轮式移动机器人自主充电电源自动对接装置研究与设计
2014-03-26刘卓明郑倩倩马承志郭素梅王少荣
刘卓明,柳 斐,郑倩倩,徐 平,马承志,杨 玺,郭素梅,王少荣
(1.广东电网公司江门供电局,广东江门 529000;2.华中科技大学强电磁工程与新技术国家重点实验室,湖北武汉 430074)
0 引言
轮式移动机器人的动力来源主要采用高品质机载蓄电池组,因此需要在电能不足的情况下自主进行充电。目前应用比较广泛的充电方式如普通直插式充电[1]、利用光伏发电原理充电[2]、利用激光导航对接充电[3]、利用磁轨道导航对接充电[4]、采用传感器辅助定位法充电[5]、采用车载充电连接器与地面电源连接充电[6]、使用红外传感器和超声波传感器相结合充电[7]以及非接触感应即利用电磁感应原理[8]来给蓄电池充电等。本文结合变电站定轨机器人巡视系统的实际应用需要,以及轮式机器人行程和载重等需要,提出了一种新型实用的电源自动对接方法。所提方法类比人获取电源插头的行为,机器人装载的电源对接控制器首先控制机器人的机械手水平向后伸出,接着通过无线电信号遥控馈电装置带动电源线及特制电源插座进行靠近机械手方向的水平横向移动,在电源线和机械手接触后,进一步控制电源线横向移动以实现特制电源插座在机械手上的高度调节。这种方法实现了特制电源插座在三维空间坐标的准确定位。从而,只要轮式机器人停泊在指定区域,尽管存在停泊偏差以及轮胎气压变化引起的机械手离地面高度偏差,机械手均能实现电极抓取、插入和拔出的准确控制,完成机器人自主充电电源自动对接——分离的完整过程。本文对上述对接方法的实现进行了详细叙述。
本装置充分考虑到轮式机器人需配置较大容量的蓄电池和充电电流较大的特点,又融合了轮式机器人停泊位置可能具有较大误差的情况,要求电源对接装置的电极接触面大且具有较大的压力,从而设计出能够自动伸缩的机械手来获取电源,进行充电。本文提出的技术方案已经申请国家发明专利。
1 电源自动对接装置
1.1 装置组成
轮式机器人自主充电的电源自动对接装置,如图1所示,包括悬挂的馈电装置和车载的受电装置。馈电装置包括电动机a、丝杠、滑块、滑轨、左限位开关、右限位开关、电线悬挂杆、电线悬挂环、电源线、特制电源插座、悬挂弹簧、悬挂钢丝和无线控制器。受电装置包括电动机b、丝杠、滑块、滑轨、支撑座、梳状机械手、电极插槽、前限位开关、后限位开关和对接控制器。
1.2 装置原理
