液控核辐射环境拆除机器人控制系统
2014-03-18皮明杨涛张华
皮明,杨涛,张华
(西南科技大学信息工程学院,特殊环境机器人技术四川省重点实验室,四川绵阳621010)
0 前言
2011年3月发生的日本福岛核电特大泄漏事故和1986年4月的切尔诺贝利核事故造成了巨大的人员和物资损失,从而也使核电安全问题越来越成为全球各国关注的焦点。新近建设的核电站虽然在设计阶段对可能发生的意外情况作了预防和缓解,但由于运行设备的老化和操作失误等原因[1-2],仍由可能引发严重事故。福岛核事故的发生除与地震灾害有直接关系外,也与设备老化(福岛核电站一号机组服役超过40年)有直接关系。而在我国现运营的13 台机组当中,秦山和大亚湾核电站运行时间也均超过17年,正值设备检修、更换的频繁期[3]。因此,必须对核电设施进行严格的监测和维护,及时发现并更换老化、故障设备,并对废弃核装置进行去污和拆卸等处理,以保证核电站正常、安全地运行[4]。而这些作业通常环境复杂,场地狭窄,含有大量辐射,不便于人的长时间作业。液压驱动的拆除机器人,与电机驱动的机器人相比,具有体积更小、负载更大的优势,其灵活性和实用性也已得到了实践的检验。
Brokk 多功能拆除机器人是瑞典布鲁克公司(Brokk AB)生成的液压铲除设备,可用在建筑拆除、抢险救援、核能高危等行业[5]。具有遥控操作、安全、高效的特点。该机为电液驱动,采用无线/有限遥控方式,使操作人员远离危险现场,在遥控盒上操纵机器人,确保安全。根据工作的不同,其可更换不同的工作头,如液压破碎锤、液压剪等,最大效率地利用现有设备。
而国内惊天液压公司生产的多功能拆除机器人[6],为国内唯一的遥控拆除机器人,拥有完全的自主知识产权。但其操作的灵活性和控制精度仍不如Brokk 机器人,有待进一步的提高。
文中针对核辐射环境下的工作特点,设计了一种更加适合精细作业的液控拆除机械臂,在对其几何结构特性进行描述之后,采用负载反馈式变量泵电液比例液压系统,对各液压缸和液压马达进行闭环控制伺服调节。最后,通过一个液压锤的作业任务(凿出一个φ400 mm 的圆孔)的仿真,验证了机器人液控系统的有效性。
1 基本构造和结构模型
液控拆除机器人主要由六自由度机械臂、快速更换接头、回转机构、履带行走机构、前支撑铲、动力装置、液压系统和机罩等组成,如图1所示。
