基于微振动隔离技术的平台载荷一体化设计
2014-03-12申军烽邓成晨陶炯鸣周徐斌倪涛
申军烽 邓成晨 陶炯鸣 周徐斌 倪涛
(上海卫星工程研究所,上海200240)
0 引言
随着高分辨率光学遥感卫星的不断发展,有效载荷(例如相机)的体积、质量不断增长。目前常见的大口径相机的口径在3m以上,高度在4m以上,质量超过1 000kg。如果与卫星平台仍然按照传统的安装形式进行简单的组合安装,那么整个系统的尺寸包络将严重超出火箭整流罩的要求,因此,卫星平台与载荷之间的支撑结构设计显得尤为重要。
针对大口径空间遥感器独特的结构设计需求,国内外开展了大量的研究工作,包括遥感器内部的支撑设计[1]、遥感器与平台的一体化结构设计等。平台载荷一体化设计思想在国外应用较为成熟,一般是将载荷的一部分结构与卫星结构合二为一。载荷安装在平台上的方案有两种:一是载荷法兰面与卫星平台仪器舱安装板直接连接;二是卫星平台采用桁架式结构支撑载荷,例如法国 Geo-Oculus卫星与非洲GeoSat1卫星的设计思路[2]。
平台载荷一体化设计使卫星与载荷的系统结构更加紧凑,尺寸也大大降低。但是,这种设计会使载荷整体更加接近卫星平台的主要振源,例如飞轮[3-4]。因此,平台载荷一体化结构设计中,必须考虑卫星平台对载荷的振动影响问题[5]。本文将重点将从载荷微振动隔离的角度对平台载荷一体化结构的设计问题进行研究。
1 一体化结构刚度设计原理
微振动隔离关键点在于连接结构刚度的设计。需要关注的问题包括刚度的设计范围以及空间6自由度刚度的分布关系。为确保连接方式对光学基板不产生较大的影响,一体化结构连接点与有效载荷安装基板之间只能有六个约束。这六个约束可以用弹性元件(三个平移弹簧和三个扭转弹簧)来表示,如图1所示。图1中,Fdx,Fdy,Fdz分别是3个平动弹簧力;Frx,Fry,Frz分别是3个扭转弹簧力。每个弹性元件在其自身局部坐标系的刚度矩阵为ki(i=1,2,3,…,N)。由上述假设可知,N个弹性元件在其真实连接点处合成后的刚度与等价安装点的刚度一致,即合成后的刚度矩阵在等价安装点处为对角矩阵[6]。