轮式机器人自主充电的电源自动对接装置采用类比人获取电源插头和插接电源的行为,当机器人回到舱位准备充电时,装设在机器人上的电源对接控制器首先控制机器人的机械手水平向后伸出,接着通过无线电信号遥控装设在机器人舱位中的馈电装置带动电源线及特制电源插座进行靠近机械手方向的水平横向移动,在电源线和机械手接触后,进一步控制电源线横向移动以实现特制电源插座在机械手上的高度调节。
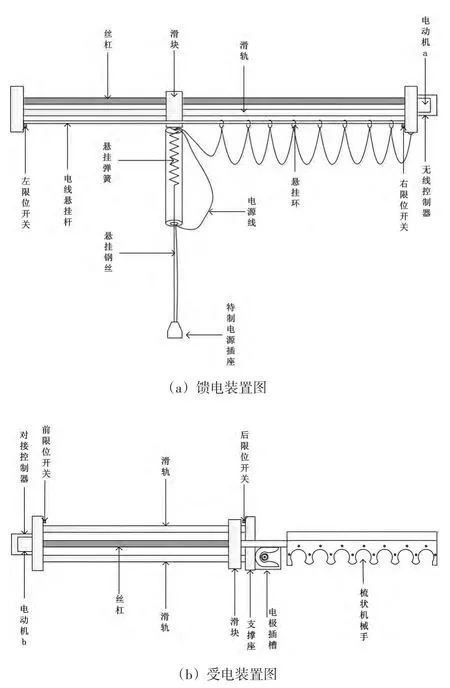
图1 电源自动对接装置
假设机械手向后水平伸出的方向为Y轴正方向,电源线靠近机械手横向移动的方向为X轴负方向,电源线和机械手的相交点为坐标原点O,Z轴垂直XOY平面且通过O点,向上为Z轴正方向。机械手抓住特制电源插座情况如图2所示。
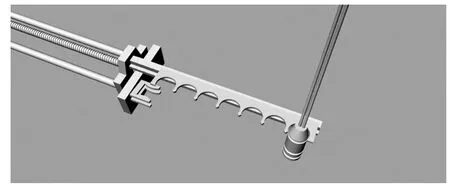
图2 机械手抓住特制电源插座情况示意图
从图2可以看出,满足下面3个条件可以实现特制电源插座的准确抓取:(1)当机械手向后伸出,其顶端的Y坐标大于0且有足够裕度;(2)电源线自X坐标大于0且有足够裕度的位置向X轴反方向移动,并能够在X负半轴继续移动;(3)特制电源插座初始位置的Z坐标应小于0且有足够裕度。当满足上述3个条件时,这种方法可实现特制电源插座在空间三维坐标中的准确定位。从而,只要轮式机器人停泊在指定区域,尽管存在停泊偏差以及轮胎气压变化引起的机械手离地面高度偏差,机械手均能实现特制电源插座抓取和插拔的准确控制。
1.3 工作过程
本装置的工作过程如下:按上述原理,当轮式机器人电力不足需要补充电能时,轮式机器人自动停泊到指定区域,首先对接控制器控制梳状机械手向后伸出,直到滑块触碰到后限位开关,电机b停止转动;随后对接控制器发出无线电信号,启动馈电装置动作,电动机a驱动丝杠转动,带动滑块和下方的电源线和特制电源插座向左移动,电源线与梳状机械手接触后,由于机械手的阻挡,电源线的继续左移导致特制电源插座上升,直到特制电源插座触碰到梳状机械手任意圆弧底面的三个触觉传感器,对接控制器发出无线电信号,控制电动机a停止转动,随之滑块和下方的电源线停止向左移动;接着,对接控制器启动受电装置的电动机b,驱动丝杠反向转动,带动滑块返回,梳状机械手及特制电源插座前移,将特制电源插座引至电极插槽,直到碰到槽位限位开关,电机b停止转动;进一步,对接控制器启动电动推杆将插头推向特制电源插座,直到触碰插入限位开关,电动推杆停止;至此,电源电路连通,对接控制器再发出无线电信号要求合上电源开关,馈电装置中的无线电控制器接收到关合信号后,控制电源开关合上,机器人即处于充电状态。