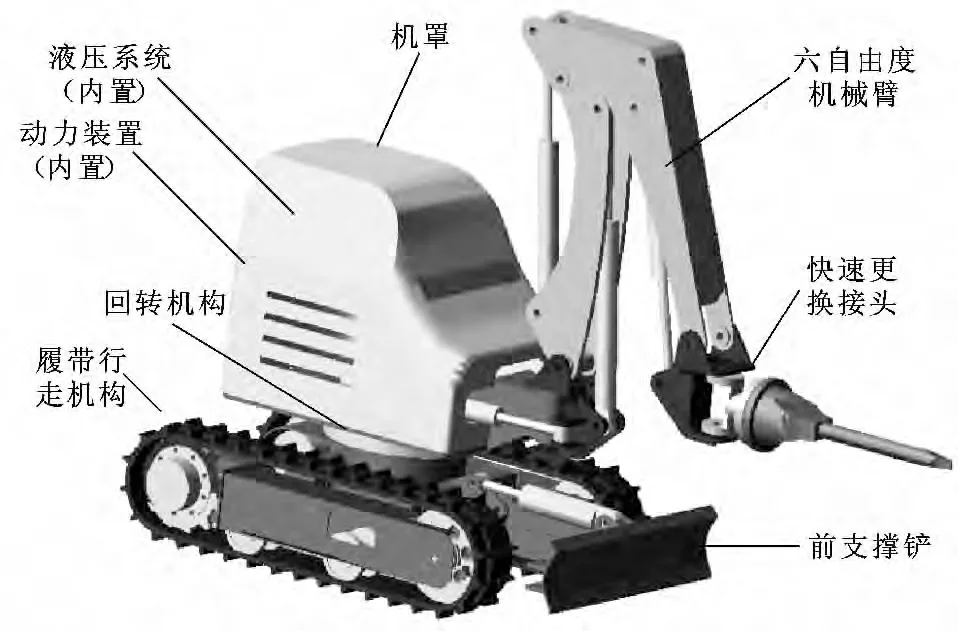
图1 液控拆除机器人构造
六自由度机械臂由肩关节、2 节工作臂、肘关节和快速更换接头,以及4 个液压缸和2 个液压马达等组成,各部件之间铰接连接,依靠4 个液压缸和2 个液压马达的伸缩和回转实现拆除机器人的各种动作。
液压马达1 内置于肘关节内部,通过前端的行星减速器与快速更换接头连接。马达内部集成了制动、缓冲和防反弹等控制阀,可实现快速更换接头的回转、制动和定位等一系列动作。液压马达2 内置于快速更换接头内部,其前端的行星减速器与工作装置连接。马达内部同样集成了控制阀,可实现工作装置的回转、制动和定位等动作。
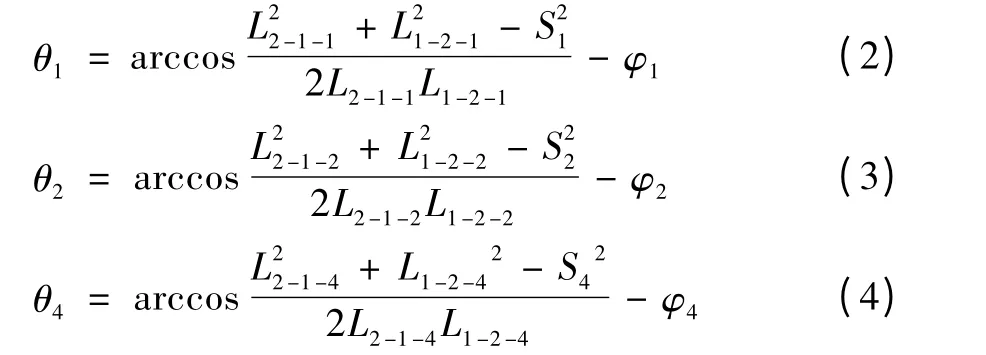
液压缸1、2、3 和4 用于实现肩关节、工作臂和肘关节的摆动,其摆动量与相应的液压缸的伸缩量成对应关系。在图2 中,液压缸3 的伸缩量S3决定了关节3(即:工作臂1 与工作臂2 之间的夹角)的转动角度θ3的值。
θ1-3+θ2-3+θ3+θ4-3=360°
θ1-3=360°-θ2-3-θ3-θ4-3
θ3由机械臂逆运动学可得,为变量;
θ4-3为工作臂2 的结构参数,为常数。
则


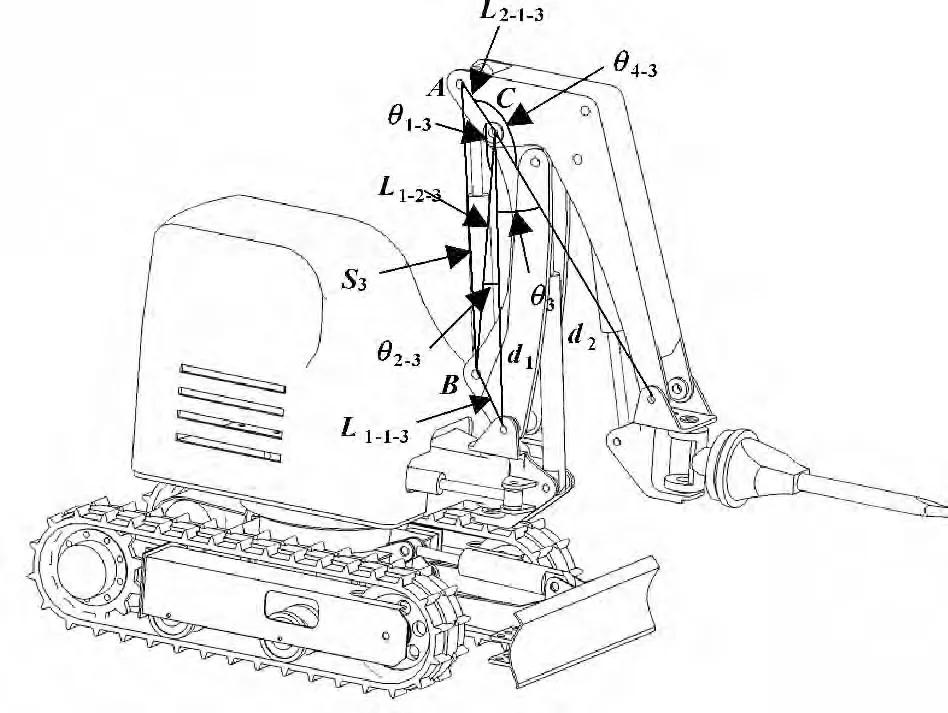
图2 液压缸3 与关节夹角3 的对应关系
对于肩关节和肘关节处的摆动角度θ1、θ2和θ4,其对应关系相对简单。
2 抗辐射加固
2.1 非金属材质抗辐射性能
拆除机器人机械结构本体采用合金钢,但其密封器件、油液管路和电子控制系统等大部分采用的是橡胶和塑料等有机高分子材料,当辐照时间、剂量超过其相应的承受阈值时,如:辐照剂量远远大于100Gray 时,就会发生质变、老化甚至燃烧等情况。因此,在拆除机器人进入核辐射现场之前,必须对相关零部件,如:密封圈、电线胶皮、橡胶履带等进行辐照实验,确定其是否可以在现场长时间安全作业。
2.2 电气控制元件的抗辐射加固
电气控制元件在辐照情况下发生失灵、损坏等现象,一方面是因为电线胶皮老化造成的短路引起的,另一方面是由于处理器或晶闸管等本身受辐照影响损坏造成的。因此,电气控制元件的抗辐射加固,除了要对电线胶皮、电路板等进行辐照性能试验外,还要额外地增加辐照屏蔽装置,以保护处理器、晶闸管等元器件。
