基于Gauss-Hermite求积分卡尔曼滤波的SINS非线性初始对准方法
2014-03-13冉昌艳程向红王海鹏
冉昌艳 程向红 王海鹏
(1 东南大学仪器科学与工程学院,南京210096)
(2 三峡大学计算机与信息学院,宜昌443002)
初始对准是捷联惯导系统(SINS)中的关键技术之一.当失准角较大时,常规的线性误差模型不能准确描述SINS 误差传播特性,需要采用更为精确的非线性误差模型,使得Kalman 滤波的应用受到限制.因此,各种非线性滤波方法不断得到应用.其中扩展卡尔曼滤波(EKF),由于运算速度快和易于工程实现而应用最为广泛,但系统非线性特征较强时,局部线性化会带来很大的误差,甚至会导致滤波发散.无迹卡尔曼滤波(UKF)[1]对状态的概率密度函数用高斯分布进行近似,文献[2]将其与H∞滤波相结合,应用于有色噪声条件下的SINS大方位失准角初始对准,取得了较好的效果.容积卡尔曼滤波(CKF)[3]采用求容积规则选取容积点及其权重,运算量比UKF 小,精度和UKF 相当,郝燕玲等[4]将其用于SINS 动基座初始对准中,取得了远优于EKF 的对准精度和收敛速度.Gauss-Hermite 求 积 分 卡 尔 曼 滤 波(QKF)[5-7]是 一 种 基 于Gauss-Hermite 数值积分的递归贝叶斯滤波方法,已被证实比EKF 和UKF 具有更高的估计精度,且能够通过增加单变量Gauss 积分点而获得更高阶精度.
本文将QKF 应用到SINS 大方位失准角初始对准中,分别采用QKF 和比例对称采样UKF 进行SINS 动基座大方位角初始对准的仿真.仿真结果表明:当方位失准角较大时,QKF 对准精度比UKF高,且收敛速度快;而且当单变量的Gauss 点增加时,QKF 的对准精度还可以进一步的提高.
1 单变量Gauss 积分点配置方法
Gauss-Hermite 求积分公式为

式中,x 为一标量.式(1)是一个带权积分公式,其权函数为ω(x)=e-x2,m 个Gauss 点xi为Hermite多项式Hm(x)的零点,Hm(x)和m 个Gauss 系数Ai分别为

式(1)中的Gauss 积分公式具有2m-1 次代数精确度,m 值越大,精度越高.Gauss 点及其相应的Gauss 系数分别由式(2)和(3)求得,均与被积函数g(x)无关,且Gauss 型求积分公式是稳定的,也是收敛的,通常制成表格,因此可通过查表得到[8].
设随机变量x 服从高斯分布N(0,1),其函数g(x)的期望为E(g(x)),通过变量代换可变换成标准的Gauss-Hermite 求积分公式,即

利用Gauss-Hermite 求积分公式的Gauss 点和Gauss 系数,可将E(g(x))表示为

式中,ξi和ai可通过计算对称三角矩阵J 的特征值和特征向量的方法[7]得到.
当x~N(μ,σ2)时,令z~(x- μ)/σ,则z~N(0,1),因此讨论x~N(0,1)的Gauss-Hermite 求积分问题不失一般性.
2 多变量Gauss 积分点配置方法
假设x 是nx维随机向量,其各分量相互独立,且均服从N(0,1)高斯分布,每个分量Gauss-Hermite 求积分点取m 个.向量x 的函数g(x)的期望E(g(x))表示为

由于各分量相互独立,并将单个分量的m 个Gauss 点和其相应的系数代入,则可得到向量的Gauss 点和其对应的系数,即
式中,ai和ξi为向量x 的第i 个Gauss 系数及Gauss 点向量;ξi1,…,ξinx为向量x 各分量对应的Gauss 点;{ξi1,…,ξinx}T表示由单个分量的Gauss点(共m 个)组合构成的Gauss 点向量(共mnx个);aij为Gauss 点ξij相对应的Gauss 系数;表示nx个分量的Gauss 系数aij的乘积.
若设单变量Gauss 点数为m,则多变量Gauss点数L=mnx,多变量的Gauss 点和Gauss 系数可以由单变量的Gauss 点进行Kronecker 张量积[9]扩展得到.
3 QKF 求积分卡尔曼滤波算法
考虑如下具有加性噪声的非线性系统方程和观测方程:
式中,xk为nx维状态向量,其各分量独立,且服从高斯分布;zk为nz维观测向量;f(·)和h(·)分别为非线性的状态函数和量测函数;wk和vk分别为过程噪声和量测噪声,且满足

