基于ADS-B的飞机冲突探测
2014-03-14倪育德马宇申
倪育德,马宇申,刘 萍
(中国民航大学智能信号与图像处理天津市重点实验室,天津 300300)
基于ADS-B的飞机冲突探测
倪育德,马宇申,刘 萍
(中国民航大学智能信号与图像处理天津市重点实验室,天津 300300)
面对飞行流量持续快速增长、民航空域资源日益短缺的状况,对飞机间的潜在冲突进行有效探测,是避免飞机间危险接近或碰撞发生的关键。对飞机周围区域进行合理建模,给出了一种基于广播式自动相关监视(ADS-B)技术的确定型冲突探测算法,充分利用ADS-B报文提供的经度、纬度、速度和航向等信息及其报文高更新率等特点,预先排除无威胁飞机,然后分别从水平和垂直两个方向对飞机之间的冲突进行探测。运用Matlab进行功能仿真,结果表明该算法能有效排除无威胁的飞机,并且能够对有威胁的飞机及时给出告警。该算法对保证自由飞行条件下的飞行安全具有积极意义。
广播式自动相关监视;冲突探测;自由飞行
民航运输业的快速发展导致空中交通的拥挤程度越来越高,飞机间的冲突概率大大增加,而传统雷达已无法应付高密度空域的监视,新一代通信、导航、监视与空中交通管理(即新航行系统)的新概念应运而生,其理念就是“自由飞行”,把更多的交通安全责任从地面转向空中。
自由飞行条件下,航路选择的任意性将大大增加冲突发生的可能,如何更有效地发现潜在冲突,及早进行冲突探测,对于飞行冲突的避免有着重要意义。文献[1]提出的自由飞行条件下冲突飞机的选择算法在排除无威胁飞机方面具有良好性能,可作为飞机冲突概率预测的预处理算法。文献[2]提出的“自由飞行下的冲突概率估计算法”可以有效预测对本机构成威胁的飞机,及早向飞行人员发出告警信息。文献[3]又在此基础上提出“适用于航路改变情况下的冲突概率预测算法”,可以更进一步探测出航路改变情况下的潜在冲突,有效防止冲突的发生。清华大学的王绍平和崔德光则给出了一种综合改进的冲突探测算法[4],该算法综合了确定型冲突探测方法和概率型冲突探测方法在工程应用中的优点,考虑了空管规则和简单的过滤算法,引入了持续探测方法。在中外学者研究的基础上,本文根据冲突飞机间的相对速度大小动态设定飞机的保护区域,为飞行员提供固定而充足的反应预警时间,并结合广播式自动相关监视(ADS-B)提供的丰富航行信息及高更新率等特点,给出一种基于ADS-B技术的确定型冲突探测算法。
1 广播式自动相关监视
ADS-B是基于全球导航卫星系统(GNSS)和空-地、空-空数据链完成信息传递和交通监视的空管新技术[5-6]。ADS-B首先接收通过飞行管理系统(FMS)和其他机载传感器等系统生成的信息,然后将这些信息转换成数字码,该数字码结合了飞机的四维位置信息(经度、纬度、高度和时间)和其他附加信息(冲突告警信息、飞行员输入信息、航迹角和航线拐点等)以及飞机的识别信息和类别信息,此外还可能包含其他的信息,如航向、空速、风速、风向和飞机外界温度等,每秒更新一次,由1 090 MHz射频通过数据链从飞机广播出来。位于可接收范围内的其它飞机和地面站就能接收到此数据链广播,将该信息显示在驾驶舱交通信息显示器(CDTI)上,可使飞行员获得可靠的高精度实时空中飞行动态信息,增强飞机位置识别能力。
ADS-B是新航行系统中非常重要的监视技术,它把冲突探测、冲突避免、冲突解脱、空中交通管制(ATC)监视以及CDTI信息显示有机的结合起来,将为新一代空管监视系统增强和扩展非常丰富和人性化的功能,同时也带来潜在的经济效益和社会效益[7-8]。因此,ADS-B被认为是提高安全飞行、高效飞行最有效的关键技术之一。
2 飞机周围区域建模
在自由飞行条件下,考虑空域中的飞机由于潜在位置信息的错误,以及统筹飞行安全和算法的可实现性,每一架飞机周围的区域被划分为避碰区域(CAZ)和保护区域(PAZ)。避碰区域和保护区域都是以飞机质心为中心的虚拟圆柱体,如图1所示,其中小圆柱体和大圆柱体分别代表避碰区域和保护区域。
