基于Agent航空器滑行避让过程的建模与仿真
2014-03-14徐肖豪
张 佳,徐肖豪,高 伟
(1.中国南方航空股份有限公司运行指挥中心,广州 510000;2.中国民航大学空中交通管理研究基地,天津 300300)
基于Agent航空器滑行避让过程的建模与仿真
张 佳1,徐肖豪2,高 伟2
(1.中国南方航空股份有限公司运行指挥中心,广州 510000;2.中国民航大学空中交通管理研究基地,天津 300300)
针对航空器地面滑行过程中出现的冲突避让问题,采用多Agent方法,在满足航空器规则与流程的基础上,设计了符合管制员思维的分布式多Agent模型。对每个Agent的功能以及Agent之间的交互进行了详细的描述,同时利用事件驱动(event-condition-action)语言描述了Agent推理过程。最后利用Anylogic仿真平台对多Agent模型进行验证,验证结果证明采用规则的算法可智能有效地避免航空器冲突,且符合航空器的运行流程。
滑行道;Agent;航空器运行;规则;冲突与避让
随着机场逐步向大型化与繁忙化发展,机场的滑行道结构日益复杂。在航空器滑行的过程中,管制员依靠十分有限的自动化辅助设备做出各种复杂的决策,当机场拥堵时,管制员的负荷急剧上升,出现航空器相互碰撞的事件也时有发生。国际民航组织早在2004年就提出A-SMGCS[1](先进机场场面引导与控制系统,advanced surface movement guidance and control systems)。该系统利用传感技术取得航空器在机场的位置信息,对航空器滑行过程实施引导,以此来避免航空器产生滑行冲突,提高机场场面运行效率。近些年,美国联邦航空局(FAA)提出了下一代空中交通系统(NextGen),其运行特征要求表明:航空器的智能运行可能被用于高密度的机场场面运行来加速地面滑行的效率[2]。有关机场场面智能运行的研究正在成为重要研究内容。在此背景下,本文对航空器滑行避让行为进行了研究。
研究地面滑行过程的方法比较常见的有两种:一种是构建混合整数规划模型,通过数学模型来得到航空器的最优路径,在航空器计划阶段就完成航空器运行流程方案。此种方法灵活性较差,同时机场地面滑行过程包含很多运行规则,而这些规则很难用数学模型描述清楚。另一种方法是采用现成的仿真工具,如SIMMOD[3]、TAAM[4]等快速仿真工具。这类仿真工具能够快速地仿真整个机场的运行状态,提供机场的容量等宏观指标。但从微观上看,对航空器的运行过程考虑不够精细。
因此,本文先研究了航空器地面滑行的流程与规则,结合机场地面管制员的思维模式,利用Agent自组织性和并行计算特征,设计了多Agent架构用于解决全局性和局部冲突的探测与避让。在构建Agent推理机的过程中,把冲突探测与避让过程用事件驱动规则(event-condition-action)[5]语言表达。为验证该构架的合理性,设计了体现多种冲突的测试场景和滑行计划,并在Anylogic平台[6]上验证仿真结果。