式中,δkj为δ 函数.QKF 算法如下[5,7,10]:
1)初始化状态变量及其均方差

2)时间更新
分解前一步的方差阵为

计算高斯积分点,即

通过非线性状态函数传播的高斯积分点为

状态一步预测为

一步预测方差阵为

3)量测更新
一步预测方差阵分解为

一步预测状态高斯积分点为

通过非线性量测函数传播的量测高斯积分点为

一步预测量测值为

一步预测量测方差阵为

一步预测协方差阵为

卡尔曼增益为

状态更新为

状态方差阵更新为

根据参考文献[11]中简化的UKF 方法,类似地,也可以将上述QKF 算法在量测方程为线性方程时予以简化,设

将量测更新步骤中式(17)~(20)简化为

式(21)简化为

式(22)简化为

上述滤波算法中,ai,ξi,L 分别为多变量的Gauss 系数、Gauss 点向量以及总的Gauss 点数.
4 SINS 大方位失准角非线性误差模型
理想导航坐标系(n 系)与实际SINS 模拟的数学平台坐标系(c 系)之间的关系可以用姿态误差矩阵Ccn来表示,设φe,φn,φu分别为n 系至c 系的数学平台误差角,即东向、北向、天向姿态失准角.当φe和φn均为小量时,Ccn可简化为[2,4]

速度误差方程为[4,11]

大方位失准角姿态误差方程为[4,11]

定义系统状态向量为

噪声向量为

观测量取量测速度之差,即z =[δVe,δVn]T,则SINS 非线性滤波模型为

式中,H= [ I2×202×8];v 为量测噪声,假设为零均值高斯白噪声.该滤波模型中状态方程为非线性,观测方程为线性,可通过四阶龙格库塔方法进行离散化处理后,采用简化QKF 算法进行滤波.
5 仿真分析
5.1 Gauss 积分点配置
3 点QKF 中状态向量单个分量的Gauss 点取3 个,即m=3,单变量的3 个Gauss 点和其对应的系数通过式(2)、(3)和(6)求出,分别为

如果状态向量有10 个分量,即nx=10,由式(8)将单变量的Gauss 点和系数通过张量积法扩展到10 维的Gauss 点向量及其相应的系数,则L =310,如果状态向量维数nx=5,则L=35.
5 点QKF,即m=5,单变量的5 个Gauss 点和其对应系数分别为


如选取状态向量维数nx=5,则L=55.
7 点QKF,m =7,单变量的7 个Gauss 点和其对应系数分别为

选取状态向量维数nx=5,则L=75.
5.2 仿真条件
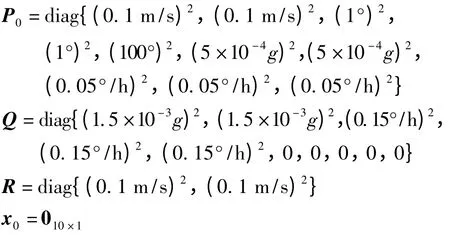
航行速度为10 m/s,初始速度误差为0.1 m/s,匀速直航,航向、纵摇、横摇的摇摆幅值分别为2.5°,2.5°和12°,相应的周期分别为6,8 和10 s,姿态更新周期为0.01 s,滤波周期为1 s,陀螺仪3个方向的常值漂移设为0.05 °/h,噪声设为0.15°/h,加速度计偏置设为5 ×10-4g,噪声设为1.5 ×10-3g,初始位置为北纬32°、东经118.8°,初始航向角、纵摇角、横摇角均为0°,初始水平失准角均设为1°,初始天向失准角为100°.
设滤波器的初始条件为
5.3 仿真结果
根据5.2 节仿真条件,分别采用比例对称采样UKF(α =0.01,k =-7,β =2,n =10)[11]和3 点QKF 进行SINS 动基座初始对准仿真,仿真时间为600 s,仿真过程中进行反馈修正.
由于2 个水平失准角的估计误差曲线相近,故只给出天向和北向的失准角估计误差曲线,如图1所示.
图1(a)中,当仿真时间为200 s 时,QKF 的天向失准角估计误差约为119′,UKF 的天向失准角估计误差约为997′,当仿真时间为600 s 时,精度差值达到479′,QKF 的天向失准角估计精度明显高于UKF.另外,当仿真时间为200 s 时,QKF 基本收敛,而此时UKF 还未收敛,QKF 收敛速度也要快于UKF.