以2架飞机的冲突探测为例,把飞机1视为一个移动的圆柱,飞机2视为质点,2架飞机在飞行过程中速率保持不变,当飞机2进入飞机1的CAZ时就产生了冲突。根据国际民航组织(ICAO)的间隔和空域安全专家组(SASP)对ADS-B提供类雷达服务下间隔的安全性给出的评估结论,航路和终端区可采用5 n mile的最小间隔,因此选取RCAZ=5 n mile,HCAZ=2 000 ft[9](1 ft=0.304 8 m,下同)。PAZ区域范围目前仍在讨论中,本文采用在CAZ区域范围的基础上,根据两机航迹和相对运动速度来动态设置PAZ的区域范围,即

图1 飞机周围区域划分Fig.1 Aircraft surrounding area division

其中:τhor、τvert分别为PAZ水平和垂直预留时间,且τhor=τvert=10 s;vr(t)与vr,vert(t)分别是两机在时刻t的水平和垂直相对速度;选取CAZ的时间门限为tc= 1 min,PAZ的时间门限为tp=2 min[10]。
探测飞机之间的冲突,应预先对危险飞机进行选择处理,即判断飞机之间是接近飞行还是远离飞行,如果是远离飞行,说明飞机之间无冲突;如果飞机之间是接近飞行,接着要判断飞机2的航迹是否经过飞机1的CAZ,如果不经过,说明飞机之间亦无冲突;如果飞机2的航迹经过飞机1的CAZ,那么需计算飞机2从水平方向进入飞机1的PAZ和CAZ的时间thp、thc,以及从垂直方向进入PAZ和CAZ的时间tvp和tvc,然后分别与时间门限tp、tc比较来判断是否告警,以此来实现冲突探测。
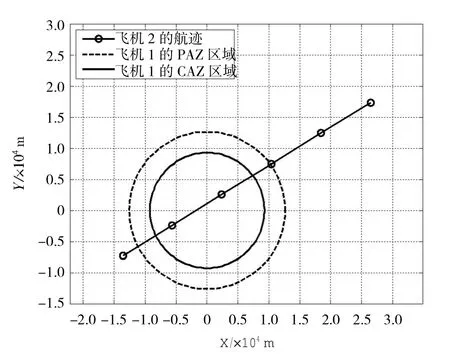
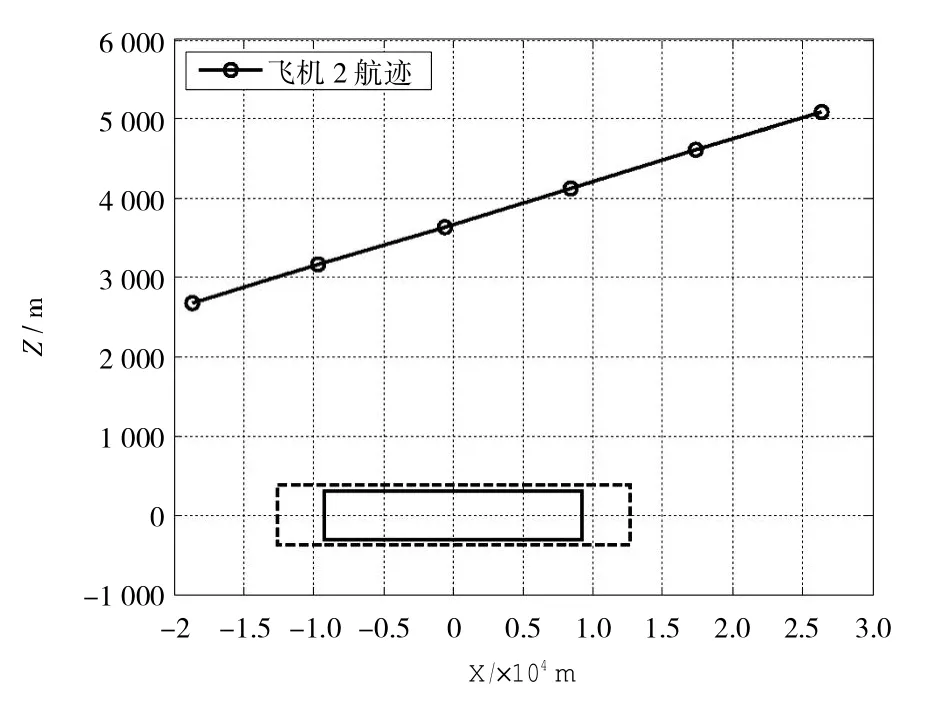
飞机2告警分为以下两个等级:①当飞机2的thp 确定型冲突探测算法主要依据ADS-B提供的位置、速度、航向等信息,参照WGS-84地心地固坐标系与地理坐标系的转换,对飞机的运动状态建立轨迹方程,由此可以对任意时刻的2架飞机进行安全性的比较,只有当水平方向和垂直方向冲突同时存在时,才判定冲突存在。 3.1 水平冲突探测 从水平方向看飞机的PAZ和CAZ,就是两个大小不同嵌套的圆。把飞机的水平运动状态分解为东向(E)和北向(N)进行分析,水平冲突探测分析如图2所示。 图2 水平冲突探测分析图Fig.2 Analysis figure of conflict detection in horizontal direction 把飞机1(目标飞机)和飞机2(本机)的经纬度作差处理,把飞机1看作静止,以O点作为飞机1的初始位置,那么飞机2相对于飞机1坐标为(xt,yt);v1、v2分别为飞机1和飞机2的水平地速,相对速度为vr1= v2-v1;φ1、φ2分别为飞机1和飞机2的航迹角。 首先判断2架飞机是远离飞行还是接近飞行,判断依据为 其中:xe1、yn1、xe2和yn2分别为飞机1、飞机2的东方向位置和北方向位置;ve1、vn1、ve2和vn2分别为飞机1、飞机2的东方向速度和北方向速度。如果s>0,表示两机远离飞行,反之,s<0表示两机接近飞行。 假设飞机2以速度vr1沿着AC方向接近飞机1飞行,且经过飞机1的CAZ,如图2所示。由ADS-B提供的位置、速度、航向等信息,就可以得到vr1的大小,然后根据式(1)来划分PAZ 根据ADS-B提供的航向信息,飞机2相对于飞机1的航迹线斜率k1为 飞机2相对于飞机1的航迹线方程为然后联合PAZ和CAZ圆的方程,分别计算飞机2的航迹线与飞机1的PAZ和CAZ区域的交点(xp,yp)、(xc,yc),继续计算此时飞机2到两交点的距离lp和lc,即 这样,就可分别得到飞机2到达飞机1的PAZ和CAZ区域的时间thp、thc为 根据计算的结果,再分别将thp与tp以及thc与tc的值进行比较,从而完成水平冲突探测。 3.2 垂直冲突探测 从垂直方向看飞机的PAZ和CAZ,就是两个大小不同嵌套的矩形。