基于PCI总线D/A转换卡的高速转子仿真系统设计*
2014-03-22郭夏夏田社平
郭夏夏 李 伟 方 翔 田社平
(1.上海交通大学电子信息与电气工程学院,上海 200240;2.上海辛克试验机有限公司,上海 201600)
0 引言
随着科学技术的发展,旋转机械日趋大型化、高速化,而转子的不平衡是旋转机械最主要的原因之一,所以研究高速动平衡转子的平衡过程很重要。在高速平衡电测系统的开发过程中,需要经常、反复地将电测系统与高速转子系统连接,以获取真实的高速转子的不平衡振动信号,来验证电测系统的功能。而高速转子的开车和停车过程不仅费时,而且费用也较高。这就需要一种低成本的高速动平衡转子仿真系统,来模拟实际的高速转子的启停过程。
本文通过对实际高速转子动平衡过程和转子动力学的研究,用软件编程方法,通过PCI8324AF数据采集卡将数字信号转换为模拟信号,并将模拟信号输出,模拟高速转子的启停过程。
1 高速转子的不平衡响应
1.1 平衡转速与时间关系

图1 转子转速变化图
高速转子在从开车到停车过程中,包括升速、稳速和降速三个阶段。转子转速随时间变化的规律可以用图1所示的曲线表示。图1中:横坐标t表示时间;纵坐标n表示转子转速;t1为转子升速阶段;t2为稳速阶段;t3为转子降速阶段;nmax为稳定阶段对应的最大转速。
在实际应用中,转速变化过程并不是如图1所示的连续变化,而是间歇性地上升或下降,本文的仿真系统以旋转频率0.1Hz的间隔递增或递减,每频段包含一定数量的周期信号。
1.2 轴承振动与平衡转速关系
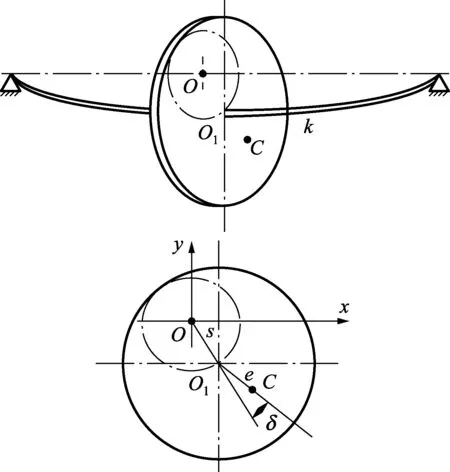
图2 挠性转子旋转简图
工程上的转子是一个复杂的弹性系统,使得转子的平衡分为刚性转子平衡和挠性转子平衡[2]。而高速转子的工作转速大多接近或超过其临界转速,从而使转子呈现出挠性转子的特性。实际转子的结构形式多种多样,为方便研究,这里将实际转子简化为一安装在刚性支承上的挠性转子,如图2所示。图2中,轴的正中有一个质量为M的圆盘。把圆盘本身看作是刚体,并假设在轴弯曲时圆盘将不产生偏转。盘上有不平衡量,圆盘质心C离开其几何中心O1,偏移量为e。轴的弯曲刚度系数为k,为方便分析,不考虑轴的质量[3]。当轴以角速度ω旋转时,圆盘产生的离心力F为:
F=Meω2
(1)
在离心力的作用下,轴在圆盘几何中心O1处产生变形s,也称为转轴的动挠度。设δ为轴的变形方向与OO1方向之间的夹角,c为阻尼,根据力平衡原理可得:
(2)
式(2)左边三项分别为转轴的惯性力、阻尼力和弹性恢复力。

(3)
从式(3)可以看出,当转子的旋转频率与转轴的一阶弯曲固有频率ω0相等时,转轴的动挠度s达到最大值,此时离心力引起转子第一阶主振型的共振。对于实际的转子,其在旋转过程存在无穷多阶的主振型和共振频率。本文的仿真系统仅模拟具有一阶共振频率转子的旋转振动,它对高速平衡电测系统的开发和研究而言,是完全满足要求的。
2 D/A转换设计
本系统采用PCI8324AF型转换卡,它是一种基于PCI总线的高性能D/A转换卡,可以直接插在计算机内的任一PCI插槽中。板上4路模拟输出通道的D/A转换器的分辨力为16位,最高采样速率高达100kHz,且D/A输出触发方式可采用软件启动或外部定时触发或内部定时触发。该卡自带8KB FIFO存储器,可通过软件设置输出方式为单通道或多通道。输出信号范围可设置为单极性(0~2.5V、0~5V、0~10V)或双极性(±2.5V、±5V、±10V)。
在开始进行D/A转换之前,首先需要设置D/A转换参数(板卡号、通道方式、通道号、启动方式、输出频率等),然后初始化设备,待设备成功初始化后(返回成功的参数),即可以进行D/A转换,若初始化不成功,则需要检查设备。D/A卡数据转换流程如图3所示。
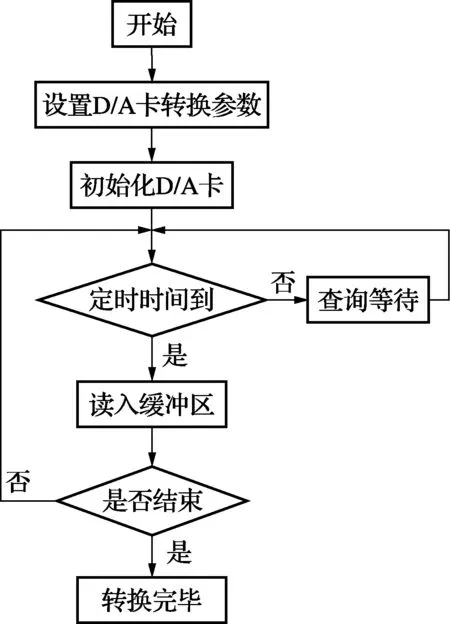
图3 D/A卡数据转换流程图
3 程序实现与应用
高速转子仿真系统的软件程序是在Microsoft Visual C++ 6.0集成环境[4]下开发的,该集成环境包含有微软基础类库MFC(Microsoft Foundation Classes)。MFC提供应用程序对话框开发模型,对话框是Windows应用程序中最重要的用户界面元素之一,具有良好的视觉效果,且操作方便、直观,是与用户交互的重要手段。
3.1 基准信号的产生
不平衡振动信号的测相原理如图4所示,图中不平衡相位角δ为不平衡振动信号的起始点同基准方波信号上升沿之间的夹角。因此,对转子实施动平衡的首要条件是提取一组稳定的基准信号。
应用程序中以方波作为基准信号。基准信号频率与振动信号频率相同。基准方波信号的产生方法如下:
产生一个与当前不平衡振动信号频率相同且相位为零的基准正弦信号,然后对其幅值进行判断,若幅值大于零方波信号幅值为正,若幅值小于零方波信号幅值为零。这样不平衡振动信号相位角δ就是不平衡振动信号的起始点同基准信号上升沿之间的夹角。