图1 UKF 与3 点QKF 天向和北向失准角估计误差
在水平失准角估计误差方面,2 种非线性滤波算法比较接近,估计误差均很小,收敛速度均较快.图1(b)中,当仿真时间为600 s 时,QKF 的北向失准角估计误差约为3.7′,UKF 的北向失准角估计误差约为3.8′,QKF 的水平失准角精度略高于UKF;同样地,当仿真时间为30 s 时,QKF 基本收敛,而此时UKF 还未收敛,QKF 收敛速度快于UKF.
仿真还发现,随着初始天向失准角增大,两者收敛速度均会变慢,但QKF 的收敛速度要快于UKF;在精度方面,当初始天向失准角小于30°时,两者对准精度差别较小,随着初始天向失准角增大,两者对准精度均会变差,QKF 的精度变化幅度小于UKF,两者精度差距逐渐变大,如图2所示.
Gauss-Hermite 数值积分公式具有2m-1 次代数精确度,即3 点QKF 中的Gauss 积分代数精度能够达到5 阶,而UKF 中的积分代数精度最高为3阶.初始天向失准角较小时,非线性程度不深,两者对系统非线性的跟踪都较好;当初始天向失准角较大时,非线性程度加深,QKF 积分精度高于UKF,对系统非线性的跟踪要好于UKF.UKF 和QKF 虽然从原理上说都是用离散点逼近非线性模型,但UKF 相对于QKF 来说,在非线性较强时,统计特性差,逼近或者拟合函数误差较大,文献[12]中证明了UKF 是稀疏网格QKF 的子集.
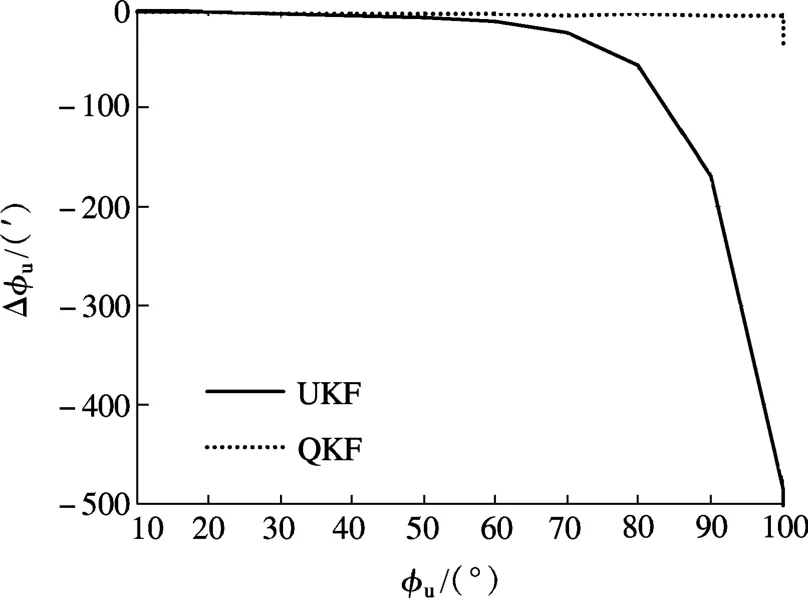
图2 UKF 与3 点QKF 天向失准角估计误差
为了说明单个分量Gauss 点配置数目对对准精度和速度的影响,分别选用3,5,7 个Gauss 点的QKF 进行仿真比较.为降低计算量,对滤波器进行降维处理,选用10 维状态量的前5 个作为状态量,将陀螺和加速度计的常值漂移放入噪声阵w 中,其他仿真条件不变.同样地,给出初始天向失准角为100°时的天向失准角估计误差和北向失准角估计误差曲线,分别如图3和图4所示.
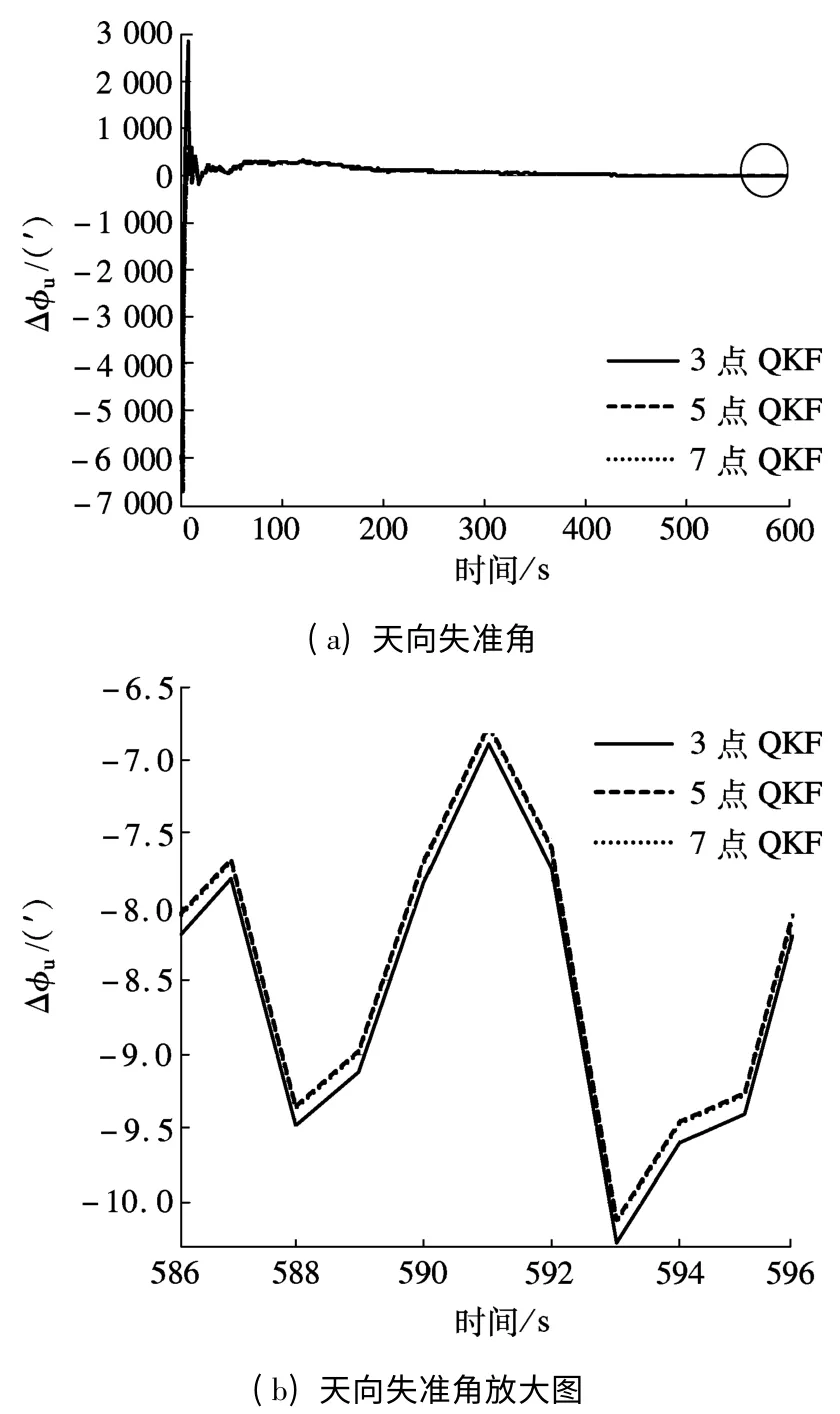
图3 不同点数QKF 天向失准角估计误差
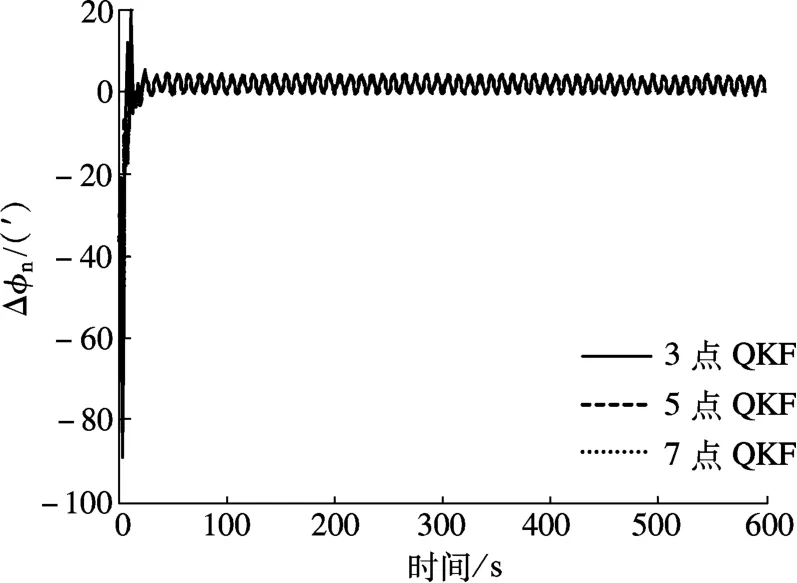
图4 不同点数QKF 北向失准角估计误差
图3(b)为图3(a)圈中部分放大图.图3表明3 点、5 点和7 点QKF 的天向失准角估计误差曲线非常接近,5 点和7 点QKF 曲线基本重合,从放大图中来看,其对准精度均要高于3 点QKF,但差别不大;三者收敛速度没有很大的差别.
图4中3 种点数的QKF 北向失准角估计误差均很小,三者曲线基本重合,3 点、5 点和7 点QKF中的Gauss 积分代数精度分别为5 阶、9 阶和13阶.仿真结果表明了在所设仿真条件下,虽然5 点、7 点QKF 的天向失准角估计精度高于3 点QKF,但其运算量增加很快,而大于5 点QKF 的精度和收敛速度差别不大,因此权衡计算量和对准精度,3点QKF 是较好的选择.