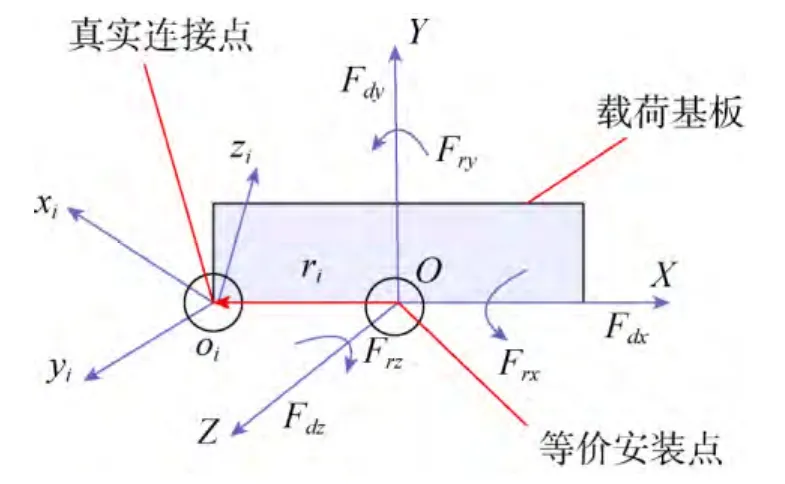
图1 弹性单元真实安装点与等价安装点Fig.1 Flexibility mounts and equivalent mounts
一般情况下,设等价安装点全局坐标系原点为O,坐标轴分别为X,Y和Z,真实连接点i处的局部坐标系原点为Oi,坐标轴分别为xi,yi和zi,从O到Oi的位置矢量为。则第i个弹性元件由局部坐标系的刚度矩阵ki变换为全局坐标系的刚度矩阵为
其中 Ki为连接点i在其局部坐标系内的刚度矩阵;Hi为从连接点i局部坐标系到参考坐标系的刚度变换矩阵[6]。
N个弹性元件合成后的连接刚度在全局坐标系的刚度矩阵为
在实际空间结构设计中,由于在轨期间有效载荷和平台需要保持一定的连接刚度,难以实现理想的连接刚度矩阵。若实际结构存在多余的约束,则连接结构刚度矩阵的非对角项元素不为零。刚度的耦合会给隔振性能带来较大的影响[7],通过对实际结构进行合理的刚度弱化,减小耦合项的影响。
判定一体化结构与载荷的解耦程度可利用能量法[8],依据各阶模态的参与程度判断。在星体坐标系中,根据平台载荷一体化结构系统的质量矩阵M和振型矩阵Ф,定义系统的能量分布矩阵。
在第j(j=1,2,3,…,6)个广义坐标(自由度)上分配到的能量Tj为

其中 ωj为一体化结构第j阶振动的固有频率(j=1,2,3,…,6);mkl为质量阵M的第k行、l列元素(k、l =1,2,3,…,6);φjl和φjk分别为振型Ф中第j阶振型φj的第l个元素和第k个元素。
第j个广义坐标(自由度)上分配的能量占系统总能量的百分比为Tpj
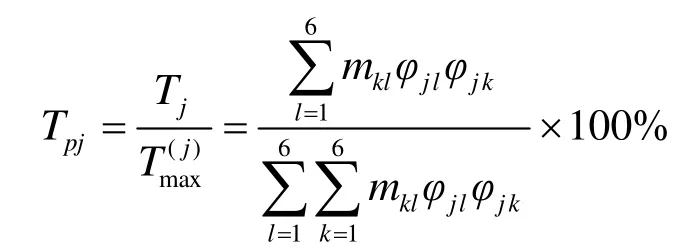
