一种基于人工智能技术的卫星遥感载荷系统方案
2014-03-12吕红苏云陈晓丽李娜
吕红 苏云 陈晓丽 李娜
(1 北京空间机电研究所,北京 100094)
(2 北京航空航天大学仪器科学与光电工程学院,北京 100191)
0 引言
空间光学遥感器能够以不同的时空尺度提供多种地表信息,可直接用于对感兴趣目标的成像探测,是信息获取的重要手段。目前的对地遥感的工作模式主要有星下点推扫模式、敏捷成像模式和工程组网观测模式3种方式,这些工作模式主要有以下不足:1)需地面规划/引导成像,突发事件响应能力不足;2)目标针对性不强,下行数据量巨大而信息量有限;3)地面解译与信息提取、分发环节耗时较长,信息利用的时效性差。
针对以上问题,国内外相关机构已对智能化遥感载荷系统技术进行了研究。主要研究成果有:1)未来智能对地观测卫星系统(FIEOS)。FIEOS系统基于空间的架构,实现遥感器、数据处理器和通信系统动态在轨集成,为全球各类用户提供实时有效对地观测数据和满足各领域应用需求的智能对地观测系统[1-2]。2)自主科学飞船试验系统(ASE)。NASA的“地球观测一号”搭载了ASE,可使航天器能够自主地进行科学探测并自主响应。ASE系统包含:星上科学算法模块,可以进行对地观测和在轨的数据分析;CASPER模块,可以根据星上科学算法模块的结果制定或调整任务操作计划;执行系统,执行并监视 CASPER产生的计划,且能够对指令做出一定的调整以改善计划的执行和响应[3]。3)美国快速响应“战术星”TacSat-3。该星能够搜集和处理图像并通过已建立的通用数据链路和战场超高频装置下传资料文件、信息位置或完整的图像[4]。国内也对遥感活动的智能化问题开展了研究,提出了解决遥感数据处理自动化、智能化和实时化的方案:智能对地观测系统,提出的智能对地观测卫星系统采用多层卫星网络结构,按照星座形式组成传感器网络协同工作[5]。但目前国内尚未进行基于人工智能技术的卫星遥感载荷的智能化系统研究工作,该方面的研究处于空白状态。
本文将从目前传统遥感方式存在的问题出发,结合人工智能技术,对智能化卫星遥感载荷的总体方案及智能专家系统、智能执行系统的方案进行设计,并以河流流域观测为例,介绍智能卫星遥感载荷系统的工作过程。
1 基于人工智能技术的卫星遥感载荷方案
从广义上讲,一般认为用计算机模拟人的智能行为就属于人工智能的范畴[6]。遥感载荷系统在观测过程中,存在各种突发任务和随时变化的观测环境及观测对象,由人逐一分析考虑这些情况,工作量较大难以完成,通过人工智能实现遥感载荷工作的在轨自主决策处理,可以节省时间、保证观测任务的完成质量(Quality)、减少人员和设备数量、缩小系统开销,从而有效提高系统的工作效率。
1.1 卫星遥感载荷方案
卫星遥感载荷方案包括智能专家系统、智能执行系统和智能语义解译系统3大部分,如图1所示。其中智能专家系统由智能识别模块、智能决策模块及智能进化模块3部分组成。智能执行系统主要指新型遥感器,包括全场感知仪、变焦中/高分辨率成像仪和变光谱分辨率成像仪。智能语义解译系统主要是面对用户的无障碍交流。
