救援机器人设计*
2014-03-26张瑞君曹欢玲周剑飞徐导勇
张瑞君,曹欢玲,陆 涛,周剑飞,徐导勇,魏 尧
(浙江农林大学工程学院,浙江临安 311300)
在自然界中,存在许多人类难以到达的地方和可能危及人类生命的特殊场合,如工地、地震救援等。灾害搜救工作的复杂性和危险性往往给救援工作带来极大的困难,救援机器人将成为灾害辅助救援的有效工具[1-2]。本文设计了一款能在废墟狭小空间中破障穿行的小型救援机器人。将装有多级减速器的直流电机作为履带装置的动力,采用四驱方式。综合考虑底盘离地面高度和机器人整体高度,初步设计驱动轮直径为80 mm,支持轮直径为36 mm,如图1所示。
1 行走机构设计
搜救机器人面对的工作环境是废墟,由大量的碎砖块、被损毁的家居用品等组成。废墟中各种小障碍极多且凹凸不平,为此,行走机构选取类似于同步带的行走履带。履带内齿面为同步带标准齿形,外齿面(着地面)采用矩形截面齿形,以提高其攀越障碍的能力。工作时,带齿与带轮的齿槽相啮合,是一种啮合运动,因而具有带传动的优点,如耐屈挠性好、伸长率小、强度高等。驱动轮的齿形为标准同步带轮齿形,带挡边以限制履带横向移动。从攀越障碍、防止打滑、动力以及履带式独特的转弯方式角度分析,
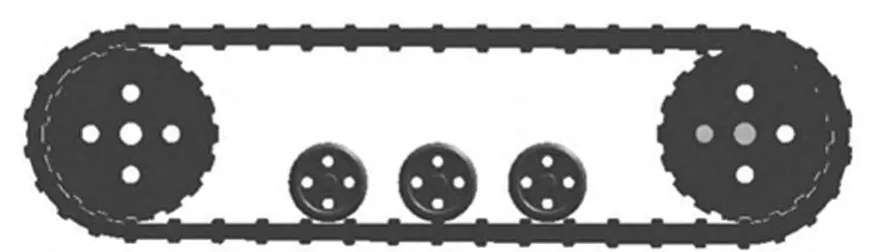
图1 行走履带
2 机械手设计
对于采用履带式行走方式的救援机器人而言,行走机构用来完成空间内的整体移动。为了增强救援机器人对废墟内部复杂状况的适应性,引入能够完成三维空间操作任务且能够精确操控的多自由度机械手[3-4]。综合实际可行性及角度分析,借鉴实际制作经验设计了一种四自由度机械臂,如图2所示。优点为:非工作状态时机构所占空间和整体体积较小、重量轻、动作较精确及操作灵活。机械手要完成破障任务,需要具备一定的承载能力,例如利用破障电锯将横向阻挡在通道内的木棍锯断后,由机械手将其从前进道路上抓离。
设计一款平行四边形连杆式平动型抓取机构,如图3所示。连架杆A、连架杆C、连杆E、机架以及与之对应的连架杆B、连架杆D、连杆F、机架分别组成一个双曲柄机构。由于连架杆A与连架杆C长度相等,连架杆B与连架杆D长度相等,故成为平行四边形机构。连架杆A作为动力源,连架杆A与B通过齿轮连接传递驱动力,当A受到驱动力按箭头运动方向转动时,B同时被带动,平行四边形机构中的连杆E和F向夹持机构的中心轴同步平移,完成夹取动作。

图2 机械臂机构运动简图

图3 抓取机构运动简图
3 破障装置和铲车结构设计
破障工具根据动力源不同分为三类:电动式、液压式和气动式。考虑到救援机器人的内部空间小和承载能力有限,为此需要提供动力源的液压式和气动式不在考虑范围内。常见电动破障工具根据原理不同分为:圆盘锯、电链锯、曲线锯、电钻等[5],通过改造常见电动工具,设计出符合基本要求的小型化破障装置——往复式电锯,如图4。

图4 往复式电锯破障装置结构图

图5 机械手结构图

图6 铲斗抬升机构运动简图

图7 铲推装置结构图
在狭小的废墟通道内,对于体积较大的障碍物,无法使用破障设备破除,例如一块斜靠在通道壁上的石板、一堆碎石块堵塞前进通道。面对这类状况,机械手无法抓取体积过大的障碍物,破障电锯也无法发挥作用,这时最好的解决办法是将障碍物推开,或者直接将障碍物搬离。借鉴铲雪车的前铲结构,设计了具备铲车搬运功能、铲推功能、保护功能及开辟通道功能的铲推设备。铲斗被设计成150°夹角,能够将救援机器人前进的驱动力分解,产生向左、右两侧方向的分力,在前进过程中将障碍物推向两侧[6]。铲推装置结构上采用了连杆机构的设计方案,如图6,使用两个精确定位的小型伺服电机驱动,提供足够的抬升动力同时确保搬运障碍物的过程稳定进行。为避免前置铲斗对履带行走机构翻越障碍性能产生影响,铲斗最大抬升高度定为40 mm,如图7。
4 总结

图8 救援机器人结构图
救援机器人的实际工作环境非常复杂,需要考虑的因素很多,因此,其功能设计很难面面俱到。经过对救援机器人实际废墟运行环境具体分析,并对搜救任务执行过程中可能遇到的多种需求进行假设研究,明确了救援机器人应达到的功能配备和性能指标[7-8],实现了越野功能、破障功能、多自由度机械手功能等。救援机器人结构图如图8所示。
[1]李斌.蛇形机器人的研究及在灾难救援中的应用[J].机器人技术与应用,2003(3):22-26.
[2]司戈.机器人在“9.11”救援行动中的应用[J].消防技术与产品信息,2003(7):44-47.
[3]王野,王田苗,裴葆青,等.危险作业机器人关键技术综述[J].机器人技术与应用,2005(6):23-31.
[4]钱善华,葛世荣,王永胜,等.救灾机器人的研究现状与煤矿救灾的应用[J].机器人,2006,28(3):350-354.
[5]刘金国,王越超,李斌,等.灾难救援机器人研究现状、关键性能及展望[J].机械工程学报,2006,42(12):1-12.
[6]董晓坡,王绪本.救援机器人的发展及其在灾难救援中的应用[J].防灾减灾工程学报,2007,27(1):112-117.
[7]唐鸿儒,宋爱国.危险环境侦测机器人的研究进展[J].机器人技术与应用,2007,23(4):29-35.
[8]孟庆鑫,王晓东.机器人技术基础[M].哈尔滨:哈尔滨工业大学出版社,2006.