车道变换过程中的攻击性驾驶行为研究
2014-03-20李星星
李星星
(镇江市规划设计研究院,江苏 镇江 212000)
0 引言
交通仿真是一个既复杂又富有挑战性的领域,它可以帮助决策者和设计者更好地理解某些交通行为和现象,避免道路设计上的失误,节约成本。仿真中最困难的是如何模拟驾驶人的特性。现有软件中封装的驾驶行为模型都非常先进,但是对于驾驶人情感的描述仍远远不够。在驾驶过程中最重要的情感之一就是攻击性。攻击性的驾驶行为表现在整个驾驶过程中,因此,合理地表现攻击性驾驶行为,是未来交通仿真必须要做的事情。
1 攻击性驾驶
1.1 攻击性驾驶的定义
攻击性驾驶(Aggressive Driving)是1961年由M.Parry最早提出的,他指出“行驶压力的加重在心理上所产生的潜在效应远比车辆在机械上的效应来得重要”[1]。随后的研究中许多学者和组织给出了攻击性驾驶的定义,但由于难以界定,至今仍未统一。较权威的定义诸如:美国国家公路交通安全管理局[2]将其定义为“一种危害或倾向于危害人身财产安全的驾车方式,其驾驶更倾向于表现为超速驾驶、追尾、从右侧超车、闯红灯、大声鸣笛等驾驶行为”;Lajunen等[4]依据社会心理学中攻击的基本定义将其定义为“企图对其他道路使用者造成身体上或心理上的损伤、伤害的,任何形式的驾驶行为”;Shinnar[3]从环境角度认为攻击性驾驶是挫折驾驶的工具性并发症,是带着引起他人身体上或心理上伤害的动机的,直接指向他人的行为;Jasper[5]认为攻击性驾驶行为是驾驶人有意的,由于急躁、烦恼、敌意或企图节省时间,而发生的可能会增加碰撞的危险的行为。
1.2 攻击性驾驶行为的表现形式
攻击性驾驶行为是驾驶人对现状交通的不满或性格冲动的体现,主要表现在车辆的跟驰、车道变换和寻找最佳空挡等驾驶行为中。
Tasca在其研究中列出了交通中常见的攻击性驾驶行为的13种表现形式[6]。骆勇根据攻击性驾驶行为产生的机理和表现形式,将其分为三个层次,即底层的消极驾驶、中层的攻击性驾驶和高层的道路暴力犯罪[1],如图1所示。
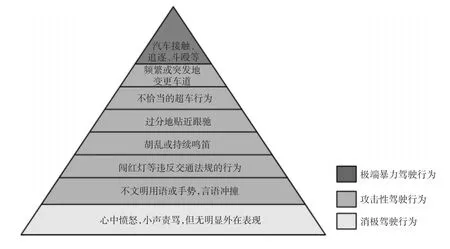
图1 攻击性驾驶行为的三个层次
1.3 攻击性驾驶行为的影响因素
一般认为,人作为交通四要素的主体,除了受自身因素的控制之外,还受许多外在因素的影响,攻击性的驾驶行为倾向于来自交通环境产生的负面效应,如行车环境舒适度差、交通拥堵和信号控制等方面引起的延误。概括起来主要有以下两方面因素:个人因素和交通环境因素。
1.3.1 人的因素
驾驶人对于自身行为能力的控制原本就有差异,不同驾驶人会因个人生长环境、性别、年龄、家庭教育等因素形成不同的人格特性及表现形式。
(1)人的年龄和性别
Hauber[7]从调查中发现攻击性驾驶行为在性别上差异不显著,但在年龄上差异显著。丁靖艳[8]通过调查发现年龄大于50岁的驾驶人表现出较强的攻击性,且女性的攻击性高于男性。
(2)人的性格
医学上一般将人的性格分为胆汁质、粘液质、抑郁质和多血质四种类型。相应的驾驶行为表现如下:
①胆汁质驾驶人做事果断,行车速度较快,容易被激怒而做出危险的报复行为,表现出较强的攻击性;
②黏液质驾驶人行车稳定,不易受外界干扰,能严格遵守交通规则,攻击性最弱;
③抑郁质驾驶人行车中虽有主动礼让的精神,但容易受他人驾驶行为的影响,一旦遇到超车、让车、会车等不顺心的情况产生固执情绪时,便会做出攻击性行为;
④多血质驾驶人动作敏捷,行车中能够坚持礼让,车速随着情绪的变化有较大的波动,但不易表现出过激行为,攻击性较弱。
(3)人的情绪
人的情绪是产生攻击性行为的直接原因,愤怒情绪会导致后继攻击性的驾驶行为。Lajunen[4]等人对104名自愿驾驶人调查后发现易愤怒的驾驶人确实表现出更多的攻击性驾驶行为。Neighbors等人[9]对111名大学生驾驶人进行问卷调查后发现,在驾驶过程中攻击性行为多数因他人的粗鲁行为或冒险驾驶所致,很少是由交通拥堵或延误引发的。