屏蔽装置通常是用铅板组成一个腔体,罩住要保护的部位。但这种方法不但价格昂贵,而且增加了控制器的质量和体积,从而有可能影响机器人的回转和机械臂的灵活性等。而采用含重金属离子的高分子涂料或复合材料[7-9],不仅可以达到相同的保护效果,而且由于质量和体积的大为减少,也使机器人能够获得更优异的控制性能。
3 液压控制系统组成
3.1 液压泵的选型
为适应现场工作环境,六自由度机械臂必须具有多液压缸、液压马达协同运动能力,即:多液压缸、液压马达同时动作,但又不影响彼此的运动。为此,采用目前较为成熟的负载反馈式电液比例液压控制系统[10]。同时为了节省功耗,采用负流量控制[11]方式对液压泵进行调节,如图3所示。

图3 液压泵负流量控制
在负流量控制中,节流器位于回油路上。当液压缸不动作时,液压泵泵出的液压油流经电磁阀组后通过回油路流回油箱,此时节流器压力最大,控制器采集压力信号后,控制变量泵使它们排量最小;而当液压缸动作时,液压油通过液压缸后流回油箱,而不通过节流器,此时节流器压力降低,控制器则控制变量泵排量增大,增加的排量进入液压缸,用于执行动作。这样就可以减少机械臂保持位姿时的液控系统的能量损失,同时也延长了各零部件的使用寿命。
由于液压执行器同时动作时所需液压油量远高于保持位姿时,故采用“主泵+ 辅泵”的供油模式。当液压执行器保持位姿或同时动作但所需流量较小时,只有主泵供油;当液压执行器同时动作所需流量较大时,主泵和辅泵一起供油。相比单泵供油,在相同的供油量调节范围内,“主泵+辅泵”供油模式调节精度更高,并且在低供油量阶段,由于辅泵不参与供油,因此也减少了系统额外的能量损失。
3.2 液压系统工作过程
工作过程如图4所示,液压泵均为变量柱塞泵,与电机轴通过弹性联轴器连接。当电机转动时,驱动变量柱塞泵工作,产生的高压液压油通过电磁阀组A供给六自由度机械臂和液压工作装置,电磁阀组A中各电磁阀的开口量由控制器给出。由于采用的是负载反馈式电液比例液压系统,因此各液压执行器不会产生负载耦合,其运动行程和速度也只与各自电磁阀开口量有关,与负载无关。
