一种基于数字地形的雷达模拟器设计
2014-03-13
(91404部队,河北秦皇岛066001)
0 引言
计算机技术及仿真技术的飞速发展,使雷达系统仿真技术得到长足的进步,当前训练用雷达模拟器以其灵活性和低成本等优势在军事领域中得到了广泛的应用[1],国内外对训练手段和训练方式的研究表明,采用先进的技术进行模拟系统的研制,可以达到或接近实战中才能得到的训练效果,并达到真正的高效费比。
目前国内对雷达模拟器的研制,往往对地物杂波的处理采用位图及数据回放等方式进行,忽视了真实地形的影响。本文详细介绍一种基于数字地形的雷达模拟器的设计思想及其实现方法,该模拟器以产生与数字地形相匹配的雷达图像为目的,使模拟器训练达到实战的训练效果。该模拟器以纯软件化的方法实现,模块化设计,功能扩展便捷。
基于数字地形的雷达模拟器,主要的难点有两个方面,其一为地形材质信息的确定,其二考虑到数字地形数据的存储量往往以109为基本单位,存储量巨大,对于运动平台而言,如何快速地对地形数据进行调度,亦是仿真的难点之一。本文重点对上述问题进行了论述,并以某型雷达为背景,探讨了以战场环境和雷达仿真组网的模拟器的系统设计。
1 系统总体结构
模拟器总体结构由两台仿真主机构成,其中一台为仿真主控计算机,运行战场态势软件,完成对作战地形、目标、载机、气象等战场环境的设置及实时状态的控制;另一台为雷达仿真主机,运行雷达仿真运行程序,仿真雷达各种工作模式。软件构成雷达模拟器运行的框架,是设备运行的实体与管理者,雷达仿真主机接收来自战场态势仿真主机的各种态势信息,完成雷达的仿真。
模拟器运行之前需要一个预处理过程。雷达模拟器的预处理过程主要是为地形纹理指定材质信息及对OpenFlight数字地形数据库进行网格化处理,如图1所示。
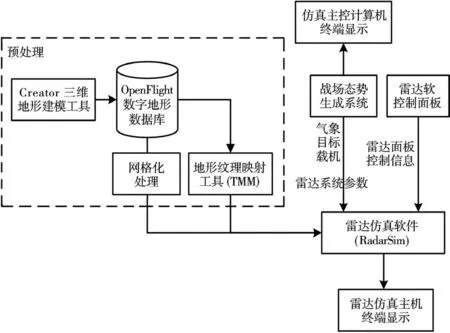
图1 模拟器系统总体结构
2 数据预处理
2.1 预处理过程
雷达模拟器的预处理过程主要包括两个工作:一是地形数据库的网格化处理,二是地形纹理的材质指定。通过地形数据的网格化处理和地形纹理材质指定两个过程,即利用新生成的雷达地形数据和雷达材质数据代替数字地形的相关数据。
2.2 地形数据的网格化处理