(4)人的驾驶经验和驾驶技能
丁靖艳[8]调查发现3年以上驾龄的人表现出较高的攻击性。高龄驾驶人不仅技能熟练,而且在驾驶过程中学会了在遇到问题时如何适当调整自己的计划、目标以及期望,但当他们在行驶中长时间遇到阻碍时,会因无法顺利完成计划、目标而感到愤怒,进而会实施一些如口头牢骚等人际间的攻击性行为,来宣泄自己的不满。
Lajunen等人[4]也认为自我评定驾驶技能高者在被其他车辆阻挡时较易愤怒而产生攻击性驾驶行为。安全驾驶技能得分与攻击性行为的频次呈显著负相关。
1.3.2 交通环境因素
天气、道路交通状况和道路交通设施等交通环境都有可能影响攻击性驾驶行为的发生:(1)雨天开车,快速行车容易导致雨水溅湿路边的行人和非机动车者;(2)交通拥堵,增加了行车延误,车辆更容易发生频繁、突然的车道变换;(3)存在性能较差或设置不合理的交通设施或信号灯,如标志设立位置不当、红绿灯时相的设计不合理、道路限速太低等,都有可能促使攻击性驾驶行为的发生。
2 现有车道变换模型中攻击性驾驶行为描述
微观交通中的每个车辆都有其自己的特性,诸如尺寸、平均车速和制动性能等。这使得车辆间相互关联成为可能,如在运行过程中,后车与前车之间必须保持一定的间距,以便有足够时间对前车突然变换驾驶行为做出反应,而不至于导致前后车发生碰撞或刮擦。在现有的商业软件中,以PARAMICS,VISSIM和AIMSUN应用最为广泛,为此,本文选择这3个仿真软件,对车道变换模型中关于攻击性驾驶行为的描述进行分析。
2.1 PARAMICS车道变换模型
在PARAMICS[10]里,车辆被表示为驾驶人-车辆单元(Driver-Vehicle Unit)。每个单元包括以下属性:类型、车辆的年龄、起点、终点、攻击性、意识等。车辆在产生换道意图后,会判断与目标车道上前后车的空档,若大于其车头间距,就执行换道。模型在考虑与前车的车头间距时,加入了攻击性属性,且攻击性仅被用作计算与前车的车头间距。
2.2 VISSIM车道变换模型
VISSIM[11]中有两种车道变换的类型:必要车道变换和自由车道变换。在必要车道变换中,驾驶行为参数包含了该车辆和换到新车道上的车辆的最大可接受减速度,这个减速度取决于车辆与下一个路径的路段连接器上紧急停车位置的距离;在自由车道变换时,VISSIM会检测新车道上跟驰车辆的期望安全距离,这个安全距离取决前面车辆和想变换车道车辆的行驶速度。自由车道变换中设有攻击性程度参数。
在这两种换道情况下,当驾驶人试图变换车道时,首先需要在其行驶方向上寻找合适的空档。空档的大小取决于变道车辆的车速、需要变换到的车道上的后面紧随车辆的车速,此外对于必要的车道变换,还取决于“攻击性”,也就是对应的最大减速度。
2.3 AIMSUN车道变换模型
AIMSUN[12]的车道变换基于Gipps的车道变换模型。其换道依赖于转弯的可行性、距离下一个转弯的距离和接下来的交通环境:速度及排队长度。如果车辆有意图进行换道,就需要检查是否期望换道,是换道后行驶速度更快,还是换道后排队长度减小。另一个需考虑的问题是是否可以换道,有没有足够的换道空间。这取决于变道车辆对目标车道后车强加的制动距离和变道车辆的制动距离。如果这两个制动距离都可以被满足,车辆将执行换道。
AIMSUN车道变换模型没有考虑驾驶人的攻击性行为,仅考虑了驾驶人的交通特性对换道的影响。它将车辆距下一个转向点之间的距离分为3个区段,每个区段执行不同的换道意图,不同区段间的临界位置由不同驾驶人的特性决定。
2.4 分析及评价