把飞机的垂直运动状态分解为东向(E)和地球外法线指向天顶方向(Z)进行分析,垂直冲突探测分析如图3所示。 图3 垂直冲突探测分析图Fig.3 Analysis figure of conflict detection in vertical direction 设飞机1东向速度为ve1,垂直速度为vz1;飞机2东向和垂直速度分别为ve2、vz2;相对垂直速度为vr,vert=其中:ve1= v1sin φ1,ve2=v2sin φ2,v1、v2分别是飞机1与飞机2的水平地速;φ3、φ4分别为v3和v4与Z轴的夹角。 飞机2相对于飞机1航迹线斜率k2为 飞机2相对于飞机1的相对坐标为(xt,zt),那么本机航迹方程为 首先判断飞机2航迹是否会进入飞机1的CAZ区域。由图3可知,CAZ区域矩形的4个顶点坐标分别为M1(-RCAZ,HCAZ/2)、H1(RCAZ,-HCAZ/2)、F1(RCAZ,HCAZ/2)及N1(-RCAZ,-HCAZ/2),把M1和H1点分成一组,F1和N1点分为另一组,分别代入式(11),得到 如果s1≥0且s2≥0,说明飞机2航迹线与飞机1的CAZ矩形区域不存在交点,反之则存在交点。 假设飞机2的航迹与PAZ和CAZ区域存在交点,并设起始时刻两机的高度差为h0,那么飞机2到达飞机1的PAZ和CAZ的时间分别为 然后分别比较tvp与tp以及tvc与tc之间的关系,确定垂直方向是否存在冲突。 对于平飞状态的飞机,其相对垂直速度vr,vert为0,此时PAZ区域消失,只有CAZ区域。此时只要判断两飞机的高度差是否满足h0∈(-HCAZ/2,HCAZ/2),如果满足则冲突存在,反之则不存在。 根据ADS-B信息能推测出飞机在未来某个时刻的大概位置,而且ADS-B信息实时更新,民航运输飞机在一段时间内一般不会产生较大的机动,所以该算法能够比较准确地进行冲突探测。 假设在飞机1的CAZ(5 n mile)外至40 n mile圆环内存在100架飞机,根据ADS-B报文模拟出这100架飞机在CDTI中的交通态势显示,报文数据结构A= [东向位置北向位置速度航向],报文数据产生规则为: 1)飞机的位置范围为5cos θ 2)在巡航飞行阶段,民航飞机的速度一般为700~ 1 000 km/h; 3)飞机的航向为φ∈[0,2π]。 100架飞机的模拟数据如图4所示,初始CDTI交通态势显示如图5所示。 经过选择排除远离飞行的飞机和不会经过飞机1 CAZ的飞机后,有危险接近飞机的交通态势显示如图6所示,总共有11架飞机。对100架飞机的模拟数据经过100 000次的Monte-Carlo实验,仿真结果得到平均的威胁飞机数量是8.634 7。冲突飞机数量概率分布如图7所示。剩余威胁飞机数量分布主要集中在7~12架,100架飞机经过算法排除后,只有少数飞机与飞机1可能存在冲突,说明此算法排除无威胁飞机方面性能良好,排除效果明显。 图4 100架飞机模拟数据Fig.4 Simulating data of 100 aircrafts 图5 初始CDTI交通态势显示Fig.5 Initial CDTI traffic situation display 图6 排除后的CDTI交通态势显示Fig.6 CDTI traffic situation display after exclusion 图7 冲突飞机数量概率分布Fig.7 Probability distribution of conflicting aircrafts’amount 经过算法排除无危险的飞机后,对可能存在冲突的飞机需要进一步探测。初始化配置参数,飞机1在A地区的经纬度为(39.076°N,116.82°E),飞机2在B地区的经纬度为(39.081°N,116.82°E);飞机1和飞机2的高度分别为h1=8 000 m,h2=7 000 m;飞机1和飞机2的速度分别为v1=800 km/h,v2=900 km/h;飞机1和飞机2的航迹角分别为φ1=10°,φ2=280°;飞机1和飞机2的垂直速度vz1、vz2分别为1 500 ft/min和-1 500 ft/min。 