该雷达模拟器采用的是由Multigen-Paradigm公司提供的Open Flight格式地形数据库,其可实现对任意三维模型及姿态等信息的描述,其中包括对数字地形库的描述[2]。但是Open Flight地形数据库主体以三角面的形式提供了地形的离散顶点信息,三角面的形式方便了对地形高程信息的描述,但对于雷达模拟器仿真软件而言,增加了对离散采样点处理的难度。在模拟器设计中,提出了将地形数据库进行网格化处理的思想,即以一定的距离分辨率为基础将Open Flight地形库提供的顶点数据,进行二次处理,形成以正方形为基础的网格数据,预先确定各正方形网格顶点的高程信息,如图2所示。
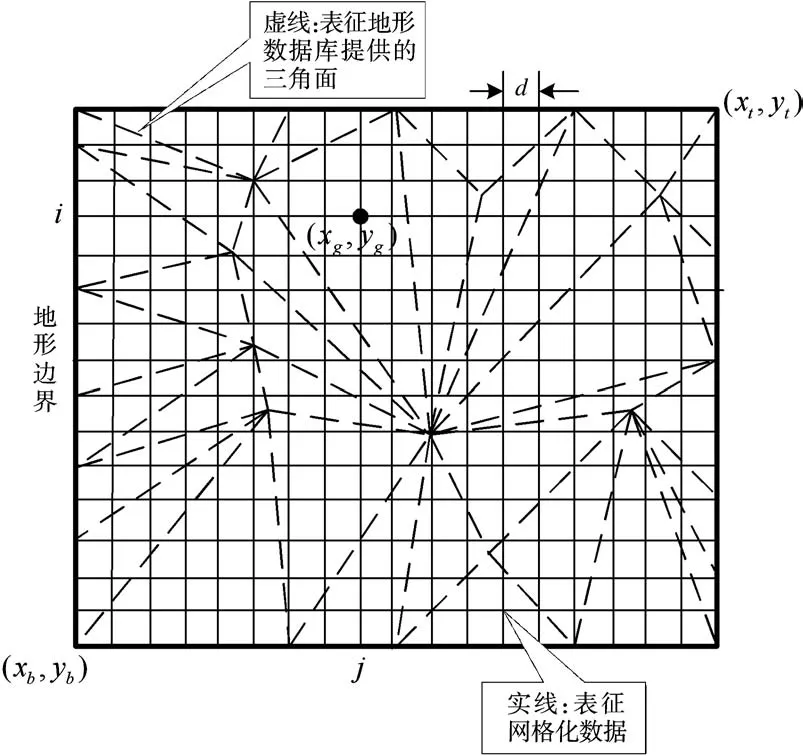
图2 OpenFlight地形数据网格化处理示意图
由图2可以看出,Open Flight地形数据库提供的地形数据以各三角形顶点作为地形数据的地理坐标,其三角形的组成复杂,无规律性,而以一定的距离分辨率为基础重建的网格化数据,可快速地定位网格顶点的地理坐标信息,大大降低了仿真运算时间。
同时利用网格化数据的特点,可针对雷达分辨率的不同实现地形数据的动态自适应。即当分辨单元不同于网格的采样间隔时,可基于插值算法对网格进行重组织,生成新采样间隔下的地形数据[3]。
2.3 地形纹理的材质指定
地形纹理的材质指定是一种将可见光的纹理图像转换为雷达可识别的材质图像的过程,是进行雷达图像仿真的前提和基础。
在Open Flight格式的地形数据中,地形的纹理数据一般采用rgb等图像格式进行存储,因此进行地形纹理到雷达材质转换的方法是在构建地形特征数据库的基础上,通过半自动的方式完成对可见光图像上的各种特征的确定,并形成与地形纹理对应的雷达材质数据库,其中雷达材质数据库以像素点为基础进行存储,实现流程如图3所示。
通常而言,对于大面积的地形其地形纹理的数据量也是非常惊人的,若采用人工的方式进行处理工作量将是非常巨大的。因此需要借助图像处理领域的边缘检测技术[4-6]对图像边缘进行自动识别,再由人工进行修改并完成材质指定。
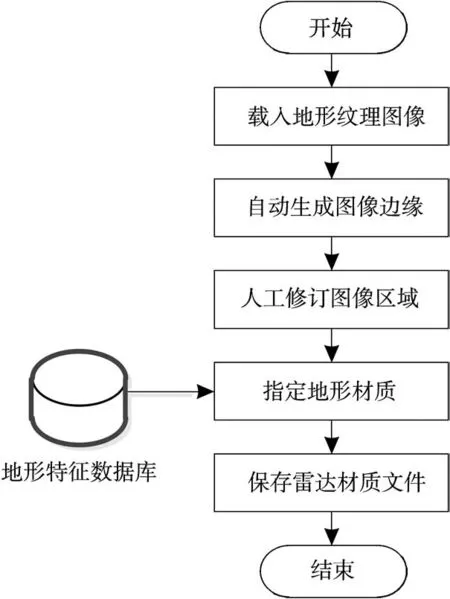
图3 地形纹理的材质指定处理流程