因此,在第j个广义坐标上,Tpj在各阶振动中的最大值即为自由度j上的振动解耦率。如果Tpj=100%,则表示系统作第j阶主振时能量全部集中在第j个自由度上,即这个自由度相对其它的自由度解耦。
2 一体化结构特性分析
采用刚柔混合建模的方法,建立卫星仿真模型,如图2所示。其中,卫星平台为弹性体、相机为刚性体。二者之间的连接为前文提到的一体化结构。建模的思路和过程可参考文献[9]。
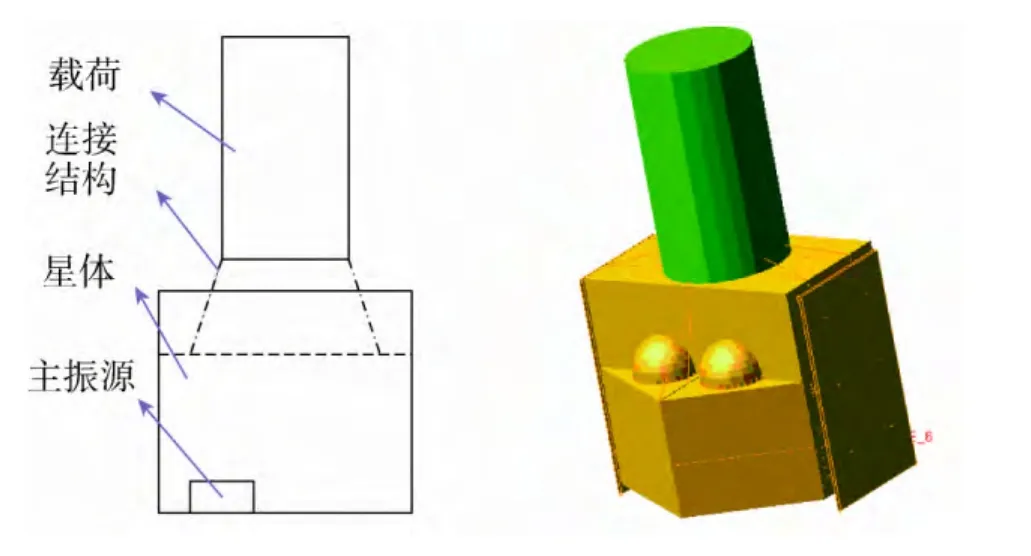
图2 整星结构示意及仿真模型Fig.2 Sketch of satellite composition and simulation model
通过有限元模型分析可知,卫星底板飞轮安装面上有局部共振频率,对应底板的共振位置,如图 3所示。因飞轮安装在这些位置上,引起剧烈振动。
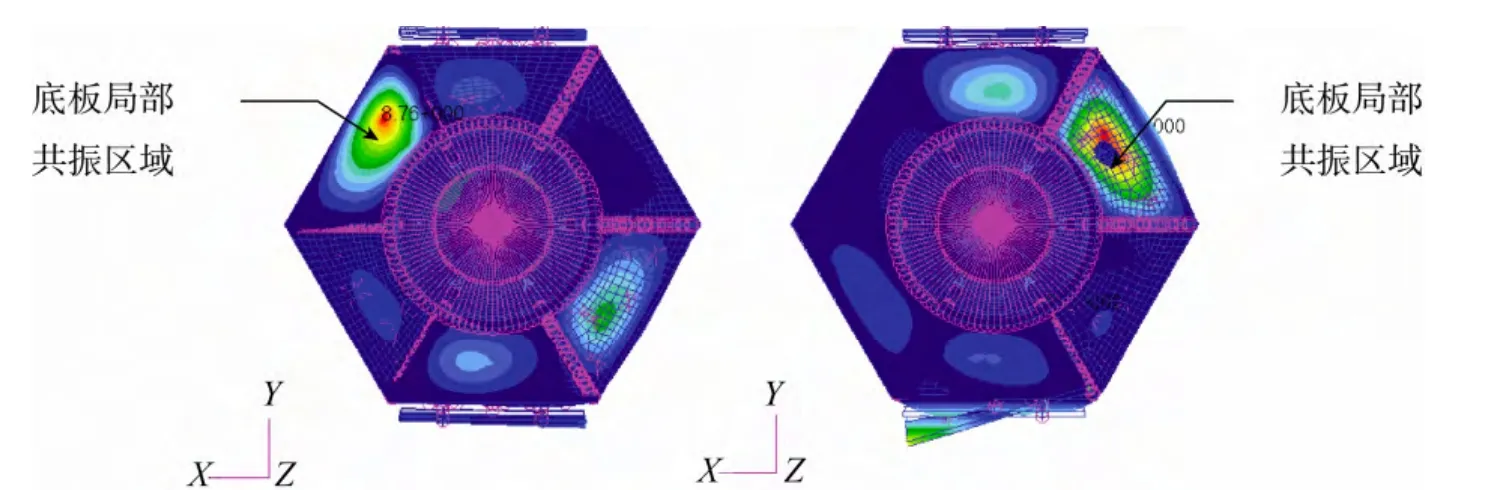
图3 卫星底板局部共振点Fig.3 Local resonance modal of satellite base
对整星进行模态分析,飞轮安装在底板的局部位置会引起剧烈振动,故选择最恶劣的工况进行分析。
工况1~6:飞轮1~6单独激励,飞轮转速分别为4 000、4 798、4 300、4 090、3 975、4 458 r/min。工况7:6个飞轮同时以其共振频率进行激励。工况8:6个飞轮同时以3 000 r/min的转速激励。其中,飞轮的分析输入条件为实测数据。
根据以上工况进行仿真,结果如表1所示。
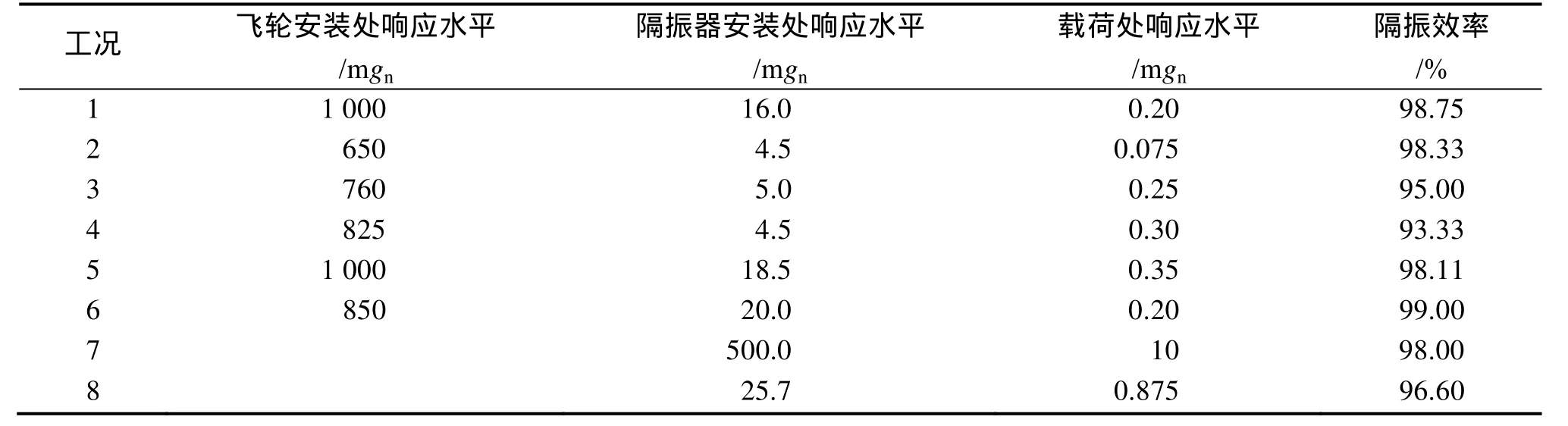
表1 各工况仿真结果Table 1 Simulation result of each working condition
可以看出:在不同工况下,一体化结构的隔振效率均在93%以上,且在所有飞轮均已最高转速激励模式下,隔振系统能够将振动响应抑制到1mgn以下,满足设计要求。
3 试验验证