6 结语
本文采用Gauss-Hermite 求积分卡尔曼滤波方法对SINS 动基座下的大方位失准角初始对准进行了仿真研究.分析了Gauss 点和Gauss 系数的单变量配置及多变量配置方法,仿真分析表明:在相同仿真条件下,当初始天向失准角较大时,3 点QKF的天向失准角估计误差远小于比例对称的UKF,其估计收敛速度也快于UKF;而且随着单变量Gauss 点数的增加,QKF 对准精度会提高,但运算量也相应增大很多,需综合考虑对准性能和计算量.本方法的不足之处是运算量很大,滤波器的执行时间主要由Gauss 点的点数决定,尤其是状态维数较大时,其实用性会受到限制.文献[12]提出稀疏网格积分卡尔曼(SGQKF)可以大大减小多变量Gauss-Hermite 求积分的Gauss 点数,且有着与QKF相近的滤波精度,后续研究拟采用稀疏网格理论对多变量Gauss 点进行优化,将SGQKF 用于SINS 初始对准中.
References)
[1]Julier S,Uhlmann J,Durrant-Whyte H F.A new method for the nonlinear transformation of means and covariances in filters and estimators[J].IEEE Transactions on Automatic Control,2000,45(3):477-482.
[2]Zhou Benchuan,Cheng Xianghong.Robust UKF algorithm in SINS initial alignment[J].Journal of Southeast University:English Edition,2011,27(1):56-60.
[3]Arasaratnam I,Haykin S.Cubature Kalman filters[J].IEEE Transactions on Automatic Control,2009,54(6):1254-1269.
[4]郝燕玲,杨峻巍,陈亮,等.基于SRCKF 的水下航行器动基座初始对准技术[J].华中科技大学学报:自然科学版,2012,40(2):123-127.
Hao Yanling,Yang Junwei,Chen Liang,et al.Initial alignment method of the dynamic base for underwater vehicles using SRCKF[J].Journal of Huazhong University of Science and Technology:Natural Science Edition,2012,40(2):123-127.(in Chinese)