另一路高压液压油经回转接头通向机器人底盘,也采用负载反馈式电液比例液压系统,通过电磁阀组B 控制底盘液压执行器的动作。
液压缸和液压马达均经过抗辐射加固和集成化改造,其密封装置和传感器均能长时间在大剂量辐照下正常工作。液压缸和液压马达位移输出端分别加装直线位移传感器和角位移传感器,输出信号接入控制系统,形成液压执行器的闭环控制。液压马达内部集成制动、缓冲和防反弹等控制阀,便于系统控制;而由于本身具有缓冲结构,液压缸只需集成液压锁就可具有制动、缓冲等功能。
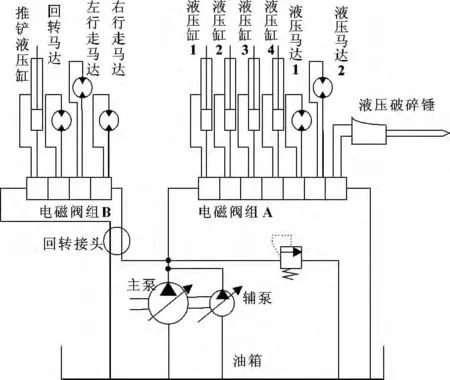
图4 液压系统原理示意图
4 液控系统仿真
在Adams 中构建拆除机器人的模型,添加各液压执行器驱动、位移传感器等,生成EASY5 可以识别的目标文件AD(Adams Mechanism)。由于液压破碎锤不需要旋转运动,故将液压马达2 锁死,只需控制前五个自由度即可。拆除机器人六自由度机械臂参数如表1所示。
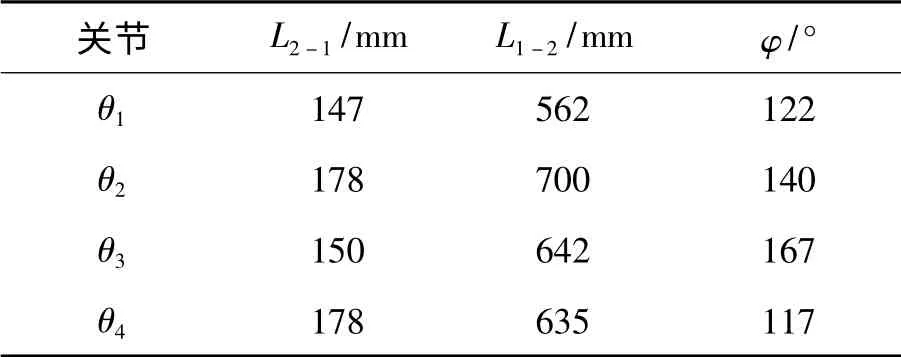
表1 六自由度机械臂参数
在EASY5 中构建拆除机器人六自由度机械臂的液控系统,不包括液压马达2 的控制回路,如图5所示。
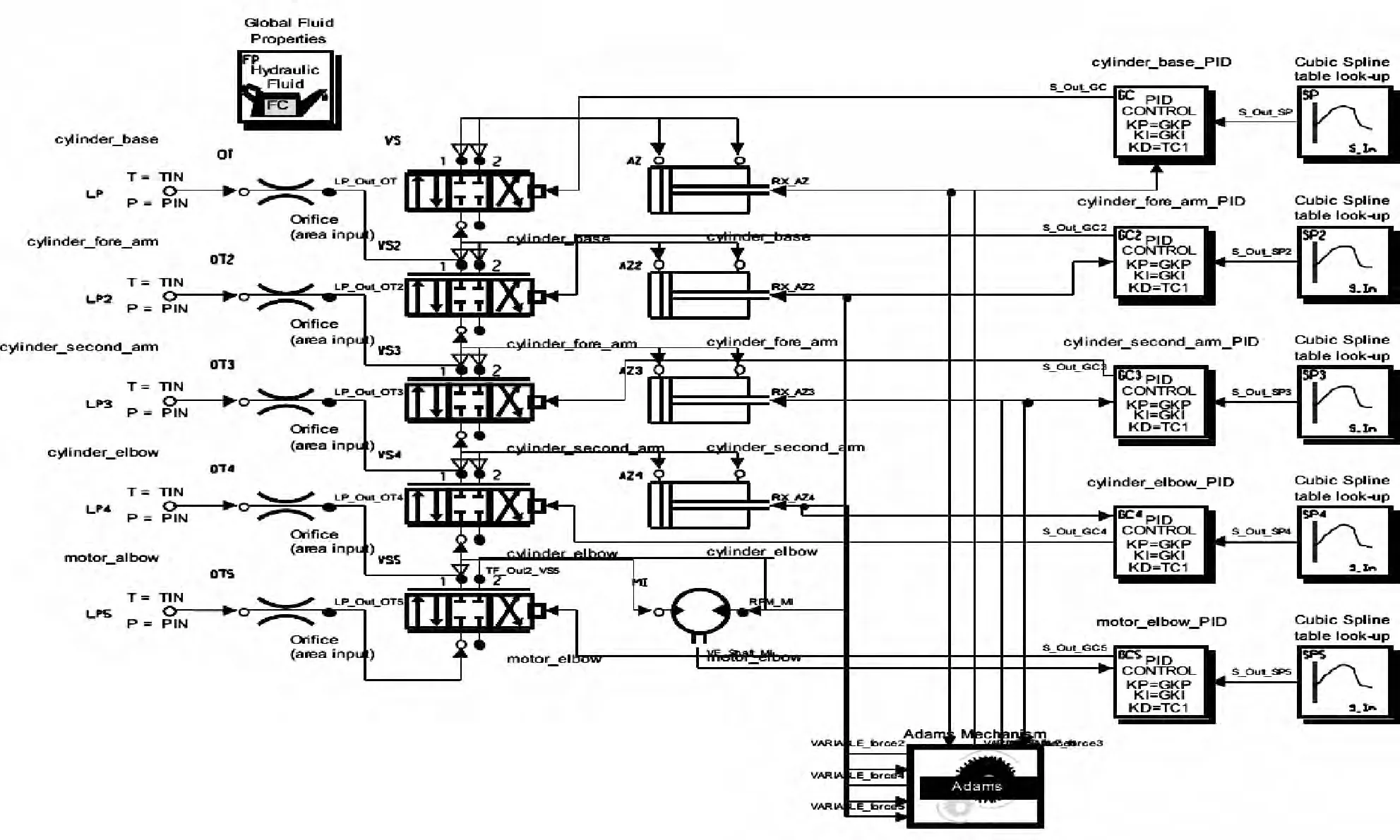
图5 六自由度机械臂液控仿真模型(不包括液压马达2 控制回路)
图5 中,液压缸1、2、3、4 和液压马达1,形成6 个自由度,共同决定液压破碎锤的位姿。由于采用负载反馈式电液比例液压系统,通过电磁阀的流量只与电磁阀开口量有关,故采用恒压源模块LP1 ~5 模拟液压泵对执行器的供油。根据第一节中的介绍,液压缸伸缩量与关节转角的关系(液压马达转角等于相应关节转角),结合运动学逆解算法求出各执行器动作量与时间的对应关系,并以表格形式存储在模块FU1 ~5 中,再通过PID 调节模块对电磁阀输入电流进行调节,控制液压缸伸缩量和液压马达转动量,并将伸缩量和转动量实时传给AD(Adams Mechanism)模块,同时获得作用于各自执行器末端的阻力和阻力矩。这样就实现了液控系统模型与六自由度机械臂结构模型的控制的耦合。具体仿真结果如图6所示。
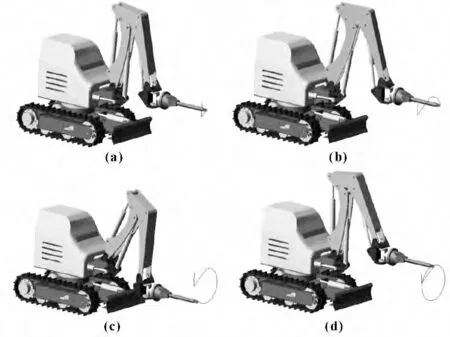