智能专家系统是遥感器系统的大脑,通过智能识别模块对全场感知仪预探测得到的数据进行在轨分析,将图像中的几何特征与特征数据库中的特征进行比对,提取出目标特征并进行识别,判断目标的属性。智能决策模块判定目标价值并给出遥感器的最佳成像参数,用于指挥智能执行系统;智能执行系统接收智能专家系统的指令,驱动变焦中/高分辨率成像仪以及变光谱分辨率成像仪,对指定目标进行跟踪探测。同时智能专家系统的工作需要进行自评价与地面上行评价,通过对历史评价数据的分析,总结归纳出“数值化”的经验,用于指导下次专家系统工作,即智能进化模块。
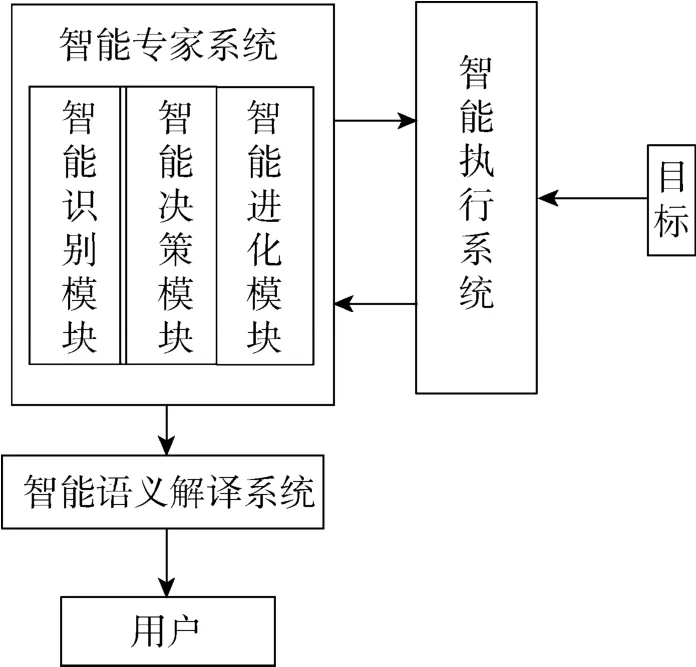
图1 智能卫星遥感载荷系统Fig.1 Intelligent satellite remote sensing payloads system
1.2 智能专家系统
1.2.1 智能识别模块
智能识别模块的作用是利用计算机信息处理手段自动分析图像信息,从而找到感兴趣的目标并确认目标类型。
智能识别模块分为图像目标区域捕获[7]、图像特征提取[8]和图像特征识别[9]3个环节。目标区域捕获环节将遥感图像中有价值的区域从大量的无用信息中提取出来,图像特征提取环节对于有价值的目标区域信息进行目标的特征提取,图像识别模块根据图形的几何及纹理等特征利用模式匹配、判别函数等识别理论对图像进行分类与描述,如图2所示。
1.2.2 智能决策模块
遥感器针对某个目标应采取哪种工作模式最优,参数设置是否最优等,是对目标价值评估和应激方案规划最优的系统问题,智能决策模块系统如图3所示。
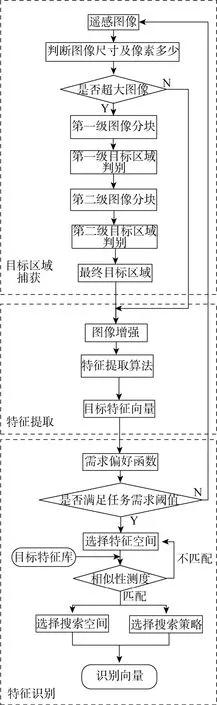
图2 智能识别模块Fig.2 Intelligent recognition module

图3 智能决策模块Fig.3 Intelligent decision-making module
在一幅遥感图像中,由于可能同时存在多个目标,其中有些目标是用户比较关注的,如机场和港口等,而另一些目标则可以忽略。这些目标的重要程度则可以用目标偏好函数来定量表示。首先,将目标捕获环节的输出,即识别向量,分别输入到目标偏好函数中,由系统判断哪些目标可以忽略,哪些目标需要继续跟踪。然后系统将重要的目标提取出来并检索案例库中的案例与之进行相似度的检测。将历史决策根据修改规则,参考当下环境进行修改,进而得到拟决策向量[10]。
对拟决策向量进行决策指标的提取,通过特定算法估算对应某个探测模式、指向、谱段组合规划方案是否满足目标阈值,若不满足则循环上述过程,重新进行模式规划,直到满足目标阈值,进入下一步的参数与路径应激规划系统。
参数与路径应激规划系统包括建立变化算法,并得到基于参数与路径偏好向量函数并引入基于参数与路径的应激成像仿真向量,通过特定算法循环参数与路径规划,得到最佳参数与路径组合[11]。最佳的模式、参数和路径规划方案作为最终星上应激决策向量,进入智能执行系统,并返回修正案例库。
1.2.3 智能进化模块
