国外全向凝视光电系统发展现状与趋势
2014-03-20李德栋谢晓方张龙杰肖楚琬
李德栋,谢晓方,张龙杰,肖楚琬
(海军航空工程学院兵器科学与技术系,山东烟台264001)
1 引言
在现代战场环境中,平台防御面临新的问题。美国空军一项研究表明,从二战到20世纪90年代之前,有70%的飞机在被击落前飞行员未曾感知到威胁[1]。在高性能武器快速发展的背景下出现上述现象,与现有作战平台的探测范围密切相关。以战斗机为例,在机载雷达、光电设备、平台告警系统等构成的探测系统中,机载射频雷达、光电雷达主要面向前半球空间,无线电无源全向告警不能应对红外导引武器,光电吊舱、吊塔可以监测机身下半球空域,但仅适合安装在下机身不能兼顾上方,并且机型受限。水面舰艇也面临同样的问题,受海杂波影响,在探测逼近本舰的超低空掠海导弹,或其他快速入侵物(FAIC)时,舰载雷达受到限制,并影响到需要雷达引导的其他设备。
任一方在态势感知上的漏洞,都可能打破“隐蔽接敌,突然袭击”的战术原则,并给对手可乘之机。为消除探测盲区,产生了各种辅助设备,但设备加改装又带来二次集成以及对隐身、载荷的不利影响。由此可以推断:以平台为中心,采用高度集成系统对临近区域实现全向无缝实时探测,满足近距离自防御中的信息-感知-决策要求,应是下一场战争来临之前,在防御层面亟需解决的问题。基于这种认识,美国、法国、以色列等国家在全向凝视光电探测领域开展了有针对性的研究。
2 基本原理
以传感器配置方式可将全向凝视光电探测系统分为两种类型:完全凝视型和步进凝视型。
完全凝视型是在飞机上布置若干传感器构成固定阵列,传感器合成的总视场覆盖以飞机为中心、以传感器作用距离为半径的球形范围,简称“4π”空间[2]。传感器系统与飞机平台集成,对图像综合处理、获取信息,用于全向实时告警、红外搜索和跟踪等多种用途,如图1所示。国外研究机构进一步验证了采用头盔系统的全向视景显示、远距探测飞机和导弹技术,国内有关单位和学者对此进行了跟踪研究[3-6],并出现了采用全反射镜头实现全向凝视探测的方法理论研究[7]。
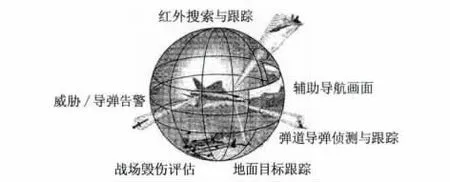
图1 DAIRS概念模型Fig.1 DAIRS conceptmodel
步进凝视型是将单个线阵或焦平面传感器安装在平台上,由伺服系统驱动传感器周期性扫描。通过控制伺服机构与图像采集处理设备协同工作获得全景图像,实现一定程度上的全向监视。
完全凝视型传感器采用高等级传感器和先进计算技术,布局灵活、监视区域可调,适用于飞行器并可移植到舰艇、车辆平台上,步进凝视型传感器则主要适用于舰艇平台。
3 典型系统
全向凝视探测可以扩大作战平台的总瞬时视场,消除特定情况下的探测盲区,为态势感知、指挥决策提供关键信息,对平台隐蔽性破坏较小。
3.1 机载类系统
3.1.1 AN/AAQ -37 系统
AN/AAQ-37由Northrop Grumman公司为F-35研制,如图2(a)所示。6套配备92°视场鱼眼镜头的制冷型中红外波段探测器,安装在F-35前上部、头锥、背脊、腹部并与机身融合,总视场覆盖“4π”空间,而且探测器镜头支持窄视场凝视[8],利用头盔显示可全方位监视机外环境,如图2(b)所示。
AN/AAQ-37可对来自任意方位的红外特征实时告警,并通过威胁库比对、判定目标属性,通过预处理得到目标精确方位,获取敌方打击意图。
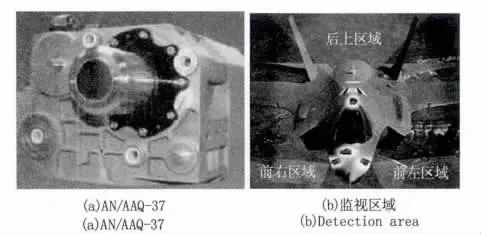
图2 AN/AAQ-37实物图及监视区域Fig.2 AN/AAQ -37 diagram and detection area
3.1.2 ADAS 系统
先进分布式孔径系统(Advanced Distributed Aperture System,ADAS)以陆军UH-60直升机作为载体,选用OpeVPX开放平台,最多可管理6路中、近红外双色探测器,满足在低空、地表区域的任务需求,如图3所示。