3 雷达仿真软件设计
某型雷达仿真软件系统总体结构如图4所示。

图4 雷达仿真软件设计结构
系统主要包括以下几个模块:
(1)自检模块
自检过程是雷达完成对自身硬件设备的检查过程。在仿真的过程中,自检主要实现两个方面的过程,一方面测试雷达仿真计算机与主控计算机间的网络状况,另一方面模拟了雷达所具有的开机自检和启动自检两个过程,实现了雷达自检画面。
(2)目标检测跟踪模块
检测跟踪模块作为雷达软件模块的一个重要组件,是整个软件运行的核心,亦是雷达功能的一个重要体现。检测跟踪模块主要利用目标检测仿真模型实现对运动目标的检测,在雷达操作员的操作和雷达功能的自身影响下,实现对目标的跟踪。
(3)地物回波生成模块
地物回波图像实现的基础是在雷达预处理阶段得到的雷达地形数据和雷达材质数据库,实时仿真时,采用功能级的雷达仿真方法,利用雷达方程进行地物回波强度的计算。首先,计算雷达照射的区域;其次,提取雷达照射区域下的雷达地形数据和雷达材质,计算雷达入射角,判断地形材质;然后,基于雷达平均散射截面积数据库(与频率、入射角、极化方式、地形材质相关)计算指定区域的雷达散射截面积;最后,计算地物回波强度和雷达灰度级转换[7]。
(4)气象回波生成模块
利用建立的气象模型,实现气象回波的模拟与显示。
(5)图像生成模块
图像生成模块主要完成雷达杂波图像、气象图像、目标图像和辅助图标的叠加和显示。雷达图像的生成主要利用Windows的DIB(设备无关位图)技术,其支持对像素点级的操作,可有效的对雷达图像的控制,实现图像的快速无屏闪的显示。在设计中,为了保证雷达图像的长余辉效果,主要利用了“双内存”的手段,将需要进行余辉处理的地物和目标图像与不需进行余辉处理的辅助图像分离,各自经相应处理后进行图像叠加,生成雷达图像。
(6)雷达工作状态控制模块
雷达工作状态的控制主要以键盘作为雷达操作员的控制面板,实现对雷达工作状态的切换,雷达系统仿真软件接收到雷达各热键信息后,对键值进行解释、分析,实现相应的雷达功能。
(7)配置文件调度模块
配置文件调度模块完成对软件所需的各种资源的加载与管理。
(8)网络信息交互模块
网络信息交互模块主要用于雷达仿真计算机与主控计算机间各种信息的交互,如载机信息、目标信息、气象信息、控制命令等。
