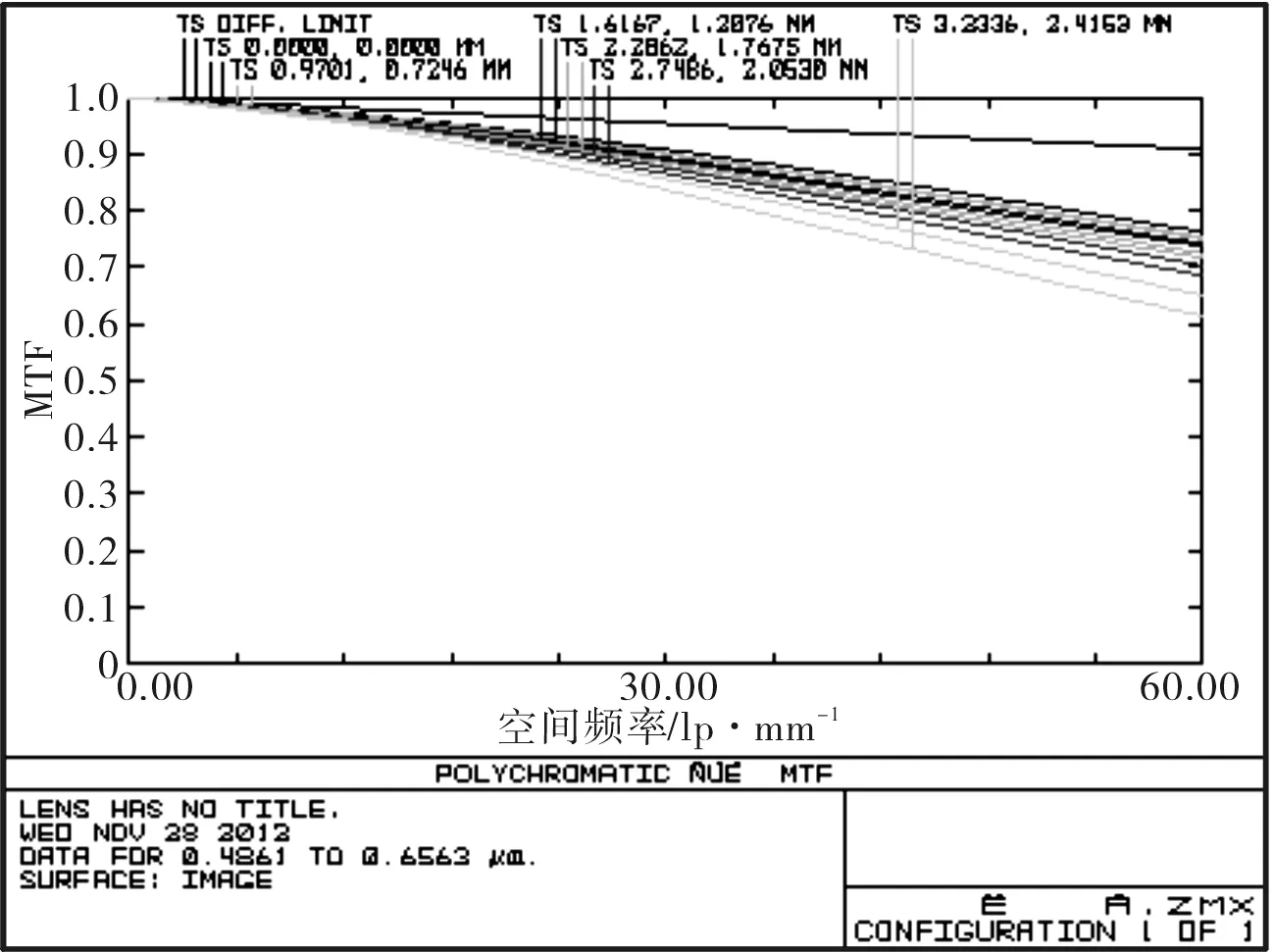
图2 光学系统MTF曲线图Fig.2 Optical system MTF
3)光学系统像质评价及适应性分析
光学系统采用多片组合近似对称结构,便于校正短焦距、大视场光学系统的慧差、象散、畸变、倍率色差等轴外像差,实现全视场、宽光谱条件下的高清晰度成像。
由MTF曲线可知,各视场的传递函数曲线几乎与衍射极限重合,且在60(线对/mm)处的MTF值达到了0.6以上。
考虑温度变化对光学系统的影响,模拟分析了焦距、后截距随温度的变化情况,由表3和图3可以看出,在-30℃~+50℃与正常温度20℃相比,光学传递函数变化不大,故该光机结构在高低温下工作是稳定可靠的[3]。
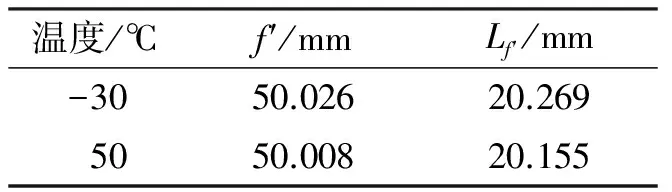
表3 焦距、后截距随温度的变化情况Table 3 Focus, back focal length changes with temperature

图3 光学系统传递函数随温度的变化图Fig.3 MTF of optical system in different temperatures
2.3 机械结构设计
采用弹性胀套新型的联接方式,它是利用锥面压紧后所产生的摩擦力来传递扭矩和轴向力。与其他方式相比,弹性胀套具有制造安装简单方便、定心精度高、承载能力高、拆卸方便等优点。图4为静态光学测量头的机械结构图。

图4 系统二维装配图Fig.4 2D drawing of system assembly
3 测试方法
因为火炮的调炮速度直接决定着武器系统发现、识别和跟踪目标的能力,调炮速度越高就能更快、更准确地发现并在第一时间有效打击敌方目标。故火炮最大调炮速度测试[4]的具体方法为:
将车辆停放在平坦开阔场地上,外接地面电源,保证系统动态供电,保证车内车外无影响火炮转动的干涉物;
在距离火炮炮口1.5 m处放置测试靶,在测试靶板上做特殊标记(网格及数字标记);
在炮口处安装静态参数光学测量头,同时加电,做好记录准备。
3.1 测试方法
1) 在靶板上做十字标记,将测试靶放置于炮口1.5 m处,调整炮轴指向,使靶板十字位于CCD的中心位置;
2) 扳动操纵台,使火炮以最大速度水平向测量范围为θx,垂直向测试范围为θy进行转动,同时开始记录图像,停止扳动时停止记录,每个方向上各测3次。