图3 ADAS传感器Fig.3 Sensor of ADAS

图4 DAEVX传感器Fig.4 Sensor of DAEVX
2011年4月,ADAS完成系统集成并达到“联合能力技术验证”要求,但各通道图像亮度、色彩匹配还存在差异[9]。Raytheon公司根据系统缺陷,采用CPU、GPU异构图像处理系统,完善了中、近红外图像融合和夜间飞行指示。与AN/AAQ-37不同的是,ADAS属于加装系统、传感器采用外挂方案,对武器载荷有一定影响。
3.1.3 DAEVX 系统
分布式孔径视觉增强系统(Distributed Aperture Enhanced Vision System,DAEVX)出自美国 SELEX Galileo公司,如图4所示。系统采用4组非制冷远红外相机,成组或分布安装于机体。嵌入式模块可对多通道图像几何校正、对比度动态匹配、无缝拼接融合,监视飞机水平方向360°区域,支持平显、头显、下显和位置、速度、高度的叠加显示。可与网格地形数据集成,支持低能见度甚至零能见度下的态势感知[10]。采用SigMA-B开放式体系结构,模块化程度高,支持传感器、用户数和载机平台的定制需求。
3.2 舰载类系统
3.2.1 SilentWatch 系统
SilentWatch是AN/AAQ-37系统向舰艇平台的移植产品,如图5(a)和图5(b)所示。系统对传感器布局、数据总线转换、威胁数据库、数据处理算法进行再设计,与舰艇综合作战管理系统(Integrated Combat Management System,ICMS)、综合桥接系统集成,适用于水面舰艇和海战环境[11]。

图5 SilentWatch实物图及监视区域Fig.5 SilentWatch diagram and detection area
2012年完成功能验证:系统对多组传感器图像进行无缝拼接,生成全方位、全天候、高分辨率、近实时图像,覆盖以舰艇为中心的上半球空间。能够自主探测、跟踪水面舰艇、飞机、导弹以及小型掠海飞行目标,可监视港口、为本舰提供全天导航,并通过ICMS将图像传至友军。适用于有人和无人水面平台、潜艇平台、驱逐舰、濒海战斗舰,为自防御提供关键信息。
3.2.2 Sea Spotter系统
Sea Spotter系统由以色列Rafael公司研制,如图6(a)和图6(b)所示。两套传感器组件采用锑化铟中红外凝视阵列,分置舰艇左右或前后两侧,视场覆盖舰艇上半球区域。出于对威胁因素的充分考虑,Sea Spotter系统通过图像处理算法,可分类判定地-地导弹、掠海飞行导弹、战斗机、滑翔炸弹、反辐射导弹、直升机、舰船、类似于潜望镜的小物体以及快速侵入船只。
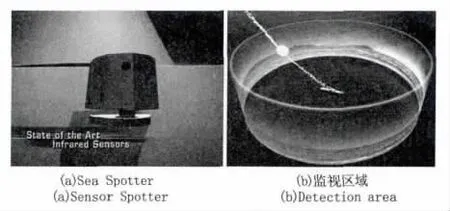
图6 Sea Spotter实物图及监视区域Fig.6 Sea Spotter diagram and detection area
系统关键特征包括:(1)采用智能算法将虚警率降低到每24 h一次,优于上一代IRST系统,做到被动探测的“See without being seen”效果[12];(2)与SilentWatch有所区别:由于受顶部攻击的概率较低,故重点放在低空和水面,尤其强调对掠海飞行导弹的探测能力。
3.3.3 EOMS -NG 系统
法国研制的EOMS-NG系统属于步进凝视系统,如图7所示。

图7 EOMS-NG传感器Fig.7 Sensor of EOMS - NG
EOMS-NG系统在传感器中集成了红外探测器、电视、激光测距器,独特之处在于除具备全景监视、昼夜红外搜索、识别与跟踪、海上取证功能外,还能作为舰炮防空、反舰火控系统,可快速完成探测和交战任务,实时性强[13]。