3种仿真软件中对驾驶行为的定义十分类似,即每种类型的车辆都有一个期望车速,当车辆处于自由行驶状态时,以期望车速行驶,若前面有速度较低的车辆时该车将试图变换车道。在上面的3个模型中,VISSIM和PARAMICS考虑了攻击性的驾驶行为。VISSIM在自由车道变换中考虑了攻击性程度,但是用户无法对其进行设置,属于默认值。对于必要的车道变换,VISSIM也考虑到了攻击性行为,就是车辆最大减速度,以及最大减速度的衰减速度,用户可以设置最大减速度等参数,较为合理。PARAMICS中车辆间的期望车头间距考虑攻击性的驾驶行为,高的攻击性意味着小的期望车头间距。但是如果设置得非常高,会导致贴近跟驰的攻击性行为,而且攻击性的值是事先设置好的,在仿真中是一成不变的。
3 车道变换中攻击性驾驶行为的设置方法
3.1 攻击性驾驶行为的选择
由于攻击性驾驶行为的影响因素具有多样性、复杂性、模糊性、相关性、随机性、时变性和不确定性,驾驶人特征很难在仿真中完全体现。因此,需要对1.2节中提到的表现形式进行筛选,筛选标准就是该种表现形式在交通中出现最多,且容易通过仿真来实现。
国外学者对攻击性行为研究得比较深入,相关研究数据也较多。Shinar and Compton[5]对行车中的鸣笛、变道时的切入和通过路肩超车等攻击性驾驶行为进行了细致观测,研究发现最频繁的攻击性驾驶行为是超车或车道变换时的切入,约占总观察事件的73.8%,鸣笛性的攻击行为约占17.3%,利用路肩超车的攻击性行为约占8.9%。一项美国国家公路交通安全管理局[5]的调查也证实了换道切入是最普通的攻击性行为,约为36%,其次是贴近跟驰,约为19%。
因此,车道变换中主要考虑变道时的切入、鸣笛、利用路肩超车三种攻击性驾驶行为。
3.2 攻击性交通实体的设置
交通实体的攻击性可根据其两个影响因素来设置,并以不同的权重表示影响程度的大小。由于人和交通环境是静态变量,因此相关的攻击性行为都可通过这两个变量来表示。但在设置中会遇到下面两个问题:(1)如何设置这两个变量的权重,因为这些因素对攻击性驾驶行为的影响程度并不清楚;(2)攻击性驾驶行为出现的概率。为了使仿真模拟与实际交通相吻合,这两个问题必须经过一系列测试,通过验证驾驶行为与实际交通状况的吻合程度来实现。
3.3 攻击性驾驶行为的设置方法
换道模型一般包括4个环节:产生换道意图、选择目标车道、检测可接受的空挡和执行换道。换道行为作为一种决策行为,需要驾驶人根据具体的情况做出相应的反应。以下是各个环节中攻击性驾驶行为的设置方法。
在产生换道意图环节,车辆在受到前车和相邻车道上后车的限制时,可能通过鸣笛的方式来表示心中的不满,提示其他的驾驶人,车辆意图换道。鸣笛作为一种表达愤怒或敌意的行为,最主要是如何让鸣笛行为所指向的对象知道鸣笛的意图。最简单的方法可通过让车辆针对鸣笛对象产生一个攻击性的信号来实现,然后被鸣笛对象通过鸣笛来反应,并做出相应的行为。
在选择目标车道时,当目前车道的左右车道都不满足变道要求,而又有富余的路肩可通过时,攻击性的驾驶人可能通过路肩进行换道超车。该行为可通过设置横向行为规则,允许同车道行驶及从右侧超车的方法来实现。
当选中要变换的目标车道后,需要检测目标车道上前车和后车与目标车之间的空挡,具有攻击性的驾驶人可能在后车不满足换道的空挡时,强行切入,迫使后车减速让行,避免追尾或刮擦。切入是最经常发生的攻击性驾驶行为,因此这种行为的值域应该设置得较低。切入可以通过改变车道变换行为来实现。值得借鉴的是VISSIM对于车道变换中攻击性行为的设置方法。在交通仿真中,交通实体要保持自身与其他车道车辆间的横向距离,当车辆表现出这种攻击性行为时,它阻断其他车辆前进的唯一方法是改变车辆与目标车道后车的期望间距。
4 结语
本文将车道变换过程中经常出现的切入、利用路肩超车和鸣笛等攻击性驾驶行为纳入到车道变换的各个环节,探讨了车道变换中攻击性驾驶行为的设置方法,以期为微观交通仿真软件的优化提供一定的参考与借鉴。
[1] 骆勇.道路交通中攻击性驾驶行为分析与研究[D].成都:西南交通大学,2009.