图4 不平衡振动信号的测相原理
3.2 程序应用
高速转子仿真系统使用之前,需要安装PCI8324AF板卡的驱动程序,该驱动程序包括数据转换动态链接库,其中封装了用于该卡的各类应用函数,如打开设备函数、关闭设备函数、设备初始化函数等。本系统中,要使用这些函数首先必须将头文件PCI8324AF.H写进源程序头部,再将头文件和PCI8324.Lib库文件分别加入到工程中。然后利用应用函数来完成数据的D/A转换。
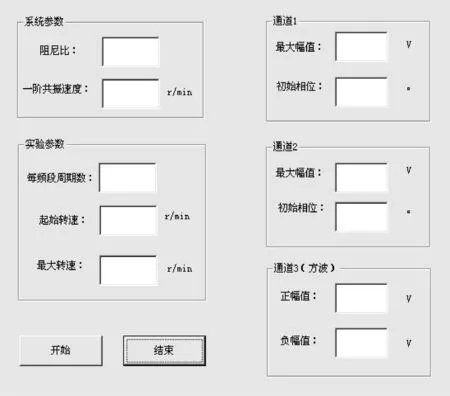
图5 高速转子仿真系统人机交互界面
高速转子仿真系统人机交互界面如图5所示。首先在用户界面输入需要的试验参数,试验参数包括系统参数(阻尼比、一阶共振速度)、实验参数(每频段周期数、起始转速、最大转速)和通道参数(最大幅值、初始相位)。系统提供三个可用通道,通道1和通道2输出转子的振动信号,通道3输出基准信号(方波信号)。将通道1(或通道2)和通道3的输出信号同时接入动平衡电测单元,点击开始按钮,就可以观测信号处理结果。图6所示为仿真系统所绘制的奈奎斯特图[5],其试验参数取值见表1。

图6 实验所得奈奎斯特图
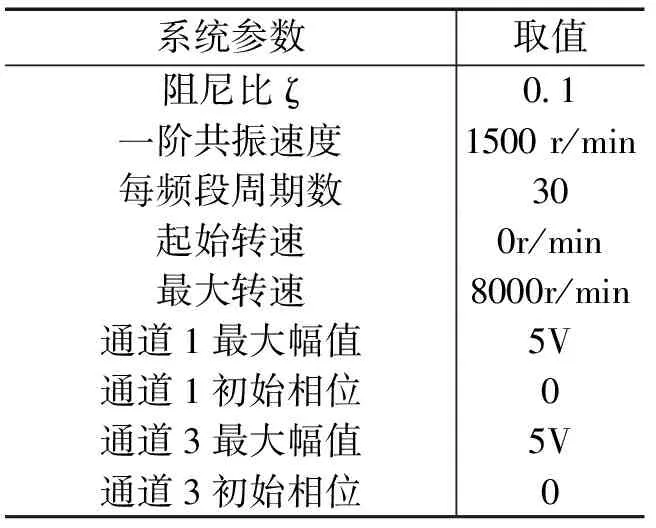
表1 实验参数取值
4 结论
本文采用PCI8324AF D/A转换卡实现高速转子不平衡振动信号的仿真,对高速平衡电测系统的研发具有极大的支持作用。所研制的高速转子仿真系统具有成本低、使用方便的特点,在实际中得到了很好的应用。
[1]闻邦椿,顾家柳,王正,等.高等转子动力学:理论、技术与应用[M].机械工业出版社,2000
[2]安胜利,杨黎明.转子现场动平衡技术[M].北京:国防工业出版社,2007
[3]唐锡宽,等.机械动力学[M].北京:高等教育出版社,1986
[4]马石安,魏文平.Visual C++程序设计与应用教程[M].北京:清华大学出版社,2007
[5]黄晓明.引入奈奎斯特准则对反馈放大电路稳定性的分析[J].湖北教育学院学报,2002,23(2):61-62
[6]Oscar De Santiago,Luis San Andres.Experimental Identification of Bearing Dynamic Force Coefficients in A Flexible Rotor Further Developments[J].Tribology Transations,2007,50:114-126
[7]王维民,高金吉,江志农,等.旋转机械无试重现场动平衡原理与应用[J].振动与冲击,2010,29(2):212-215