智能系统的一个主要特征是能够适应未知环境,其中学习能力是智能系统的关键技术之一。星上智能进化系统需要具备自我判断、自我学习和自我更新能力,智能进化模块如图4所示。其中,自我学习和自我更新是智能系统在星上形成决策并采取应激响应后得到的基于图像信息的反馈,进行自主判断某个决策和应激响应采取后取得的效果,如果达到系统默认阈值,即决策与响应正确,则将该决策和应激响应更新编入策略库,以便下次进行重访[12]。此种智能进化方案基于强化学习技术,是以环境反馈作为输入、适应环境的特殊学习方法。对于强化学习来讲,其目标是学习新环境下的一个应激策略。
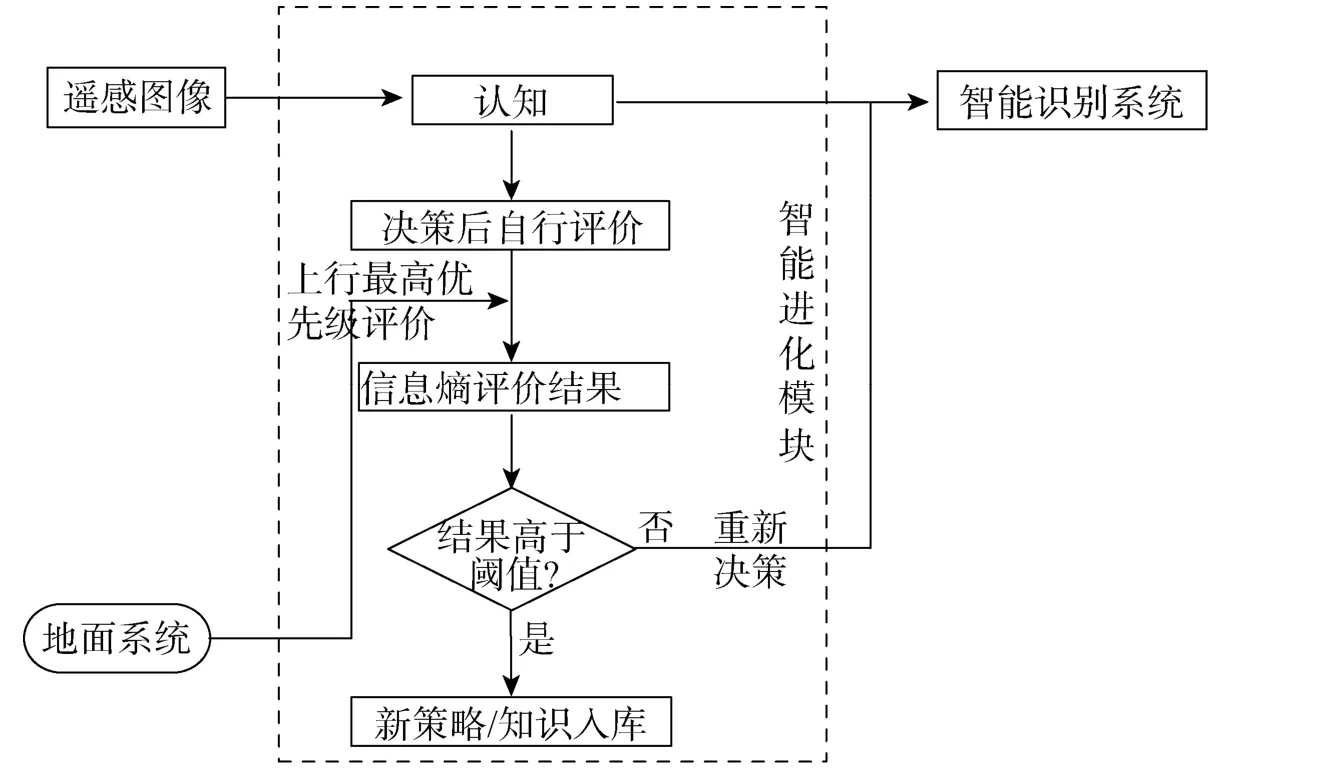
图4 智能进化模块Fig.4 Intelligent evolution module
1.3 智能执行系统
智能执行系统接收并执行智能专家系统的指令,完成成像任务。智能执行系统包括大区域低分辨率成像、局部中分辨率成像和重点目标高分辨率成像。其中低分辨率成像实现宽幅区域感知,自动定位目标区域;中分辨率成像实现对目标区域的中分辨率搜索及重点目标定位;高分辨率成像实现对重点目标的高光谱分辨率识别。
1.4 智能语义解译系统
智能语义解译系统是通过信息的在轨进行评估、图像融合与数据压缩完成图像的数据化过程,通过星上通信手段,以“点对点”的方式直接将简化的数据信息分发到用户的手持设备和指挥中心,为用户提供可视化的实时数据信息,提高突发事件感知能力[13]。
图像语义解译首先进行数据特点与特性分析,然后进行特征提取,并通过一一对应的映射关系,构建特征与语义之间的联系,生成语义内容与特征,最后根据语义内容与特征之间的关系进行学习与训练,建立基于知识的语义模型,最后得到利用语义表征的图像解译结果[14]。该方法能够有效提升不同特征之间的关联关系,为潜在知识的挖掘提供更多的关联概念,使得对目标地物的认识更加全面、准确,实现海量数据的有效信息挖掘以及智能解译。基于语义模型的智能语义解译过程如图5所示。

图5 智能语义解译过程Fig.5 Intelligen semantic interpretation process
2 智能卫星遥感载荷系统的工作过程
基于人工智能的卫星遥感载荷系统的目标识别、变焦调节、自动跟踪目标进行详查等智能化功能,将显著提高卫星的工作效率和时效性,最大限度地满足用户需求。本文将以河流流域观测为例,介绍智能卫星遥感载荷系统的工作过程,如图6所示。
首先,用户提出针对河流流域目标观测的需求,智能卫星遥感载荷系统接收用户指令,智能执行系统驱动全场感知仪进行大区域低分辨率的成像。智能专家系统接收智能执行系统的图像数据,通过智能识别模块对数据进行在轨分析。具体方法是基于均匀分块算法,将得到的遥感图像进行区域划分,通过特征提取算法逐步剔除其他信息,在各个区域“寻找”曲线特征;根据河流曲线的判定标准最终“锁定”目标—河流。智能决策模块根据目标特征向量对目标进行价值评估,并进入到星上决策系统,通过目标在图像中的矢量坐标反演得到光学系统指向变化信息,根据低分辨率图像信息对曝光量、分辨率以及探测模式进行分析,最终形成星上决策,并将指令发给智能执行系统,获得针对有价值目标的高分辨图像。