3) 水平向左、右各测3次,垂直向上、向下各测3次,各方向取平均值作为火炮最大调炮速度实测值。
3.2 数据处理及评定
图像处理[5-6]:由于录取的每幅图像都融合了GPS时间信息,在处理过程中可以通过识别图像时统条码获取每帧图像的精确时间。首帧图像和尾帧图像的时间差即为火炮最大调炮时间t,同时可以识别调炮的起点和终点视场十字中心在图像中的位置(水平H1、H2,垂直V1、V2),可以精确地计算出最大调炮速度[7]。
1) 火炮水平方向最大调炮速度计算
ω1max=θx/tx
(1)
式中:ω1max为水平向最大调炮速度,单位:(°)/s;θx为炮塔水平向转过的角度360°;tx为水平向通过时间。
2) 火炮垂直方向最大调炮速度计算
ω2max=θy/ty
(2)
式中:ω2max为垂直向最大调炮速度,单位:(°)/s;θy为炮塔垂直向转过的角度360°;ty为垂直向通过时间。可据其计算出火炮最大调炮速度的误差值[8]及最大调炮速度引起的炮轴指向误差。
4 精度分析
光学系统艾利斑直径小于CCD像素尺寸:
50=5.5 μm
(3)
CCD隔行扫描的判读精度为
(4)
(5)
将测试靶安放在1.5 m处,每个像素对应靶板上的距离为
水平向距离:
(6)
垂直向距离:
(7)
判读精度可达到0.3 mm。
5 软件流程及界面
根据对于计算机系统的硬件了解和对计算机软件计算模型及其算法的分析,设计了包括系统设置与管理、试验测试操作、试验过程控制、图像信息处理、数据分析处理等功能模块的系统软件,软件平台框图如图5所示。操作系统采用图形用户界面,其视觉效果良好,操作系统主界面如图6所示。

图5 软件平台框图Fig.5 Software platform figure

图6 操作系统主界面Fig.6 Main interface of operating system
6 结论
在深入研究火炮静态参数测试理论的基础上,对火炮静态参数测试系统进行总体设计研究。根据实际设计要求选取了符合系统使用要求的CCD相机,设计出满足成像要求的光学系统。该检测装置除了作为火控静态性能测试设备外,稍作改进还可用在海军舰炮、陆军高炮、空间激光通信等动基座上满足动态工作需求的仪器设备中。
[1] 王春艳,李帅,袁济林,等.重复瞄准精度测量系统设计[J].长春理工大学学报,2010,33(2):28-31.
