一种新型充气式重力梯度杆的研制和在轨展开试验
2014-03-12曹旭王伟志张宏伟王永滨江长虹谭惠丰卫剑征
曹旭 王伟志 张宏伟 王永滨 江长虹 谭惠丰 卫剑征
(1 北京空间机电研究所,北京 100094)
(2 哈尔滨工业大学复合材料与结构研究所,哈尔滨 150080)
0 引言
重力梯度稳定作为卫星被动控制的一种,是利用卫星上离地球距离不同部位受到的引力不同而产生的力矩(重力梯度力矩)来进行卫星姿轨控的方式。采用这种控制方式的卫星质量特性需具备顶端具有哑铃状物体的长杆,而哑铃状的物体则应具备一定的质量(配重)。重力梯度稳定有控制方式简单、节约能源、可靠性高等优点,在小卫星控制中有很高的实用价值[1-2]。
重力梯度稳定的关键机构就是重力梯度杆,老式的重力梯度杆绝大部分是套筒式的刚性机构,直径逐级递减[3-4]。随着航天技术的发展,空间结构日趋大型化、复杂化,但运载火箭运载质量和有效载荷的储存空间是有限的,刚性重力梯度杆的质量、尺寸将受到很大限制。图1为前苏联早期的Nadezhda导航卫星,太阳电池阵近突出部分即为该卫星机械式重力梯度杆,可以看出其结构较为复杂、伸出长度有限。
而充气展开结构的摆放和折叠形式较为自由,占用发射空间较小;当其工作时,以充气方式可控展开,完全展开后利用材料刚化技术成为轻小型支撑结构。充气展开结构具有柔性可折叠包装、储存容积小、成本低、可在各种轨道上展开并刚化等特点,微流星和碎片的冲击、漏气以及其他环境威胁对充气结构的影响较小[5-6]。美国、俄罗斯、日本、欧空局等很多国家和组织正在开展相关研究,其中美国最早于20世纪60年代试验了“回声(Echo)”系列气球卫星[7-8],1994年5月,美国L’Garde进行的14m充气天线[9-10]空间试验则是充气展开结构应用领域的一个重大突破。除此之外,这种机构还可用于航天回收系统、充气式空间站、飞船应急逃生系统、月球基地等领域。
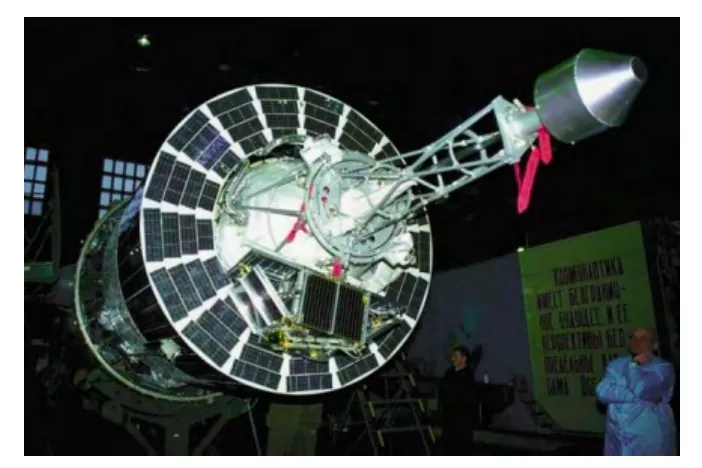
图1 前苏联Nadezhda导航卫星Fig. 1 CCCP navigation satellite“Nadezhda”
1 设计方案
1.1 研制过程简介
中国“新技术验证一号”卫星对新型航天器件、设备、材料、方法等进行在轨试验验证,基于卫星和空间充气展开结构的特点,创新地提出了一种新型充气式卫星重力梯度杆的搭载项目,它以充气伸展臂为主要结构形式既要作为卫星重力梯度杆又通过在轨试验验证空间充气展开结构的性能。
充气式重力梯度杆研制期间,攻克了充气伸展臂结构的诸多工程难题,如无磁刚化技术、可控充气展开技术、折叠包装技术以及地面性能试验等技术。在此基础上,北京空间机电研究所充分应用已有成熟技术,深入剖析充气式重力梯度杆的特点,攻克了充气展开结构产品总体设计和集成技术、伸展臂压紧释放技术、小型轻质低压充气装置设计技术、应用小型空间相机的试验监测技术、空间充气展开结构地面试验技术(模拟无重力和真空环境展开)等,实现了我国充气结构首次在轨试验。
1.2 功能和组成
充气式重力梯度杆可为微小卫星提供重力梯度力矩,主要功能包括:为卫星提供重力梯度稳定所需的转动惯量;展开前能够收拢在卫星内部狭小空间内,展开后可形成含端质量(配重块)的细长的重力梯度臂;质量和占用空间能够满足微小卫星的技术要求。
充气式重力梯度杆的主要部件包括:刚性结构(含2kg端质量块)、充气伸展臂结构、充气装置、拔销器、CMOS相机、配电盒。
充气伸展臂结构主要包括充气伸展臂、金属连接件等,是此次搭载试验的主要组成结构,长度3m,利用充气装置对其进行充气展开,展开后将顶端2kg端质量块带离卫星本体,实现重力梯度稳定的功能。
充气装置的功能是为伸展臂结构充气。
拔销器的功能是在充气伸展臂展开前(折叠包装状态)对其进行压紧,拔销器解锁后解除对充气伸展臂结构的约束,继而实现充气展开。
CMOS相机用于拍摄充气伸展臂在轨展开过程,通过图像数据评估重力梯度杆的在轨试验情况。配电盒对卫星提供的电源进行二次分配并转发相关指令功能。刚性结构的功能是为上述各装置提供安装平台并承受各种载荷。
1.3 工作程序
充气式重力梯度杆根据相应指令进行拔销器解锁和伸展臂充气展开。在轨试验过程中,CMOS相机获取展开过程以及展开后的图像并传回地面。充气式重力梯度杆展开前后卫星的情况如图2所示。