充电完成后,对接控制器首先发出无线电信号要求断开电源开关,且待馈电装置断开电源后,再进行与上述相反的控制,即完成将电源插头拔出、将特制电源插座推出电极槽位且机械手向后伸出、发出无线电信号要求馈电装置带动电源线及特制插座右移、收回机械手这4个步骤。
2 关键部件
2.1 梳状机械手
梳状机械手包括机械手臂、梳状板和触觉传感器,如图3所示。梳状板上分布有多个圆弧状的梳孔。梳状板与水平面呈一定角度,梳孔之间的连接处为圆弧,以方便电源线进入。每个梳孔均布有触觉传感器,触觉传感器的工作原理是:当特制电源插座被拉入梳状板的任意梳孔时,特制电源插座与三个触觉传感器接触形成两个通路使对接控制器检测到两路电信号,以确认特制电源插座已经进入机械手的梳孔。当对接控制器感知特制电源插座已经抓取,即启动电动机b,带动梳状机械手缩回,将特制电源插座拉入电极插槽。
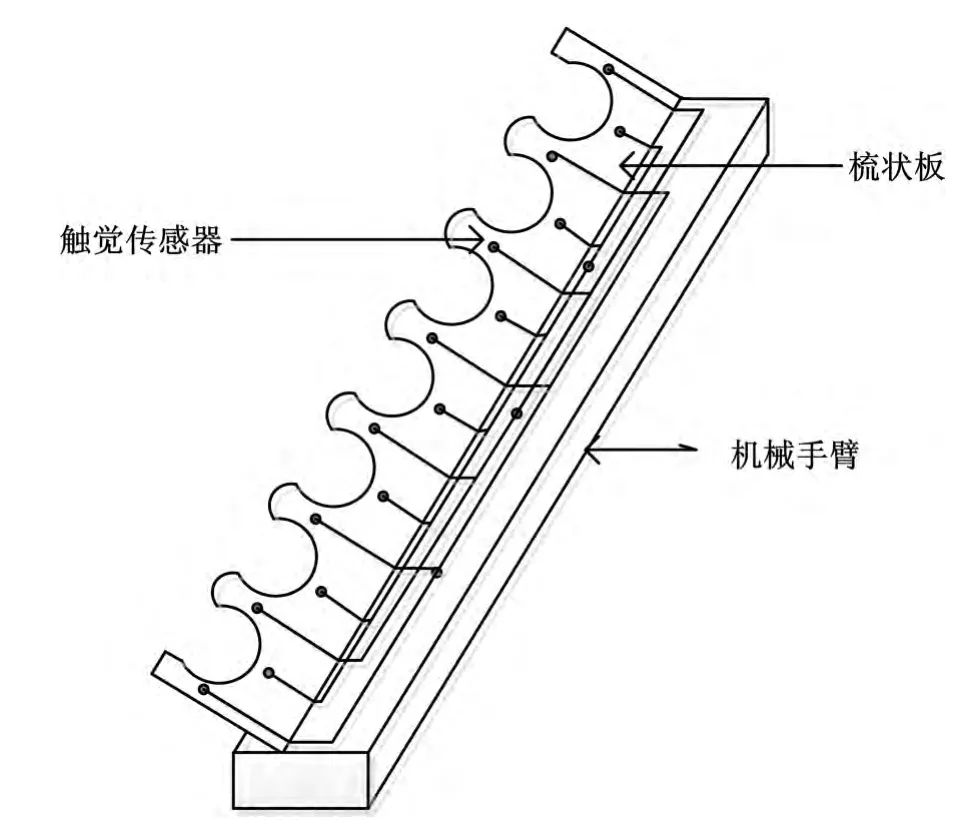
图3 梳状机械手
2.2 特制电源插座
特制电源插座如图4所示,包括铝合金圆锥外壳、绝缘支座、铜管电极、铜环电极、钢丝绳固定扣和绝缘垫片,其组装图如图4(a)所示。铝合金圆锥外壳上段为内空的圆锥体,下段为有内螺纹的圆柱体,如图4(b)所示;绝缘支座为用阻燃ABS或尼龙等绝缘材料制成的与铝合金圆锥外壳配合的带有外螺纹的圆柱体,顶端带有圆柱体凸台,中心有下段直径较大、上段直径较小的轴向通孔,该绝缘支座下端面还刻有环形槽,在环形槽上布置四个对称的轴向通孔,如图4(c)所示;铜管电极用铜棒制成,上段直径较小且顶端有螺纹成为接线柱之一、下段直径较大且中心有电极插孔,如图4(d)所示;铜环电极由下铜环、上铜环和四个铜螺钉构成,下铜环较厚、环上四个固定孔带螺纹且螺孔不贯穿,上铜环略薄且其四个固定通孔无螺纹,四个铜螺钉中的三个可用普通铜螺钉,其中一个为带接线柱的特制铜螺钉,如图4(e)所示;钢丝绳固定扣用于固定钢丝绳,为市面上可购置件;绝缘垫片为带穿线孔的绝缘材料圆片,用于隔离钢丝绳固定扣和铜接线柱。

图4 特制电源插座装置图
2.3 电极插槽
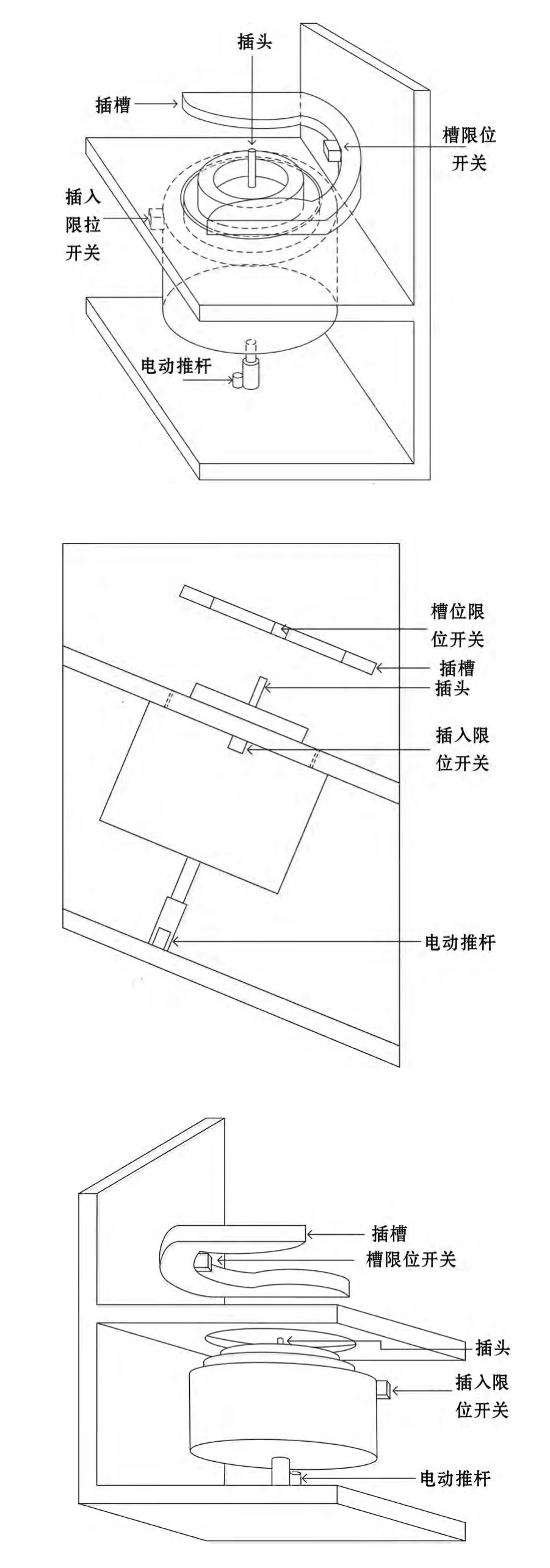
图5 电极插槽三视图
电极插槽包括插槽、插头、电动推杆、槽位限位开关和插入限位开关,如图5所示。插槽是U型不锈钢凹槽,槽口为喇叭口,方便特制电源插座入槽。插头中间是针形电极,外围为环形电极,两电极与特制电源插座的两个电极相匹配,该插头有电动推杆驱动插入或拔出;槽位限位开关用于感应特制电源插座入槽状态;插入限位开关用于感应插头插入状态。