图6 六自由度机械臂液控仿真结果
液压破碎锤末端按照规划的运动轨迹凿出了一个φ400 mm 的圆孔,完成了设定的任务,表明了液控系统模型的正确性和有效性。
5 结论
针对核辐射环境下的应用要求,研制开发了一种液压驱动的拆除机器人系统,并对其几何结构特性和液控系统进行了详细分析,最后,通过一个液压锤的作业任务(凿出一个φ400 mm 的圆孔)的仿真,验证了机器人液控系统的有效性。
[1]BUCKINGHAM R O,GRAHAM A C.Dexterous Manipulators for Nuclear Inspection and Maintenance-Case Study[C]//1st International Conference on Applied Robotics for the Power Industry.Piscataway,NJ,USA:IEEE,2010:6.
[2]ROBERTSON D,TAYLOR C J.State-dependent Control of a Hydraulically-actuated Nuclear Decommissioning Robot[C].Control(CONTROL),2012 UKACC International Conference on,2012:759-764.
[3]GOSSE lin,CLEMENT.Under-actuated Versatile Gripper for the Cleaning of Nuclear Sites[C].Applied Robotics for the Power Industry(CARPI),2010 1st International Conference on.
[4]BERKOWITZ D A.Nuclear Power and Radionuclides in the Environment[J].Power Generation and Environmental Change,2013:21.
[5]王进.Brokk 多功能拆除机器人及其应用[J].建筑机械,2006(11):83-85.
[6]张振军.拆除机器人液压系统研究[D].西安:长安大学,2009.
[7]马涛,刘宇艳,刘振国,等.一种新型梯度防核辐射材料的制备[J].高分子报,2012(16210):58-62.
[8]CHEYMOL G,VILLARD J F,Gusarov A,et al.Fiber Optic Extensometer for High Radiation and High Temperature Nuclear Applications[C].Advancements in Nuclear Instrumentation Measurement Methods and their Applications(ANIMMA),2011 2nd International Conference on.
[9]RUNKLE R C,BERNSTEIN A,VANIER P E.Securing Special Nuclear Material:Recent Advances in Neutron Detection and Their role in Nonproliferation[J].Journal of Applied Physics Volume,2010,108:111101-111101.
[10]KIM KI Yong,JANG Dal Sik,CHO Yong Lak,et al.Development of Electro-hydraulic Control Valve for Intelligent Excavator.ICCAS-SICE,2009:2212-2216.
[11]LIAO Wen Bin,CHEN Shu Mei,CHEN Chuan Ming,et al.Research of Negative Flow Control Characteristics for Axial Piston Pump Based on Hydraulic and Mechanical Co-simulation.System Science[C].Engineering Design and Manufacturing Informatization(ICSEM),2012 3rd International Conference on.