图2 充气式重力梯度杆折叠包装状态和展开状态示意Fig. 2 Packing and deploying dtatus of IGGB
1.4 主要性能指标
充气式重力梯度杆的设计长度(指伸展臂的长度)为3m,携带2kg的配重,除此之外还需要满足刚度、展开直线度、气密性、磁特性(需尽可能少地采用铁磁性材料)等要求,主要性能指标如表1所示。

表1 充气式重力梯度杆的主要指标Tab. 1 Main Performances of IGGB
1.5 充气伸展臂方案概述
充气伸展臂是实现卫星重力梯度稳定的关键部件,也是此次在轨充气展开试验的核心构件。
充气伸展臂的主要组成零件包括:内胆、外壁、增强条、尼龙搭扣、金属件等。其长度为3 000mm,在展开后可近似为悬臂梁模型,结构方案选用变直径薄壁圆柱管,与支座连接的固支3端直径为60mm,与端质量块连接的展开端的直径为50mm。伸展臂的主要尺寸如图3所示。

图3 充气伸展臂的主要尺寸Fig. 3 Main dimensions of inflatable boom
外壁为伸展臂提供足够的刚度,采用层合铝材料[11];内胆起阻止气体泄漏的作用,采用聚酰亚胺薄膜(Kapton);为满足一定的抗弯刚度和基频要求,在层合铝的内壁粘接了6条复合材料增强条,起到刚度增强的作用;为保证伸展臂可控稳定展开,在外壁外侧粘接了4条宽度尼龙搭扣。金属件主要包括上下端法兰、卡箍等,主要起连接固定的作用。
伸展臂的结构形式如图4所示。

图4 充气伸展臂管壁截面示意图Fig. 4 Section of inflatable boom
充气伸展臂的结构材料主要为柔性材料,增强条使用碳纤维铺层复合材料,利用纺织工业常用的尼龙搭扣来控制展开速度,使用这些材料可以保证伸展臂具有良好的柔性和较轻的质量。
充气伸展臂的外壁为自刚化材料,层合铝材料由柔软可延展的铝箔和Kapton层合而成,依靠充气时铝箔拉伸产生屈服硬化可完成材料的刚化,刚化不需要额外的能量,且对其进行充气展开后,便不再需要气体进行保压[12-13]。
充气伸展臂外壁材料的组成如图5所示。

