液压回转系统仿真
2014-03-20潘朝峰郭利强
潘朝峰,郭利强
(江苏科技大学能源与动力工程学院,江苏镇江212003)
回转机构是克令吊的重要组件,其动态特性直接影响整个系统的工作性能[1].回转机构在启动和制动时会产生巨大的惯性,对液压系统产生冲击,负载越大,影响越突出.回转液压系统设计不合理,会直接降低整机的使用寿命.目前,国内起重机的制造厂商主要依靠经验及类比方法进行回转液压系统设计,且通过样机试验来发现问题,这既需花费大量的时间和精力,又存在巨大的经济风险[2].通过液压系统仿真分析,可以发现设计不合理之处,并能够通过批处理为液压系统进行优化设计[3-8].
1 回转液压系统原理及背景
回转液压系统原理如图1.该系统采用电机带动定量液压泵,溢流阀限定系统最高压力,三位四通电磁换向阀控制转动平台的正反旋转,系统设有平衡阀,使工况运行更为平稳.

图1 回转机构液压系统原理Fig.1 Schematic diagram of hydraulic system on slew ing mechanism
2 液压模型建立
使用Amesim标准仿真模型库可以搭建最基本的液压系统.在Amesim中的Sketch模式下建立克令吊回转机构的液压系统模型(图2).

图2 在Amesim中创建的仿真模型Fig.2 Simulation model created in Amesim
在Amesim中的Parameter模块下对系统主要初始参数进行设定:减速比2218;马达排量80mL/r,额定转速1000 r/m;液压泵同液压马达;电机额度转速1000 r/m;溢流阀压力调定为23MPa.设定好各个元件的主要参数后进入Amesim中的Run模式下对克令吊回转机构的液压系统进行仿真、分析.
3 液压系统的仿真结果与分析
文中主要针对以下几种情况对克令吊回转液压系统进行了仿真分析:
1 )不同启动信号;
2 )不同制动信号;
3 )不同惯量信号;
4 )不同负载信号;
5 )不同工作压力.
在Run模式下把仿真精度设定成0.001 s,仿真时间设定为35 s.设定3种启动斜坡仿真信号,仿真结果如图3~5,斜坡坡度越小,启动时间越长,所对应的回转速度曲线抖动越小,速度越平稳,同时对应的马达启动压力特性曲线也比较平稳,马达液压压力激荡会越来越小,对机械设备的保养越有力.

图3 不同斜坡启动信号曲线Fig.3 Different slope start signal curve
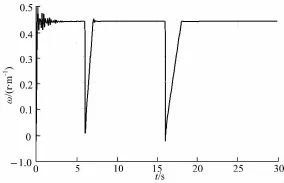
图4 不同斜坡信号对应的回转速度曲线Fig.4 Rotary speed curve corresponding to different ramp signal
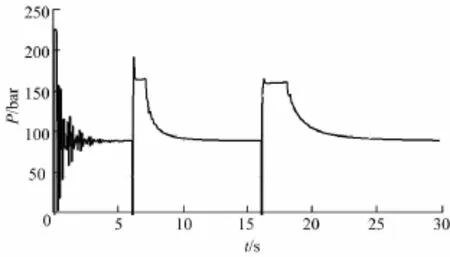
图5 不同启动斜坡信号对应的马达启动压力特性曲线Fig.5 Differentmotor start ramp signals corresponding to the starting pressure characteristic curve
设定3种制动斜坡信号,如图6,仿真结果如图7.

图6 不同斜坡制动信号曲线Fig.6 Brake signal curves w ith different slopes

图7 不同制动信号对应的马达压力特性曲线Fig.7 M otor pressure curves of different brake signal
制动曲线坡度越小,制动时间越长,液压马达两端的液压压力变化将会由激荡猛烈,马达两端液压压力大小交替变化(这时液压冲击厉害,对设备不利),变得越来越趋于平缓,并且马达两端压力大小不会出现交替现象.从图7中可以看出:启动时间有一定的滞后,这使得系统冲击力减小,回转速度更加平稳,同时一定的制动时间可以预防马达反转.因此若得到马达制动最佳时间,既可以快速制动又可以不损坏机械设备.如果提高制动时间,且系统液压压力冲击可以限制在一定的标准,对于液压系统的设计是最理想的.

图8 不同惯量对回转速度的影响Fig.8 Effects of different inertia of rotary speed
图8,9为工作转动惯量为5×106kg·m2,1×107kg·m2,2×107kg·m2,3×107kg·m2,4×107kg·m2时的速度特性曲线和马达启动压力特性曲线.由图8可见,在其他条件不变的情况下,转动惯量越小,系统动态响应越快,但是波动幅度比较大.随着转动惯量的增大,相应速度虽然慢些,但是速度曲线在达到目标速度后变得更加平稳,说明在一定的惯量范围内,相应回转速度和平稳度是最佳的,如提高惯量范围,液压系统的设计会更加理想;从图9可以看出,液压马达压力在惯量小时相应速度快,但是液压冲击比较激烈,随着转动惯量的增加,速度相会应减慢,但是液压启动压力会对应减小,变得更平稳些.因此,通过合适的液压系统启动时间,和制动时间以及惯量大小的控制,可以提高回转作业的平稳性,同时在转动惯量适合的工况下具有较高的作业效率,且不损坏机械设备.