限于条件,仅对一体化结构特性进行试验。采用卫星平台结构与有效载荷安装板之间的柔性连接对振动进行控制[10-13]。该验证方案由卫星平台结构、有效载荷安装平台、连接桁架结构、柔性连接单元等部分组成,如图4所示。

图4 平台载荷一体化结构示意及模型Fig.4 Sketch of integrated structure of platform and payload
有效载荷安装平台材料采用光学载荷安装基板常用的钛合金;卫星平台采用外接圆为正六边形结构,为了模拟平台结构变形,采用铝合金与45#钢的双层结构,厚度为30 mm;桁架采用碳纤维杆件M55J,直径80 mm,壁厚5 mm。
由于试验相同的柔性连接单元,各单元刚度矩阵ki(i=1,2,3,…,N)相同,具体结果为
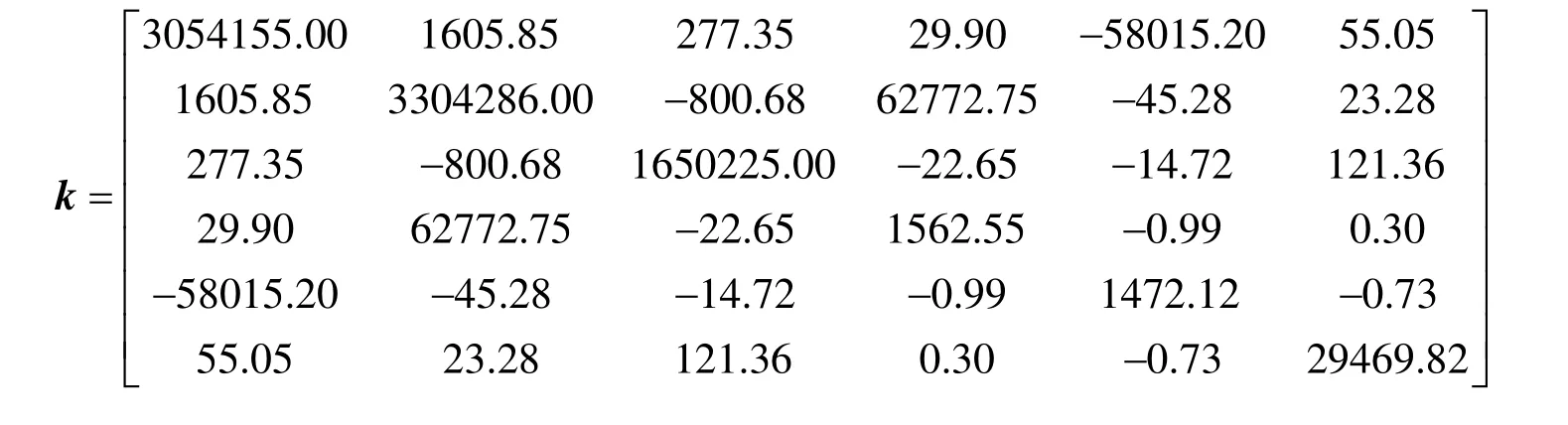
其中,前3列元素的单位为N/m,后3列元素的单位为N·m/(º)。
为考核上述平台载荷一体化结构设计的隔振性能,对平台载荷一体化结构进行系统级的性能试验。其中,星上振源由模拟振源系统替代,工作状态:0~2 700r/min;振源电机安装位置在结构平台;相机由模拟配重替代,同时,由低刚度悬吊系统悬吊配重,抵消重力影响。此时,模拟相机的基板与平台载荷一体化结构是通过柔性连接单元连接,如图5所示。
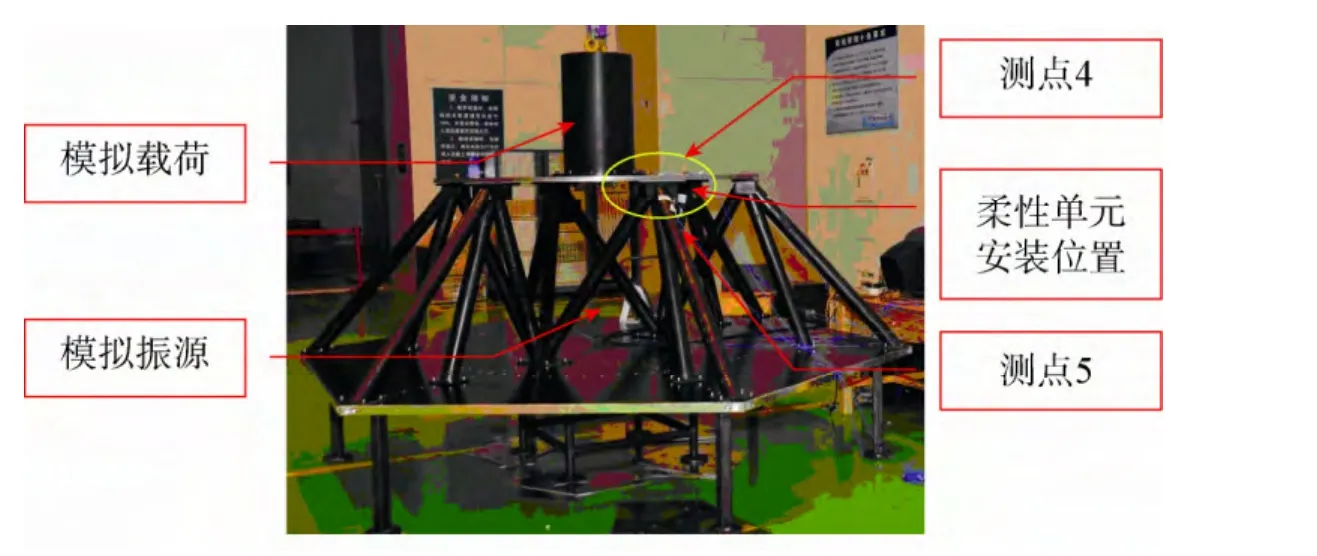
图5 平台载荷一体化结构试验现场Fig.5 Test of integrated structure of platform and payload
在此工况下,柔性连接单元上(测点4)下(测点5)两端三个方向的振动响应分别如图6所示,其中,幅值较小的曲线表示柔性连接单元下端测点4。


图6 测点4和测点5的振动响应Fig.6 Vibratory response of measured point 4 & 5