1 航空器的地面滑行分析
1.1 机场地面网络图
机场的网络结构[7]是指航空器活动的轨迹集合。机场的滑行网络可以用有向图G=(N,E)表示,其中N={ni|i=1,…,k}是G的节点集,E={ei=(np,nq)|i=1,2,…,m;np,nq∈N}是G的线段集。每个节点代表滑行道的交叉点,一系列的有顺序的点可以代表一条滑行路径。在研究的过程中,可以为点或线段添加其他属性,如某些点集代表机位,某些线为快速滑行道等。
1.2 航空器的运行流程与规则
航空器在机场的运行过程中主要处在3个位置:停机位、滑行道、跑道。其中航空器在滑行道的滑行过程比较复杂,它与航空器的滑行路径、停机位、机型等因素有关。根据机场地面管制的运行流程,进港航空器运行流程为:航空器离开脱离道→航空器在主滑行道上滑行→航空器在交叉点(线)等待→航空器继续滑行→航空器在机坪区等待→航空器请求许可进入机坪区域→航空器滑行到机位,离港航空器运行流程与之相反。
航空器在滑行的过程中必须遵守一定的规则。如滑行的航空器必须被分配路径、滑行速度满足一定限制、交叉口通过的优先级等。
1.3 航空器的冲突与解脱分析
为了实现航空器的智能避让,首先要分析航空器如何产生冲突,以及冲突避让的办法。按照上面流程的划分,航空器在滑行过程中,出现冲突的区域可能在机坪区域也可能在主滑行区域。机坪区域主要的冲突有航空器间的推出冲突、航空器滑行与推出冲突、航空器的滑行与滑行冲突[8]。在主滑行道上主要有交叉口冲突(2架飞机同时经过一个交叉口)、动态单向线的冲突(2架飞机同时经过一条公共的线段)。在文献[9]中详细地分析了机坪区的冲突特点。本文又加入了主滑行道的冲突分析。由于分析的过程大体类似,下面给出机坪区的一种场景和主滑行道的冲突中的一种情况。
1.3.1 机坪区冲突分析
A、B航空器在邻近时刻推出,通过相同的Spot点出机坪区域。A航空器阻碍B航空器的推出,如图1所示。
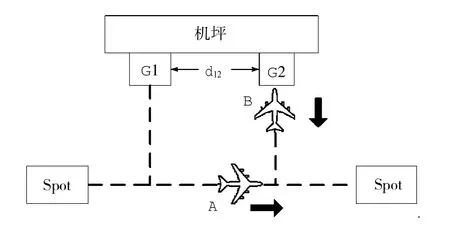
图1 两离港航空器冲突演示Fig.1 Conflicts display of two departing aircrafts
假设航空器A滑行到航空器B的机位延长线与机坪滑行道的交点时,航空器B刚好推出到机位延长线,把此种情况叫做航空器发生冲突的临界条件。到达此时刻,航空器A经过了由自身机位推出、从自身机位滑行到B航空器所停机位两个阶段,而航空器B经过了推出过程。
根据以上分析,航空器发生冲突的临界条件的表达式为
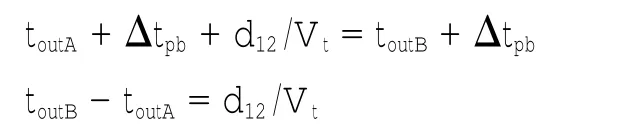
其中:toutA、toutB表示A、B航空器的出发时刻;Δtpb为推出时间;d12为G1机位与G2机位航空器滑行的距离;Vt为航空器滑行的速度。在实际过程中,滑行的冲突不可能完全精确。为了使航空器的冲突探测更加合理,认为航空器到达该位置左右一段距离都算作产生冲突,因此,引出冲突检测范围的概念。冲突的监测范围表达式为

