地铁车辆滑行控制方案对比分析
2014-03-24王艳伍陈爱丽
王艳伍 陈爱丽
(西安市地下铁道有限责任公司,710018,西安∥第一作者,工程师)
地铁车辆滑行控制方案对比分析
王艳伍 陈爱丽
(西安市地下铁道有限责任公司,710018,西安∥第一作者,工程师)
地铁车辆滑行控制是一种使滑行列车再粘着的控制方式。地铁列车的制动一般采用电制动和空气制动两种方式,而电制动与空气制动有各自独立的车辆滑行控制方案。结合西安地铁1号线首列车型式试验,分析对比了两种滑行控制方案的特点,至今未发现哪个方案的列车有发生擦轮等问题。
地铁车辆;电制动;空气制动;滑行控制
First-author'saddressXi'an Metro Co.,Ltd.,710018,Xi'an,China
0 概述
地铁车辆制动系统主要有动力制动(电制动)和空气制动(机械制动)两种制动方式。此两种制动方式都是利用轮轨间的粘着力的作用实现的。列车制动原则是:优先使用电制动,不足部分由空气制动来补充;但紧急制动为纯空气制动。
按照轮轨粘着机理,轮轨之间的粘着是轨道交通车辆形成制动力和牵引力的基础。改善粘着条件,提高粘着利用率,可以充分发挥列车的牵引、制动性能,同时还能有效防止滑行和空转,减少列车和线路设备的损伤。
在地铁列车制动过程中,当制动力超过粘着力时车轮与钢轨之间会发生滑行。当滑行发生后,为了适应实际轮轨的粘着状况,应减少制动力。制动力按照减速度差值以及速度与参考速度的差值来计算,并按此差值来调整制动力。电制动与空气制动有各自独立的滑行控制,以保证最佳粘着状况的利用。
西安地铁1号线车辆为B2型车,由大连机车车辆有限责任公司集成(含克诺尔车辆设备(苏州)有限公司的空气制动系统),牵引系统由株式会社日立制作所提供。列车采用3拖3动编组方式,牵引系统采用车控方式,空气制动系统采用克诺尔EP2002架控制动方式。西安地铁1号线是日立牵引系统第一次与克诺尔EP2002空气制动系统相配合。因两者在电-空滑行控制协调方面的控制理念不同,所以需对双方的控制理念进行理论分析、试验验证和运行考核。
1 滑行检测、控制与电空滑行控制的协调方案
电制动与空气制动有各自独立的防滑控制系统。以下简要介绍西安地铁1号线电制动(日立)的滑行检测、控制方法,以及空气制动(克诺尔)的滑行检测、控制方法。
1.1 电制动的滑行控制
如图1,当滑行发生后,与之前的减速度值相比,列车速度变化率dfr/dt(fr为转子频率)突降至滑行检测标准线处(一般为-11 Hz/s),牵引系统就会检测出滑行发生,并进行纠正。其具体步骤为:
1)滑行信号发生时的扭矩检测(滑行开始扭矩);
2)滑行信号发生时扭矩缩减控制(Ⅰ阶段);
3)滑行状态下的粘着力和输出制动扭矩的平衡点(再粘着开始扭矩);
4)在dfr/dt<0时的扭矩缩减控制(Ⅱ阶段);
5)计算预定粘着力,预定粘着力=滑行开始扭矩-再粘着开始扭矩+再粘着开始扭矩;
6)回归到预定粘着力的扭矩控制;
7)制动扭矩回归到指令扭矩的扭矩控制(Ⅲ阶段)。
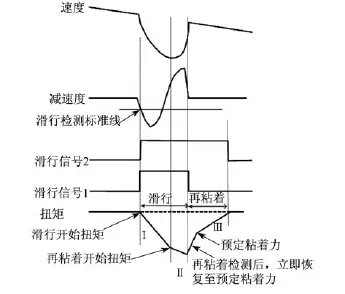
图1 牵引系统滑行控制过程
另外,牵引系统在整个滑行阶段(Ⅰ+Ⅱ)会给空气制动系统一个滑行信号1。一般地铁车辆牵引系统控制形式为车控,因此牵引系统滑行控制扭矩的缩减也是针对整车扭矩的滑行控制。
1.2 空气制动的滑行控制
克诺尔EP2002空气制动系统每根车轴上的速度传感器用来监控车轴转速,并且在制动内网中的CAN(控制器局域网)总线单元内的各个EP2002阀共享各车轴转速信息(如图2)。如果EP2002阀检测到车轮滑动,与牵引系统电气制动控制一样,此时空气制动系统的WSP(wheel slide protection,车轮滑行保护)将控制制动缸压力(制动扭矩)来校正车轮滑动,并且每根车轴可以单独进行滑行控制。