图6中Z向频域响应表明,在0~50Hz之间有两个异常的响应峰值,分别在38Hz和43Hz左右,其中 43Hz是载荷模拟基板自身的固有频率,不做考虑。建立平台载荷一体化结构和支撑工装的有限元模型,仿真分析表明:模态试验测得的 38Hz是蜂窝板或支撑工装的固有频率,在分析平台载荷一体化结构减振效果时应将其排除。因此,排除工频干扰、蜂窝板和支撑工装的局部模态影响,平台载荷一体化结构在15~50Hz内的减振效果在80%~90%之间,高频部分的减振效果也在90%左右。
4 结束语
本文提出的基于微振动隔离技术的平台载荷一体化设计在满足载荷安装包络要求的同时,还能够将卫星平台传递至载荷基板的振动响应衰减80%~90%以上,从而有效地确保载荷主要性能满足使用指标要求。本文的研究对于高分辨率卫星平台载荷一体化结构设计具有一定的参考意义。
References)
[1] 曾勇强, 傅丹鹰, 孙纪文, 等. 空间遥感器大口径反射镜支撑结构型式综述[J]. 航天返回与遥感, 2006, 27(2): 18-25. ZENG Yongqiang, FU Danying, SUN Jiwen, et al. Summary of Support Structure Patterns of Large Mirror for Space Remote Sensor[J]. Spacecraft Recovery & Remote Sensing, 2006, 27(2): 18-25. (in Chinese)
[2] Vaillon L, Schull U, Knigge T, et al. Geo-Oculus: High Resolution Multi-spectral Earth Imaging Mission from Geostationary Orbit[C]. International Conference on Space Optics, Rhodes, Greece, 4-8 October, 2010.