其中:ε为最小时间间隔要求。
1.3.2 “十字”型主滑行道冲突分析
冲突产生的临界条件为,当A航空器与B航空器刚好滑行到此交叉点,表达式为

航空器在交叉点J产生交叉冲突,其中tgA、tgB为航空器刚离开机坪区域到主滑行区,或从主滑行道脱离口到进入机位区域的开始时刻。dJA、dJB为航空器到交叉点J的滑行距离。Vtm为滑行速度。
冲突监测范围为

对于一个“十字”型交叉口,如图2所示,当给定一个航空器位置,有3个方向的运行可能,如航空器在A口,可以向B、C、D 3个方向移动。另外一个航空器有3种位置可能(B、C、D),同时在3种可能的位置有3个方向的运行可能,如图中所示航空器在B口,有A、C、D 3种。因此,位置与方向的组合共有4×3× 3×3=108种。
表1表示在交叉口情况下航空器需要避让不同情况。*表示不可能情况,“单向”表示如果冲突发生,在此交叉口不能解决,为主滑行道上另一种冲突形式,“交叉”表示航空器的解决策略为让其中任意一架航空器等待,A、B、C、D分别表示由该位置滑出的航空器在对应的场景中具有优先级。

图2 典型的交叉口示意图Fig.2 Typical crossing

表1 “十字”交叉口航空器优先级(A→B)Tab.1 Aircraft priority(A→B)at“cross shaped”crossing
下面对表1中描述的情况进行详细说明,其中(A→B)表示其中一架航空器由A位置滑行到B位置,其他的类似。
1)航空器(A→B)则在交叉口不可能有另外一架飞机从A位置滑行到其他位置,因此(A→B)列在表中对应的值为*。
2)航空器(A→B)与航空器(B→A),2架航空器在此交叉口是不可能避让,因此(B→A)列在表格中对应的为“单向”。
3)航空器(A→B)与航空器(B→C),如果让A位置航空器由A滑向B,则会与在B位置的航空器产生冲突。此种情况下,只能让B位置的航空器滑行,因此(B→C)列的数值为“B”,表示B位置的航空器有优先权。
4)航空器(A→B)与航空器(C→B),根据地面路径的滑行规则,“左边航空器”有优先权。因此在A与C位置出发的航空器中,C位置有优先权,所以(C→B)列的值为“C”,表示在C位置的航空器有优先权。
5)航空器(A→B)与航空器(D→B),2架航空器之间在交叉口位置相对。因此让任意航空器等待都满足要求,因此(D→B)列的数值为“交叉”。
2 基于Agent滑行避让行为仿真建模
2.1 Agent功能介绍
基于Agent的滑行避让模型主要由4大类Agent组成,分别为注册Agent、航空器Agent、资源管理Agent、资源Agent。
航空器Agent接受滑行、等待、继续滑行等指令。同时记录航空器的重要状态时间(离开机位、滑出机坪区、滑入机位等)。
注册Agent 负责系统的初始化。如建立机场网络拓扑图、航班时刻、机型信息、航空器性能等、航空器常用滑行路径、各种常用的间隔参数等。在此基础上,初始化航空器Agent、资源管理Agent以及资源Agent。
资源管理Agent 按照机场资源类别进行管理,包括主滑行管理Agent、机坪管理Agent。
资源Agent根据各资源的不同特点分为交叉口Agent、动态单向Agent、机位Agent。
在以上设计的4个Agent中,重点描述资源管理Agent的结构。
资源管理Agent内部主要由传感器、状态器、知识库、效应器组成。图3所示为机坪管理Agent的内部结构。

图3 单个Agent结构Fig.3 Single Agent structure
传感器 从环境中提取有用信息给Agent,根据环境信息改变Agent状态。
状态器 接收传感器或其他Agent的通信信息来改变自身状态。
知识库 Agent通过学习得到的知识与规则的数据库。
效应器 结合Agent的状态,与知识库规则进行匹配,如果有相应匹配结果则执行相关动作,也可以改变环境或与其他Agent通信。
在单个Agent的设计过程中,用事件驱动规则描述知识库,即当Agent满足特定条件时,执行相关动作。下述表达式是对2个推出航空器之间推出避让进行推理,同时其他推理过程见文献[9]。
State(X1,X2,s1,s2)∧IsNear(X1,X2)∧Dist-ToSpot(X1,Spot(C1),D1)∧DistToSpot(X2,Spot(C2),D2)∧Time(X1,X2,T1,T2)→IsApronConflict(X1,X2)→(Maneuver(X1,X2,m1,m2))
State(X1,X2,s1,s2)表示航空器X1、X2的状态分别为s1、s2;IsNear(X1,X2)表示两航空器机位是否相邻;DistToSpot(X1,Spot(C1),D1)、DistToSpot(X2,Spot(C2),D2)分别表示X1、X2到机坪口的距离;Time(X1,X2,T1,T2)表示两航空器的准备推出时间;Is-ApronConflict(X1,X2)判断2架航空器是否退出冲突;(Maneuver(X1,X2,m1,m2))表示产生冲突后的解脱策略。具体执行过程为,首先判断2架航空器的状态。如果状态都为“机位等待”,再判断2架航空器所在机位是否相邻,在机位不相邻的情况下是不会产生推出冲突的。之后判断2架航空器到机坪口的距离,通过到达机坪口的距离得到机位之间的距离。当所有条件符合的情况下,比较2架航空器的推出时间,如果推出时间相近则可以判断2架航空器有推出冲突。如果产生冲突,则比较航空器的优先级,让优先级低的航空器在机位处等待,优先级高的航空器推出。当航空器推出后,改变航空器状态变为“正在推出”。
2.2 Agent之间的通信
通过对整个机场运行流程的分析,建立起Agent的组织结构。如图4所示,主滑行管理与机坪管理分别为不同类别的资源系统,通过Agent之间的协调,把整个系统构成一个整体。
Agent间的通信方式主要有两种[10],分别为黑板系统和消息传递方式。黑板系统用于航空器不需要与其他Agent之间交流,包括Agent查询公共信息,如地面网络结构、间隔参数、滑行路径。消息传递方式用于Agent通信有指定对象,包括航空器Agent与其他一个或几个航空器Agent通信、航空器Agent与资源管理Agent通信、资源管理Agent与资源Agent通信等。图5显示的为航空器进港Agent之间的交互流程。