WANG Chun-yan,LI Shuai,YUAN Ji-lin,et al.System design about repeat aimed precision measurement [J]. Journal of Changchun University of Science and Technology,2010,33(2):28-31. (in Chinese with an English abstract)
[2] 王春艳,王美蠲,周庆才,等.远距离动目标实时测试系统设计[J].应用光学,2011,32(4):709-713.
WANG Chun-yan,WANG Mei-juan,ZHOU Qing-cai,et al. Real-time test system for long range moving targets [J]. Journal of Applied Optics,2011,32(4):709-713. (in Chinese with an English abstract)
[3] 韩洋,常天庆,丁士拥.半自主式火控系统建模与动态特性分析[J].计算机工程与设计, 2011,32(12):4155-4168.
HAN Yang,CHANG Tian-qing,DING Shi-yong. Modeling and dynamic characteristic analysis of semiautonomous fire control system [J]. Computer Engineering and Design,2011,32(12):4155-4168. (in Chinese with an English abstract)
[4] 魏云升,郭治,王校会.军用光学仪器[M].北京:北京理工大学出版社,2003.
WEI Yun-sheng, GUO Zhi,WANG Xiao-hui. Military optical instrument[M]. Beijing:Beijing Institute of Technlogy Press, 2003. (in Chinese)
[5] 姚雾云,徐德友.某型自行火炮火控系统检测系统[J].兵工自动化,2010,29(12):69-72.
YAO Wu-yun,XU De-you. Detection instrument for firing control system of certain type self parallel gun [J]. Ordnance Industry Automation,2010,29(12):69-72. (in Chinese with an English abstract)
[6] 段锦,王小曼,王志坚,等.炮瞄系统动态参数测量[J].火力与指挥控制,2011,36(11):200-202.
DUAN Jin,WANG Xiao-man,WANG Zhi-jian,et al. Study on measurement methods of mynamic parameters of gun sighting system [J]. Fire Control & Command Control,2011,36(11):200-202. (in Chinese with an English abstract)
[7] 王春艳,姜会林,王陆,等.用于火控动态性能测试的多光轴光学系统[J].兵工学报,2011,32(6):746-751.
WANG Chun-yan,JIANG Hui-lin,WANG Lu,et al. The multi-axial optical system study for fire control dynamic performance testing [J]. Acta Armamentarii,2011,32(6):746-751. (in Chinese with an English abstract)
[8] 赫赤,赵克定,冯三任,等.炮控系统静态参数测试及其关键技术研究[J].南京理工大学学报,2004,28(1):14-18.
HE Chi,ZHAO Ke-ding,FENG San-ren,et al. The system for the static parameters of gun control system and its key techniques [J]. Journal of Nanjing Universtity of Science and Technology,2004,28(1):14-18. (in Chinese with an English abstract)