法国Floreal级导弹护卫舰、阿联酋6艘Baynunah级轻型护卫舰、DCNS公司Gowind近海巡逻艇“灵巧”号、澳大利亚海军新型LHD直升机航母、防空驱逐舰、“安扎克”级护卫舰均配备 EOMSNG[14],是目前列装数量最多的全向凝视系统。
3.3 车载类系统
持续多年的反恐行动使车辆厂商意识到全向态势感知能力的重要性,自2009年之后相继推出类型繁多的车载全向探测系统,其原理与上述几种系统相似[15],不再赘述。
3.4 对比分析
表1是几类典型全向凝视系统的主要参数。从中可看出:(1)现有系统监视区域水平方向均可覆盖360°范围,垂直方向可定制,故存在球形、半球形或指定区域范围三种情形,由使用环境决定。(2)针对目标辐射多样性,探测器采用远、中、近红外和可见光四类频谱,以中、远红外为主。(3)在传感器搭载方式上,除AN/AAQ-37内置机身外,其余系统均采用外置、外挂方案,对于舰艇其影响可忽略不计,但对飞机载荷与隐身性能造成明显影响。(4)DAEVX允许多名机组成员独立接收视频,支持多用户,可最大程度发挥机组效率,其他几型系统仅向主要操作对象提供服务。

表1 典型系统性能Tab.1 Typical system performance
4 发展趋势
现代战场体系对抗特征明显,武器信息化、精确化、隐身化、智能化水平不断提高,攻防对抗更加激烈。全向凝视探测可提高战场透明度,为顶层指挥系统争取反应时间和空间,有利于近距攻防对抗。从提出EODAS概念开始,多光谱探测器、图像处理、并行计算、高级人机接口等技术逐步与作战平台集成,在军事应用领域逐渐形成一种突破。在总体发展趋势上表现为:
(1)采用新型探测器和成像机制提升探测质量。DAIRS和MIDAS将探测器像素提升到1024×1024,奠定了对不可辨目标识别的基础。而新一代大面阵、小型化、低成本、多/超光谱红外探测器的应用[15],显著降低了目标辐射特性差异和红外抑制措施的影响。自适应以及超宽视场编码孔径等计算成像技术,在大视场高分辨率成像领域消除了均匀采样模式无法在无人机等紧凑型平台应用的弊端[16]。
(2)与作战平台紧密耦合衍生多类型飞行、作战辅助功能。基于探测、识别、跟踪等基本性能,全向凝视探测系统具备了火力监视、威胁预警、低能见度条件辅助导航等功能。但特殊的战场需求仍会催生其他功能,新型火控攻击方案指示、战场搜救指示、低空线缆障碍物规避指示、战场毁伤评估等功能会以模块形式逐步嵌入全向凝视探测系统中。
(3)以开放式体系结构解决移植与扩容障碍。作为一种突破性手段,全向凝视探测系统是一种必然趋势。现有二次集成模式牺牲了平台的隐身、载荷性能,提高了成本。未来的全向凝视设备将采用开放式体系结构,其结果是从硬件上可最大限度的利用COTS商品,在扩充传感器通道、嵌入新型功能、升级计算能力和兼容作战平台中降低成本和难度,与平台系统紧密耦合,实现系统软、硬件功能模块的“即插即用”。
5 结语
美国国家研究理事会编写的《驾驶光:21世纪光科学和工程》提到:“将来光学系统必将是全新类型防务应用的基础,这些应用将再次改变战争的方式”。作战平台在现代战场中对全向监视的迫切需求,随着全向凝视探测系统的出现得到了缓解。外军全向凝视探测技术的研究与发展,为我们提供了可借鉴之处。国内在图像处理、宽试场低畸变镜头、全景成像机制、总线集成、态势感知领域有大量研究基础,应与作战平台结合,缩短与外军同型装备的代差。
[1] CHENG Qidong.Missile warning on U.S.Air force fighter jets[J].AeroWeaponry,1992(6):45 -46.(in Chinese)程启东.美国空军战斗机上的导弹告警[J].航空兵器,1992(6):45-46.