[5]Ito K,Xiong Kaiqi.Gaussian filters for nonlinear filtering problems[J].IEEE Transactions on Automatic Control,2000,45(5):910-927.
[6]巫春玲,韩崇昭.平方根求积分卡尔曼滤波器[J].电子学报,2009,37(5):987-992.
Wu Chunling,Han Chongzhao.Square-root quadrature Kalman filter[J].Acta Electronica Sinica,2009,37(5):987-992.(in Chinese)
[7]Arasaratnam I,Haykin S,Elliott R J.Discrete-time nonlinear filtering algorithms using Gauss-Hermite quadrature[J].Proceedings of the IEEE,2007,95(5):953-977.
[8]孙志忠,袁魏平,闻震初.数值分析[M].3 版.南京:东南大学出版社,2002:225-233.
[9]Fernandez-Prades C,Vila-Valls J.Bayesian nonlinear filtering using quadrature and cubature rules applied to sensor data fusion for positioning[C]//IEEE International Conference on Communications.Cape Town,South Africa,2010:1-5.
[10]Arasaratnam I,Haykin S.Square-root quadrature Kalman filtering[J].IEEE Transactions on Signal Processing,2008,56(6):2589-2593.
[11]严恭敏,严卫生,徐德民.简化UKF 滤波在SINS 大失准角初始对准中的应用[J].中国惯性技术学报,2008,16(3):253-264.
Yan Gongmin,Yan Weisheng,Xu Demin.Application of simplified UKF in SINS initial alignment for large misalignment angles[J].Journal of Chinese Inertial Technology,2008,16(3):253-264.(in Chinese)
[12]Jia Bin,Xin Ming,Cheng Yang.Sparse-grid quadrature nonlinear filtering[J].Automatica,2012,48(2):327-341.