图4 多Agent整体框架Fig.4 Multi-Agent integrated structure

图5 进港航空器交互流程Fig.5 Interactive process of arrival aircrafts
1)当接近航空器到达时间时,注册Agent动态创建航空器Agent,并且传递一些必要的属性和Agent目标。
2)航空器Agent根据自身目标情况申请主滑行道资源。
3)主滑行管理Agent查询自身资源管理的资源情况,如果有,返回信息给航空器Agent,同时标注其管理资源的信息。
4)资源Agent接受主滑行Agent信息进行判断。如交叉口Agent,在提供交叉口资源的时候,根据自身的规则判断,赋予不同航空器Agent优先级。
5)当航空器Agent滑行到机坪区时,用同样的方法向机坪管理Agent申请资源,直到航空器到达机位。
3 基于Agent滑行避让行为仿真试验
3.1 机场场面建模
仿真机场为一个中小型机场,跑道长度为3300m,图6中B、C、C1、C2、D、E为滑行道名称,G1~G9为机位名称。通过注册Agent生成地面网络拓扑图。图中显示进场与离场路径各一条,由于机场地面节点比较多,所以可形成多条路径。在Anylogic建模中,有定义线型的类,将这些类打包成容器可便于航空器Agent及其他Agent访问。

图6 仿真机场拓扑Fig.6 Airport simulation topology
仿真过程中航空器在主滑行道上平均速度为10 m/s,机坪附近滑行平均速度为3 m/s,航空器推出时间平均为1.5 min,航空器进机位时间为1 min。仿真时间1 s相当于实际时间15 s。
3.2 多Agent避让系统的测试
在Anylogic软件下建立Aircraft、Gate、GateManage、Maintaxi、MaintaxiManage 5个Agent,1个Main对象,Main对象仿真试验界面(Simulation)。Anylogic软件中每个Agent都有状态流程图。把航空器的重要状态设计为Agent状态图中的状态,同时为了实现功能的连续性设计相关的辅助状态。当Agent之间有通信时,Agent可以接受消息实现状态跳转。通过综合航班信息表、机位表、起飞报文信息,设计12架航空器进行测试,如表2所示。其中8架离港航空器,4架进港航空器。对于进港航班离港时刻为5,表示在系统时刻之外已经起飞。

表2 航班综合信息Tab.2 Flight synthetic information
当航空器没有采取规则避让时,运行过程中可能会产生很多冲突,冲突的类型与次数如表3所示。而当采取冲突避让规则时,航空器的运行情况如表4所示。

表3 航空器冲突类型与次数Tab.3 Types and times of flight conflicts
由表4可以看出,当航空器计划时刻与推出时刻不同时,说明航空器在机位处等待,其他等待时间可以查看表中滑行等待开始时刻、继续滑行时刻。通过比较滑行等待开始时刻与航空器到达或离开机坪口的时刻,可知航空器是在机坪口、机坪滑行道、或主滑行道等待。表中航班F10从不同的机坪口进入,滑行的优先级比较低,当机坪区没有航空器运行时才能进入机坪区,所以等待时间较长。
4 结语
文献[9]研究的为机坪区的2架航空器的冲突避让。当航空器数量增加到3架以上时,文献[9]中航空器的规则就不再适用,因此必须引入Agent的思想对整个系统进行控制,同时航空器的知识库结构更加复杂。通过本文研究,基于Agent的航空器冲突与避让模型能够用分布式的思想解决多航空器在滑行中出现的冲突问题,为航空器在机场智能滑行提供理论和实践依据。
Design and simulation of aircraft taxiing model based on Agent
ZHANG Jia1,XU Xiao-hao2,GAO Wei2
(1.System Operation Control Center,China Southern Airlines Co.Ltd.,Guangzhou 510000,China;2.Air Traffic Management Research Base,CAUC,Tianjin 300300,China)
To deal with the conflicts during aircrafts taxiing,a multi-Agent model is designed to meet the aircraft rules as well as controllers'experience.A detailed description is given for each Agent's function and the interaction between the Agents.At the same time,the Agent reasoning process is described by using event-condition-action language.Finally the Agent model is certified with the Anylogic simulation platform.The results show that the regular algorithm can not only avoid aircraft conflicts effectively and intelligently,but also suit the aircraft operation process.
taxiway;Agent;aircraft movement;rules;conflict and resolution
V355.1
:A
:1674-5590(2014)05-0001-05
2013-05-07;
:2013-11-13
:国家自然科学基金项目(61039001)
张 佳(1989—),男,湖北汉川人,硕士,研究方向为机场智能运行.