图9 不同惯量对马达启动压力的影响Fig.9 Effects of different inertia on themotor starting pressure
图10,11为摩擦阻力为1.0×105N,1.8×105N,2.6×105N,3.6×105N,4.6×105N,5.6×105N时的马达压力特性、回转平台速度变化仿真曲线.从图10可以看出,工作阻力越大,马达液压压力越大,达到工作压力的相应时间越长,如果要求长时间处于恶劣的工况下,对于机械设备的设计要求会更高.由图11可见,负载越大,工况越恶劣,摩擦阻力越大,回转系统速度曲线响应变时间变长,工况复杂恶劣的情况下,工作效率会变得较差,这时如果要正常工作,对机械设备的设计水平会更高.

图10 不同负载工况下马达启动压力特性变化Fig.1 0 Different load motor starting pressure characteristics
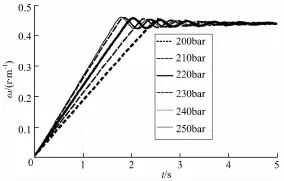
图11 不同负载工况下回转平台速度变化Fig.1 1 Different load change rate under the condition of rotary p latform
图12,13为不同工作压力下对回转速度和马达启动特性的影响.由图可见,工作压力越高,回转机构的回转速度和液压马达的压力曲线响应就越快,但是,系统液压冲击比较激烈,对系统的设备要求比较高,会投资更大,才能满足工作压力要求,同时会增加系统对密封元件精度的提高.所以,在系统工作压力得到满足的前提下,尽量降低工作压力,不仅可以降低系统的冲击,还满足速度响应要求,这样也可以减少能耗.
图12 不同工作压力下系统速度变化Fig.1 2 Speed change of the system under different working pressure
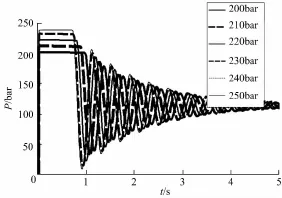
图13 不同工作压力下马达启动压力变化Fig.1 3 Motor start pressure changes under different working pressure
通过以上分析得出如下优化参数:启、制动时间3~6 s,工作压力为230MPa,马达转速为1 000 (r/min),惯量为1~3×107kg·m2,马达排量为80mL/r.
4 结论
1 )通过对回转液压系统仿真分析,得出转动惯量对回转动态特性影响较大,并且回转制动时压力冲击明显,平台会出现来回晃动的现象.起重机在回转过程中运行平稳,但在停止时存在抖动现象,立即停止时更为明显,若停止操作过快甚至会引起吊臂乃至整个起重机随之晃动的现象.解决方案:①设计合理的缓冲回路是减少和控制液压冲击的有效方法;②选择合适的启动、停止时间,以缓解启动和停车的冲击.
2 )在Amesim中通过对比分析不同参数下的仿真结果,适当增加转动惯量不仅可以提高系统的稳定性,而且系统响应的快速性基本保持不变.在保证系统正常工作压力的前提下,尽量降低压力值,不仅会大幅度增加系统稳定性,而且还会降低液压系统所承受到的液压冲击力.
3 )根据实际工况理论设计的比较,文中设计的液压原理图经过仿真分析发现,速度曲线基本与实际要求一样,所以该仿真软件的应用是正确的.启停时间分析为控制系统的设计提供了有利参数.
References)
[1] 易迪升,彭勇,易曦,等.起重机回转控制阀启制动性能研究[J].建筑机械,2012(10):114-116.
YiDisheng,Peng Yong,Yi Xi,etal.The startand braking performance study of crane rotary control valve[J].Construction Machinery,2012(10):114-116.(in Chinese)
[2] 卫振勇.AMESim的液压绞车液压系统研究[J].起重运输机械,2011,(5):71-73.
[3] 邬国秀.基于AMESim的阀控液压缸液压伺服系统仿真[J].机械,2012,35(1):28-30.
Wu Guoxiu.Simulation of valve-controlled cylinder hydraulic serve system based on AMESIM[J].Machinery,2012,35(1):28-30.(in Chinese)
[4] 张莉.起重1克令吊的损坏与修复[J].科技资讯,2009(1):62.
[5] 张成凤,龚苏生,徐长生.基于AMESim的船用甲板起重机变幅液压系统仿真研究[J].起重运输机械,2012 (7):64-67.
[6] 吴亚锋,郭军.基于AMESim的飞机液压系统仿真技术的应用研究[J].沈阳工业大学学报,2007,29(4): 368-371.
Wu Yafeng,Guo Jun.Research on simulation technique based on AMESim for aircraft[J].Journal of Shenyang University of Technology,2007,29(4):368-371.(in Chinese)
[7] 陈晋市,刘昕晖,王同建,等.平衡阀对起重机起升系统抖动现象的影响因素[J].中国工程机械学报,2010,8(1):46-50.
Chen Jinshi,Liu Xihui,Wang Tongjian,et al.Effects of balancing valves on shaking from crane lifting systems[J].Chinese Journal of Construction Machinery,2010,8 (1):46-50.(in Chinese)
[8] 许利君.张志华.翟磊.900t提梁机起升卷扬系统两种平衡阀的比较[J].建筑机械,2010(6):117-118.