图8 水平冲突探测图Fig.8 Conflict detection in horizontal direction 水平方向的冲突探测如图8所示,可知飞机2的航迹线与飞机1的CAZ区域存在交点。经过计算,两机的相对速度vr1=334.488 7 m/s,飞机1的PAZ区域范围为RPAZ=12 605 m,飞机2到达飞机1的PAZ和CAZ区域的时间分别为thp=56.654 7 s,thc=66.690 9 s。由此可知,thp<2 min而thc>1 min,说明水平方向只进入了PAZ报警阶段。垂直方向的冲突探测如图9所示,经过计算,飞机1的PAZ区域范围大小为HPAZ= 762 m,由仿真结果得知,s1=1.290 4×107>0,s2= 1.350 9×107>0,说明飞机2的航迹线与飞机1的CAZ区域不存在交点,垂直方向无冲突存在。综合水平和垂直两个方向上的探测结果可知,2架飞机之间无冲突存在,可以按此时的飞行状态继续飞行。 图9 垂直冲突探测图Fig.9 Conflict detection in vertical direction 该飞机冲突探测算法在理论分析上具有良好的性能,充分利用了ADS-B提供的丰富航行信息及高速更新率等特点,相应的仿真实验也验证了算法的可用性。本文设定飞机的CAZ区域半径为5 n mile,并且在CAZ区域的基础上,根据相互冲突飞机的相对速度大小动态设定PAZ区域范围,为飞行员提供固定且充足的反应告警预留时间,只要接收到目标飞机的ADS-B信息,该算法就能有效判断两机之间是否会发生飞行冲突。对于多机冲突预警的问题,很多文献采用的是Delaunay网格对ADS-B提供的飞机位置信息进行关系分区,这样就只需分析每个区域中相互间有关联的飞机,不必将整个空域内的所有飞机每2架进行比较,因此提高了冲突探测的效率。但是此方法只是为冲突飞机提供了优先权的排序,归根到底还是2架飞机之间的探测,所以对于多机之间的冲突探测问题还需不断进行深入研究和探索。 [1]戴超成,肖 刚,敬忠良.采用ADS-B的冲突飞机选择算法[J].电光与控制,2011,18(10):11-14,19. [2]PAIELLIA R,ERZBERGER H.Conflict probability estimation for free flight[J].Journal of Guidance,Control and Dynamics,1997,20(3):588-596. [3]邓 伟,张 军,吴 限.一种适应于航路改变情况的冲突概率预测算法[J].北京航空航天大学学报,2005,31(12):1327-1331. [4]王绍平,崔德光.空中交通控制的冲突探测算法[J].清华大学学报(自然科学版),2004(10):1368-1371. [5]WHALEN D,RATHINAM S,BAGGE C.Advanced Developments in Airport Surface and Terminal Area Traffic Surveillance Applications[C]//Digital Avionics Systems Conference,Cedar Rapids,IA:IEEE Press,2003. [6]罗文田,赵泽荣,张德银.基于ADS-B的飞机预警避撞算法研究[J].控制工程,2011,18(4):559-563. [7]MAXIME GARIEL,FABRICE KUNZI,JOHN HANSMAN R.An Algorithm for Conflict Detection in Dense Traffic Using ADS-Bs[C]//30thDigtal Avionics System Conference,2011. [8]ROXANEH CHAMLOU,MClEAN,VIRGINIA.Design Principles and Algorithm Development for Two Types of Next Airborne Conflict Detection and Collision Avoidances[C]//2010 Integrated Communications Navigation and Surveillance(ICNS)Conference,2010. [9]程丽媛.