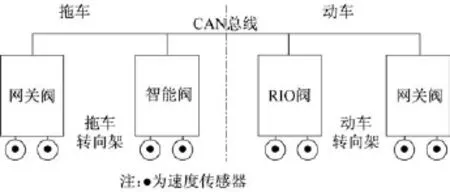
图2 制动CAN总线单元
克诺尔EP2002空气制动系统防滑判断条件为:
1)各轴之间速度差大于5%时系统进入滑行控制准备,速度差为15%~20%时进行滑行控制。
2)或当单轴减速度大于4.5 m/s2时进行滑行控制。
1.3 电空滑行控制的协调
西安地铁1号线车辆电-空混合计算由克诺尔EP2002空气制动系统承担。电-空混合计算在以1动车加1拖车为1个CAN总线单元的制动内网内进行,优先使用拖车的空气制动,不足部分使用动车的空气制动。基于电制动优先和充分利用电制动的原则,在滑行控制过程中电制动优先进行滑行控制。因此,电制动与空气制动两者之间滑行控制协调就很关键。当电制动在滑行控制(纠正)过程中,牵引控制单元(TCU)会给空气制动控制单元(EBCU)一个WSP滑行信号(如图1的滑行信号和图3的WSP信号);空气制动系统会冻结实际的电制动力,以确保空气制动系统不会增加空气制动力来补偿丢失的电制动力。具体牵引控制单元与制动控制单元的接口示意见图3。
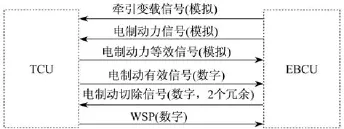
图3 TCU与EBCU接口示意
在电-空滑行控制协调方面,日立与克诺尔有各自不同的方案:
方案一:克诺尔建议在滑行和再粘着阶段均发出滑行信号(具体如图1中的滑行信号2)。此过程空气制动不补充。当电制动纠正打滑超过3 s(WSP信号持续超过3 s),或者空气制动检测到打滑并且时间超过1 s,制动系统将会设置电制动力信号为零和电制动切除信号为1,以便切除电制动并使此次制动过程中将不再有电制动力。此后由空气制动负责滑行的控制。
方案二:日立建议为了最大化利用电制动,使WSP滑行信号仅在滑行阶段发出(见图1中的滑行信号1),且从滑行到再粘着点为止,发出的滑行信号为固定值230 ms(即WSP信号有效期限设为固定值)。在再粘着阶段由空气制动进行补充,并且基于充分利用电制动的原则,建议在电制动滑行纠正的过程中一直不要切除电制动。西安地铁2号线运营列车已采用日立的建议方案。
理论上,克诺尔认为:若将WSP信号有效期限设为固定的时间值,如果电制动在小于固定时间
(230 ms)内已纠正了滑行,因滑行信号仍为高电平,则空气制动仍被冻结;若在这期间电制动性能出现下降导致电制动力不足,则空气制动无法进行补充,从而造成整车制动力不足。
1.4 电空滑行控制与信号系统的联系
ATI(自律分散系统,相当于列车管理系统)综合判断VVVF(变压-变频)和空气制动系统输出的滑行信号,将滑行控制信号输出给信号系统,以方便列车自动驾驶时司机的监视。
发给车载信号系统OBCU(On-Board Control Unit,车载控制单元)的空转/滑行(Slip/ Slide)的生成逻辑为:①当VVVF发来的滑行信号或空气制动系统发来的信号“Slide detected”保持1 s以上时,ATI向OBCU发送“空转/滑行”信号。②当VVVF发来的滑行信号为高电平或空气制动系统发来的信号“Slide detected”保持5 s以上时,ATI向OBCU发送“严重空转/严重滑行”信号。
总之,VVVF检测到轻度滑行和严重滑行时均向ATI发送滑行信号,ATI再向OBCU发送滑行信息。另外对轻度滑行,ATI不做记录。
2 试验结果对比
为了更好地对牵引和制动供货商各自的控制策略进行比选,滑行控制试验在特定的条件下,对两方案的控制效果进行量化对比。