考虑到系统的分布式规模较小,因此在设计中主要自主开发了基于TCP/IP协议的网络通信开发包,对网络通信数据主要分为信息流和事件流[8]两个方面,信息流指周期性发送和接收的数据,事件流指突发性的网络事件,考虑到事件流的特殊性,其只在特定的时刻产生,因此,网络数据传输中首要保证事件流的可靠达到,在开发包的设计中对事件流主要采用问答机制保证其可靠性,即当事件发出后,接收端在指定时间内对数据的到达进行回答。
(9)数据库访问模块
实现对Access目标散射截面积数据库的访问。
4 战场态势软件设计
战场态势软件在仿真主控计算机上运行,作为整个仿真系统的主控平台,是整个系统控制、管理、配置的中心,总体结构如图5所示。它可以划分为系统控制、战场环境初始化配置、目标运动模型解算、载机平台飞行状态控制、战场环境再配置、网络通信和数据库访问七个模块。
(1)系统控制模块
远程实现控制整个仿真系统的运行、暂停、终止。
(2)战场环境初始化配置模块
战场环境包括战场地形环境、气象环境、电磁环境、目标环境、雷达系统和载机平台等多个方面。通过战场环境初始化配置模块可实现对上述各种条件的设置,形成rax格式的配置文件,供雷达仿真软件调用。
(3)目标运动模型解算模块
由初始化配置模块设定的目标,具有一定的运动属性及状态,在仿真进行中,目标以其初始设定的状态进行运动,目标运动解算模块则依据其设定的运动的属性,实时解算目标状态及位置信息。
(4)载机平台飞行状态控制模块
仿真进行中,载机平台的不断运动,形成了雷达平台位置的不断变换,仿真软件设计中,以软件化方式实现了对载机状态的控制,同时解算载机新的位置及状态。
(5)战场环境再配置模块
战场环境经过初始化设置后,考虑到后期的作战任务的需要,需要实时地对战场环境进行修改更新。通过战场环境再配置模块可以完成对目标和气象信息的添加、更新及删除,雷达系统参数的更新等功能,实现了操作员对整个仿真作战环境的实时控制。
(6)网络通信模块
网络通信模块是实现主控计算机与雷达仿真计算机通信的主要手段。通信主要包括两个方面,一方面是主控计算机与雷达仿真主机的“握手”信号的建立,在确定握手信号正常建立后,方可进行继续的仿真过程,另一方面是主控计算机与雷达仿真主机的信息交互,包括载机状态信息、目标状态信息、雷达系统参数信息和气象信息等几个方面,这些信息的交互均以结构体的形式实现。