[2] National Highway Traffic Safety Administration.Aggres⁃sion Driving and the Law[EB/OL].(2003-04-10)[2012-10-12].http://www.nhtsa.gov/people/injury/aggressive/Symposium/introduction.html.
[3] Shinnar D.Aggressive Driving:The Contribution of the Drivers and the Situation[J].Transportation Research Part F,1998(1):137-160.
[4] Lajunen T,Parker D,Straddling S G.Dimensions of Driver Anger,Aggressive and Highway Code Violations and Their Mediation by Safety Orientation in UK Drivers[J].Transpor⁃tation Research Part F:Traffic Psychology and Behavior,1998,1(2):107-121.
[5] Jasper Laagland.How to Model Aggressive Behavior in Traffic Simulation[EB/OL].(2005-10-06)[2012-10-12].http://referaat.cs.utwente.nl/conference/3/paper/7121/mod⁃eling-aggressive-behavior-in-traffic-simulation.pdf.
[6] Leo Tasca.A Review of the Literature on Aggressive Driv⁃ing Research[EB/OL].(2000-06-21)[2012-10-12].http://www.stopandgo.org/research/aggressive/tasca.pdf.
[7] Hauber A R.The Social Psychology of Driving Behavior and the Traffic Environment:Research on Aggressive Be⁃havior in Traffic[J].International Review of Applied Psy⁃chology,1980,29(4):461-474.
[8] 丁靖艳.机动车驾驶入侵犯驾驶行为的调查研究[J].中国人民公安大学学报:自然科学版,2009,59(1):88-92.
[9] Neighbors C,Victor N A,Knee C R.A Motivational Model of Driving Anger and Aggression[J].Personality and Social Psychology Bulletin,2002,28(3):324-335.
[10] SIAS.Paramics theory[Z].Edinburgh:S-Paramics Simu⁃lation Systems,2009.
[11] Planning Transport Verkehr AG(PTV).VISSIM version 5.0 manual[Z].Berlin:Innovative Transportation Con⁃cepts,Inc,2007.
[12] AIMSUN5.1 AG.AIMSUN version 5.1 manual[Z].Barce⁃lona:TSS-Transport Simulation Systems,2006.