[2] William F.O'Neil.Processing requirements for the first electro-optic system of the twenty-first century[C].16th DASC//AIAA/IEEE,1997:(5.1 - 15)- (5.1 -22).
[3] FAN Jinxiang,WU Jinfang.The state of the art and future vision of the distributed-aperture Infrared sensor system[J].Modern Defense Technology,2000,28(4):45 - 51.(in Chinese)范晋祥,吴金方.分布孔径红外系统的研究现状及其展望[J].现代防御技术,2000,28(4):45 -51.
[4] Thomas C Brusgard,GAO Guolong.Distributed - aperture infrared sensor systems[J].Infrared,2001(9):32 - 35.(in Chinese)Thomas C Brusgard,高国龙.采用分布式孔径的红外敏感器系统(上)[J].红外,2001(9):32-35.
[5] Thomas C Brusgard,GAO Guo - long.Distributed - aperture infrared sensor systems[J].Infrared,2001(10):38-43.(in Chinese)Thomas C Brusgard,高国龙.采用分布式孔径的红外敏感器系统(下)[J].红外,2001(10):38-43.
[6] LAN Tian,LU Nanyan.Application and development of electro- optical distributed aperture system[J].Infrared and Laser Engineering,2007,36(S2):553 - 556.(in Chinese)蓝天,陆南燕.光电分布式孔径系统的应用和发展研究[J].红外与激光工程,2007,36(增刊):553 -556.
[7] LV Mingchun,LIANG Hongwei.Panorama gaze - type electro- optic detection technology[J].Electro - optic Technology Application,2008,23(1):42 - 44.(in Chinese)吕明春,梁红卫.全向凝视型光电探测技术[J].光电技术应用,2008,23(1):42 -44.
[8] Frank Colucci.Keep one eye out[J].Avionics Magazine,2011,35(12):22 -31.
[9] Advanced Distributed Aperture System(ADAS)[EB/OL].http://www.youtube.com/watch?v=PhrgH_u24dc,2012 -07 -09.
[10] VIGILX Distributed Aperture Enhanced Vision System[EB/OL].http://www.finmeccanicausa.com/Capabilities/PDF/vigilx.pdf,2014 -3 -10.
[11]SilentWatch EO/DAS [ EB/OL ]. http://www.northropgrumman.com/Capabilities/SilentWatchEODAS/Pages/default.aspx,2014 -3 -10.
[12] Michael Engel,Amir Navot,et al.Sea spotter:a fully staring naval IRST system[C].Proc.SPIE 8704,Infrared Technology and Applications XXXIX,87040K(2013).
[13]DCNS selects Sagem EOMS- NG optronic system for French frigates[EB/OL].http://www.naval- technology.com/news/newsdcns-selects-sagem -eoms-ngoptronic-system-for-french-frigates/,2014-3-10.
[14] WU Lei.Development of Armored vehicle fire control and situation awareness equipment[J].Foreign Tank,2012(7):16 -19.(in Chinese)吴磊.装甲车辆火控及态势感知装备发展[J].国外坦克,2012(7):16-19.
[15] ZHANG Xue,LIANG Xiaogeng.Development of and demands for infrared detectors[J].Electronics Optics &Control,2013,20(2):41 -45.(in Chinese)张雪,梁晓庚.红外探测器发展需求[J].电光与控制,2013,20(2):41 -45.
[16] FAN Jinxiang,YANG Jianyu.Analysis on effectiveness of antiaircraftmissile with structures of composite materials[J].Infrared and Laser Engineering,2012,41(12):3145 -3153.(in Chinese)范晋祥,杨建宇.红外成像探测技术发展趋势分析[J].红外与激光工程,2012,41(12):3145 -3153.