(7)数据库访问模块
数据库访问模块提供高效的数据库连接、访问、修改服务,实现对平台库和装备库数据的访问。
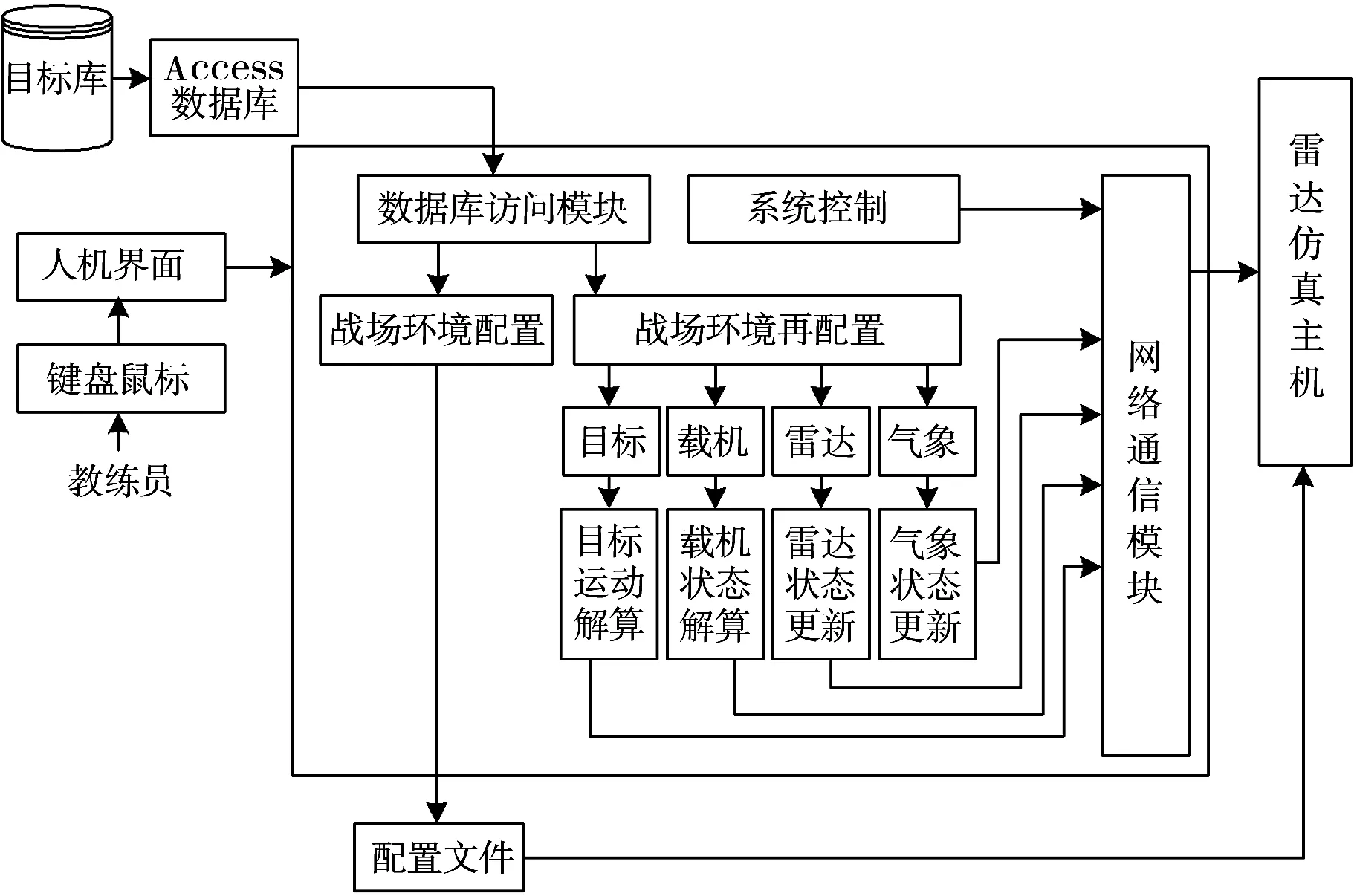
图5 战场态势软件结构
5 仿真结果
图6为某型雷达仿真效果图,距离分辨率为30 m,波束宽度为1°,频率X波段,极化方式VV,增益为50 dB。
6 结束语
本雷达模拟器采用软件化方法对雷达的模拟,突破了以前雷达模拟器必须采用硬件或软硬相结合的约束,大大减少了模拟器的开发成本,提高了模拟器功能扩展能力。通过仿真表明该模拟器的设计切实可行,模拟的雷达图像实时性好,逼真度高,具有较高的工程应用价值。
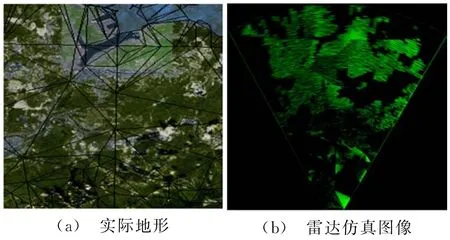
图6 某型雷达仿真图像
[1]MITCHELL R L.雷达系统模拟[M].北京:科技出版社,1976:1-2.
[2]Multigen-Paradigm Corporation.OpenFlight API User’s Guide[M].U.S.A:Multigen-Paradigm Corporation,2003.
[3]KRUGLINSKI D J,WINGO S,SHEPERD G W.Programming with Microsoft Visual C++[M].北京:清华大学出版社,2004:101-111.
[4]章毓晋.图像工程(中册)-图像分析[M].北京:清华大学出版社,2005.
[5]葛宏立.面向类的图像分割方法研究[D].北京:北京林业大学,2004.
[6]张翠萍,杨善超.基于K-均值聚类算法的中药叶片显微图像分割[J].石河子大学学报(自然科学版),2009,27(3):383-387.
[7]陈建军,邱伟,黄孟俊,等.基于距离单元筛选的扩展目标检测新方法[J].雷达科学与技术,2012,10(3):294-300.
[8]黄晓冬,何友,徐俊艳.一种基于HLA的弹性软件框架及其应用[J].系统仿真学报,2005,17(1):95-99.