[3] Eyerman C E, Shea J F. A Systems Engineering Approach to Disturbance Minimization for Spacecraft Utilizing Controlled Structures Technology[R]. MIT SERC Report#2-90, Massachusetts Institute of Technology: MIT Space Engineering Research Center, 1990.
[4] Melody J W. Discrete-frequency and Broadband Reaction Wheel Disturbance Models[R]. Interoffice Memorandum 3411-95-200csi, La Canada Flintridge: Jet Propulsion Laboratory, 1995.
[5] 蔺宇辉, 李玲, 王春辉, 等. 某空间光学遥感器的振动抑制及装星应力卸载技术应用[J]. 航天返回与遥感, 2012, 33(1): 23-31. LIN Yuhui, LI Ling, WANG Chunhui, et al. Application of Vibration Suppression and Assembly Stress Unloading Technology for a Space Optical Remote Sensor[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(1): 23-31. (in Chinese)
[6] 申军烽, 周徐斌, 薛景赛, 等. 弹性元件刚度特性对隔振系统解耦度的影响分析[C]// 中国宇航学会飞行器总体专业委员会第12届学术研讨会文集. 吉林延吉: 中国宇航学会, 2012: 436-440. SHEN Junfeng, ZHOU Xubin, XUE Jingsai, et al. Analysis of Stiff Element Factors Effect on Decoupling of Vibration Isolation[C]// 12th Academic Seminar of Spacecraft System Engineering Committee, Chinese Society of Astronautics. Jilin, Yanji: Chinese Society of Astronautics, 2012: 436-440. (in Chinese)
[7] 申军烽, 杜胜, 周徐斌, 等. 高精度光学有效载荷微振动隔振系统设计与分析[C]// 2011年全国机械动力学学术大会论文集. 杭州:中国振动工程学会机械动力学专业委员会, 2011: 124-129. SHEN Junfeng, DU Sheng, ZHOU Xubin, et al. Design and Analysis of Vibration Isolation for High Resolution Optical Payloads[C]// Academic Seminar of 2011 Domestic Conference on Mechanical Dynamics. Hangzhou: Mechanical Dynamics Conference of Chinese Society for Vibration Engineering, 2011: 124-129. (in Chinese)
[8] 吕兆平. 能量法解耦在动力总成悬置系统优化设计中的运用[J]. 汽车工程, 2008, 30(6):523-526. LV Zhaoping. The Application of Energy Decoupling Technique to Powertrain Mounting System Optimization[J]. Automotive Engineering, 2008, 30(6): 523-526. (in Chinese)
[9] 蒋国伟, 周徐斌, 申军烽, 等. 卫星微振动虚拟仿真技术研究及应用[J]. 计算机测量与控制, 2011, 19(9): 2206-2209. JIANG Guowei, ZHOU Xubin, SHEN Junfeng, et al. Study and Application of Micro-vibration Simulation of Satellite[J]. Computer Measurements & Control, 2011, 19(9): 2206-2209. (in Chinese)
[10] Virginio Sannibale, Gerardo G O, William H F. A Sub-Hertz Vibration Isolation Platform for a Deep Space Optical Communication Transceiver[C]// Proc. of SPIE, 2009, 7199: 71990I.
[11] Pamplona T, Rossin C, Martin L, et al. Three Bipods Slicer Prototype: Tests and Finite Element Calculations[C]// Proc. of SPIE, 2008, 7018: 701828.
[12] Kunt C O, Johnston John, Bartoszyk Andrew, et al. Development and Sizing of the JWST Integrated Science Instrument Module (ISIM) Metering Structure[C]// Proc. of SPIE, 2006, 6273:627322.
[13] Rossin C, Grange R, Milliard B, et al. Semi-kinematic Mount of the FIREBALL Large Optics[C]// Proc. of SPIE, 2008, 7018: 70181Q.