自由飞行空域中多机冲突探测与解脱技术研究[D].南京:南京航空航天大学,2005. [10]沈佳峰.民机TCAS机动策略与仿真研究[D].上海:上海交通大学,2011. (责任编辑:杨媛媛) Aircraft conflict detection based on ADS-B NI Yu-de,MA Yu-shen,LIU Ping With continually rapid growth of flight flow and increasing shortage of civil aviation airspace,effective detection of latent aircraft conflicts becomes the key to avoid aircrafts'dangerous approach or collision occurrence.By establishing reasonable model around aircraft zone,a deterministic conflict detection algorithm is presented based on ADS-B(automatic dependent surveillance-broadcast),which first eliminates threatening aircraft,then detects aircraft conflict in horizontal and vertical directions respectively by making full use of the information such as longitude,latitude,velocity and heading of aircraft provided by ADS-B message and the ADS-B message characteristics including high-speed update rate.Matlab simulation is carried out about this detection algorithm,results show that this algorithm can remove no-threatening aircraft effectively,and timely warning can be given for threatening aircraft.This algorithm has positive significance to guarantee flight safety for free flight. ADS-B;conflict detection;free flight V249 :A :1674-5590(2014)05-0031-05 2013-09-03; :2013-10-17 天津市智能信号与图像处理重点实验室开放基金项目(TJKLASP-2012-4);中央高校基本科研业务费专项(ZXH2011C013) 倪育德(1963—),男,江西鹰潭人,教授,工学硕士,研究方向为无线电导航与监视.3 冲突探测模型












4 仿真实验




5 结语
(Intelligent Signal and Image Processing Key Lab of Tianjin,CAUC,Tianjin 300300,China)