试验条件为:在西安地铁2号线的正线上,速度V0=80 km/h,采取最大常用制动(B7级),轨面状态为洒洗涤剂水。
2.1 制动距离对比
按照克诺尔的方案一,在滑行和再粘着全过程发滑行信号,且3 s切除电制动,雷达测出制动距离为296 m。按照日立的方案二,仅在滑行阶段发出滑行信号,且不切除电制动,测出的制动距离为294 m。
2.2 纵向冲动舒适性对比
对比两种控制策略在同样试验条件下测得的列车纵向减速度-时间曲线,如图4所示。从图4中可以看出,在0~6 s内两方案的舒适性相当;在6~10 s内,方案二的舒适性稍好于方案一(此时间段,方案一电制动被切除,制动力全由空气制动提供,方案二绝大多数为电空混合制动和纯空气制动的交替);在10~20 s内,方案一的舒适性稍好于方案二(此时间段,方案一仍为电制动切除,方案二为电空混合制动与纯空气制动的交替)。
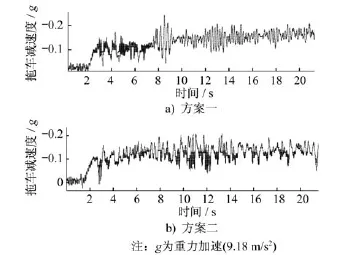
图4 列车纵向减速度-时间曲线
3 结语
从滑行纠正的控制对比来看,在确保满足冲动限制(≤0.75 m/s2)的条件下,两种方案的制动距离有差别,但差别不大;从列车纵向振动来看,克诺尔的电-空滑行控制协调方案一在乘客舒适性方面优于日立的方案二。
鉴于日立的方案二在西安地铁有业绩,克诺尔的电-空滑行控制协调方案二在国内也有不少的业绩支持,因此西安地铁1号线的现有列车一部分采用克诺尔的滑行控制软件,另一部分采用日立的滑行控制软件。经过空载试运行(累计运行15万km)验证,截至目前还未发现哪种方案的列车有发生擦轮等问题。为进一步验证和比选两方案,在试运营阶段将持续进行观察。
[1] 西安市地下铁道有限公司,大连机车车辆有限责任公司,HITACHI.电-空滑行控制配合专题讨论会会议纪要[C].西安:西安市地下铁道有限责任公司,2012.
[2] 西安市地下铁道有限责任公司,HITACHI.电气牵引系统空转/滑行控制报告[R].西安:西安市地下铁道有限责任公司,2012.
[3] 饶忠.列车牵引计算[M].北京:中国铁道出版社,2003.
[4] 殳企平.城市轨道交通车辆制动技术[M].北京:中国水利水电出版社,2009.
[5] 何宗华,汪松滋,何其光.城市轨道交通车辆运用与维修[M].中国建筑工业出版社,2007.
[6] 张昱,刘钊,程海鹰.列车制动“电-空”转换的Bang-Bang与模糊PID复合控制[J].城市轨道交通研究,2013(2):76.
Comparative Analysis of Metro Vehicle Sliding Control Schemes
Wang Yanwu,Chen Aili
Metro vehicle sliding control is a kind of sliding train re-adhesion control mode.Normally,two kinds of sliding control modes are adopted:the electric braking and the air braking,each has independent train sliding control scheme.Combined with the first train test on Xi'an metro Line 1,the characters of each control scheme are compared,and no scoop wheel has been found in either scheme.
metro vehicle;electric braking;air braking;sliding control
2013-08-06)