智能进化模块通过自评价与地面上行评价总结本次任务执行结果的效果,归纳出“数值化”的经验并存储,可直接用于下次执行类似任务。智能语义解译系统对高分辨率图像中的信息进行语义解译,完成图像的数据化过程,通过星上通信手段,按需、及时地以“点对点”的方式直接将简化的数据信息分发到用户的手持设备和指挥中心,从情报处理、分发和利用过程全面提高时效性,为用户提供快速的近实时情报,提高突发事件感知能力,为指挥中心提供有效的天基信息支持。
3 中国智能遥感载荷系统的未来发展
中国智能化遥感载荷系统的研究仍处于起步阶段,技术不成熟,需借鉴国外先进智能遥感载荷系统技术。根据上述遥感载荷系统的功能需求,结合中国现有的技术水平,未来中国智能遥感载荷系统技术将重点向以下几个方面发展:
(1)发展遥感器自主参数、模式适应技术
未来智能遥感载荷需要针对不同的目标和环境,改变空间分辨率、谱段、方位指向以及曝光时间等,以获得最佳成像品质。这就需要着力发展中国遥感器自主参数、模式适应技术,使遥感器能根据当时所处的实际情况按需调整成像模式和成像参数,提高智能遥感载荷的成像针对性和工作效率。
(2)发展卫星自主任务规划技术
卫星自主任务规划技术可以充分利用卫星资源,需要对在什么时间、采用何种模式、对哪些目标实施观测进行规划,有效提高观测任务的针对性和时效性,是发展智能遥感载荷系统技术的关键环节,中国目前对于此项技术的研究停留在理论阶段,尚无成功的应用经验。对卫星资源进行合理安排、充分利用,以最大化满足用户需求,己成为中国发展智能遥感载荷系统技术迫切需要解决的问题。
(3)发展遥感图像在轨语义解译技术
遥感图像在轨解译技术从信息获取的源头完成数据量向信息量的转变,保证下行数据的有效性,提高突发事件感知能力,为指挥中心提供有效的天基信息支持。这是逐步实现智能化遥感载荷系统研究的重要技术基础之一。中国要早日实现遥感载荷系统的智能化设计,亟需突破遥感图像在轨语义解译技术。
4 结束语
基于人工智能技术的卫星遥感载荷系统成像方式与传统成像方式相比,有如下优势[15]:1)按需成像,针对性更强;2)低分辨率感知能力、高分辨率重点目标详查能力;3)减少下行数据量,降低卫星信息传输压力;4)信息利用时效性高;5)具备学习进化功能。
基于人工智能技术的卫星遥感载荷系统能够从数据获取的源头,对情报搜集、处理、分发以及应用整个链路进行系统化设计,提高信息的时效性和有用性,为用户按需、及时获取信息提供有效支持。可应用于大范围遥感成像、感兴趣目标的自动搜索、识别与定位、动静态目标跟踪与详查,拥有自主态势感知和情报处理能力,在在轨即时响应、突发事件的快速定位与解译、移动目标的快速捕获及跟踪等领域具有巨大的应用价值。
References)
[1] Zhou Guoqing, Kafatos Menas. Future Intelligent Earth Observing Satellites[C]. Pechora Land Satellite InformationIV/ISPRS Commission. I/FIEOS, 2002.