2.4 对接控制器
对接控制器以微处理器作为控制核心,能够检测机械手触觉感应信号、机械手前后限位信号、特制电源插座入槽信号和插头插入信号,具有无线电通信接口,并有控制机械手伸缩和电动推杆运动的控制输出接口,其电气原理框图如图6所示。

图6 对接控制器电气原理图框图
2.5 无线控制器
馈电装置的无线控制器以微处理器作为控制核心,能够检测馈电装置滑块的左右限位信号,具有无线电通信接口,并有控制滑块左右移动的控制输出接口和控制馈电电源开关分合闸的输出接口,其电气原理框图如图7所示。
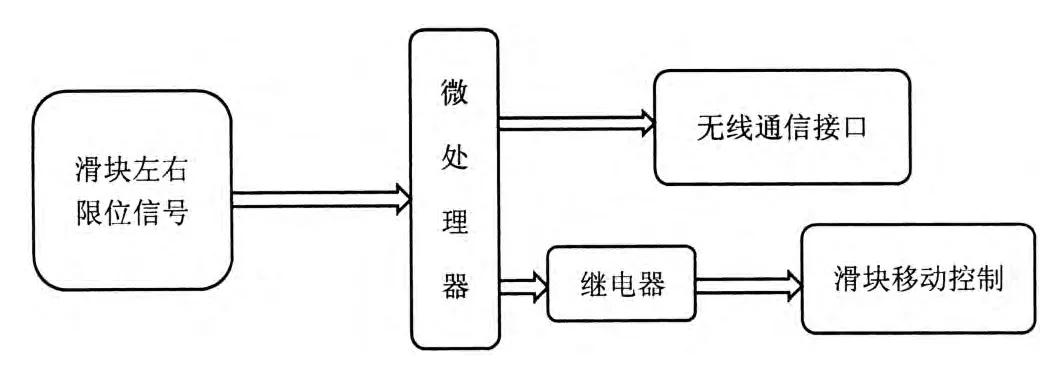
图7 无线控制器电气原理图框图
3 结束语
轮式移动机器人自主充电电源自动对接装置,是实现移动机器人能够及时补充能源,从而能够完成继续作业任务不可缺少的关键装置。本文提出和实现的电源自动对接装置采用了类比人获取电源插座和插入电源的行为,能够在多种因素的影响下实现特制电源插座的空间三维坐标准确定位,并且设计的插座和插头能够满足大容量蓄电池的充电需要。随着机器人技术的发展,充电电源自动对接技术也将不断发展,本文研究的机器人充电电源自动对接装置也将得到进一步改进,以更好地适应各种实际应用场合。
[1]陈晓松.群体机器人自充电系统的设计[D].上海:上海交通大学,2013.
[2]石建军.基于光伏转换的移动机器人自动充电系统设计[D].长沙:湖南大学,2010.
[3]刘瑶.20_500kV无人值班变电站履带式巡视机器人[D].保定:华北电力大学,2012.
[4]杨墨.变电站巡检机器人电源系统研究[J].机电信息,2013(6):127-128.
[5]王建军,周瑾.自主移动机器人的非接触充电模式[J].上海第二工业大学学报,2012(2):112-116.
[6]刘志雄,李浙昆.室内移动机器人自动充电技术[J].机械与电子,2007(3):51-54.
[7]郑智聪.自动充电机器人[D].福州:福建农林大学,2007.
[8] Aiguo Patrick HU,Chao Liu.A Novel Contactless Bat⁃tery Charging System for Soccer Playing Robot[A],15thInternational conference on Mechatronics and Machine Vi⁃sion in Practice (M2VIP08)[C], 2-4 Dec 2008,Auckland,New-Zealand.