[2] 李德仁, 沈欣. 论智能化对地观测系[J]. 测绘科学, 2005, 30(4): 9-11. LI Deren, SHEN Xin. The Research of Intelligentize a Observation of Ground[J]. The Science of Topography, 2005, 30(4): 9-11. (in Chinese)
[3] US Department of Defense. Plan for Operationally Responsive Space[R]. A Report to Congressional Defense Committees, Washington: US Department of Defense, 2007.
[4] 庞之浩. 美国战术卫星系列试验卫星[J]. 国际航空, 2007(3): 2-3. PANG Zhihao. Test Satellite of Tactical Satellite Series[J]. International Aviation, 2007(3): 2-3.(in Chinese)
[5] Lemaitre M, Verfaillie G. Selecting and Scheduling Observations of Agile Satellites[J]. Aerospace Science and Technology, 2002(6): 367-381.
[6] 钟义信. 人工智能理论: 从分立到统一的奥秘[J]. 北京邮电大学学报, 2006, 29(3): 2-5. ZHONG Yixin. A Secret Making AI Theory: from Separation to Unification[J]. Journal of Beijing University of Posts and Telecommunications, 2006, 29(3): 2-5. (in Chinese)
[7] 杜培军, 郭达志, 周廷刚. 人工智能和专家系统在测绘科学中的应用[J]. 四川测绘, 2000, 23(1): 6-9. DU Peijun, GUO Dazhi, ZHOU Tinggang. The Application of Artificial Intelligence and Expert System in Topography[J]. Surveying and Mapping of Sichuan, 2000, 23(1): 6-9. (in Chinese)
[8] 戚义茹, 王国营. 基于目标区域的敏感图像特征提取[J]. 计算机工程与应用, 2006(23): 58-65. QI Yiru, WANG Guoying. Features Extraction of Sensitive Image on Object Area[J]. Computer Project and Application, 2006(23): 58-65. (in Chinese)
[9] 魏军伟. 遥感图像中港口目标检测研究与实现[D]. 西安: 西安电子科技大学, 2007. WEI Junwei. The Research of Harbor Detection in Remote Sensing Image[D]. Xi’an: Xi’an Electronic Science and Technology University, 2007. (in Chinese)
[10] Wolfe W J, Sorensen S E. Three Scheduling Algorithms Applied to the Earth Observing Systems Domain[J]. Mangement sciecne, 2000(46): 148-168.
[11] 苏云, 孙倩, 焦建超, 等. “智能眼”光学遥感载荷系统技术研究[C]. 第一届高分辨率对地观测学术研讨会. 北京, 2012. SU Yun, SUN Qian, JIAO Jianchao, et al. Study on the Advanced Remote Sensing Technology “Intelligent Eyes”[C]. The Proceedings of 1st Conference on High Resolution Earth Observation. Beijing, 2012. (in Chinese)
[12] Elnagar A, Gupta K. Motion Prediction of Moving Objects Based on Autoregressive Model[J]. IEEE Transactions on Systems, Man and Cybernetics, 1998, 28(6): 803-814.
[13] Oliva A, Torralba A. Building the Gist of a Scene: The Role of Global Image Features in Recognition[J]. Progress in Brain Research: Visual Perception, 2006(155): 23-26.
[14] Barnard K, Forsyth D A. Learning the Semantics of Words and Pictures[C]. Proc. Of ICCV, 2001: 408-415.
[15] 张兵. 智能遥感卫星系统[J]. 遥感学报, 2011, 15(3): 1-3. ZHANG Bing. Intelligent Remote Sensing Satellite System[J]. Journal of Remote Sensing, 2011, 15(3): 1-3. (in Chinese)