图5 充气伸展臂外壁材料的组成示意Fig. 5 Materials of inflatable boom
2 关键技术
2.1 折叠包装技术
轨道环境下,重力梯度杆在微压下即可以膨胀展开,这可大大提高产品的可靠性,降低发射风险。但是如果展开过程得不到控制,充气展开结构将会对周围的设备产生干扰和不可挽回的破坏[14]。
Echo系列气球卫星的展开没有进行展开控制,它的展开仅仅靠折叠包装方法来决定。在超过32次发射任务中,早期有一些气球卫星在充气展开过程中失败了,部分就是因为缺少展开控制造成的。在对包装方法和充气程序进行改进后,后续发射的任务都取得了成功。
此外,伸展臂通过配重块与拔销器配合固定于刚性结构上,这就对伸展臂折叠包装后配重块的位置精度要求很高,伸展臂与拔销器的配合关系如图6所示。
根据以上要求,充气式重力梯度杆采用卷曲式折叠包装方式,经过多次折叠,确定了折叠包装后配重块的位置,以此确定了拔销器和刚性结构的形位,并将伸展臂的折叠包装工艺进行了固化,确保整机总装时能够顺利装配。充气伸展臂的折叠包装方式如图7所示。
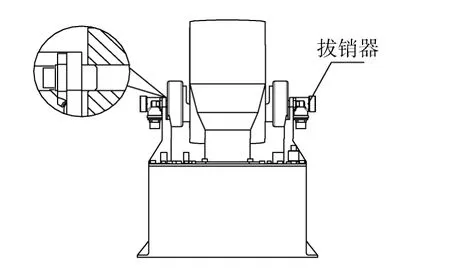
图6 充气伸展臂与拔销器的配合关系Fig. 6 Assembling of inflatable boom and piston actuator
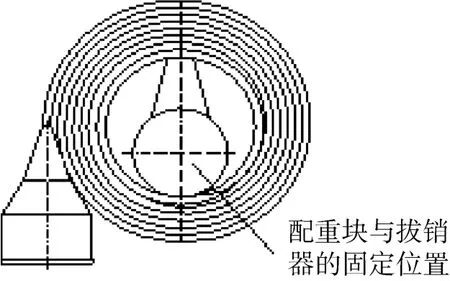
图7 充气伸展臂折叠包装方式Fig. 7 The folding pattern of inflatable boom
2.2 试验技术
由于针对空间应用,充气式重力梯度杆的充气展开过程无法直接在地面试验中验证,这是因为:1)充气装置采用绝压设计,且充气压力低,约12~35kPa,无法在大气环境下将伸展臂充满;2)伸展臂顶端携带了端质量,仅靠伸展臂自身刚度在地球重力场内无法承载配重块的重力。
为在地面试验中验证充气展开过程,在研制过程中构建了无重力展开吊架进行无重力展开试验,利用大型真空罐实现伸展臂真空充气展开。通过无重力展开试验和真空充气展开试验,摸索了充气式重力梯度杆的性能。
除此之外,在研制过程中还进行了力学环境试验、热环境试验、检漏试验、基频测试、磁通量测量等环境试验和测试,结果表明充气式重力梯度杆的性能可满足卫星运行环境要求。
2.2.1 真空充气展开试验
利用大型真空试验设备,为充气式重力梯度杆提供真空展开环境,在地面模拟在轨真空环境,以验证充气装置和充气伸展臂的性能。
由于无法在真空罐内实现无重力展开,试验中不携带端质量块或采用轻质端质量块来代替实际端质量。此外试验过程中还需要在真空罐内起爆火工品,因此对试验的安全性也提出了非常高的要求,实现难度很大。
经试验验证,充气式重力梯度杆在真空环境的展开时间为20~50s,试验取得了成功。
2.2.2 无重力展开试验
充气式重力梯度杆在轨展开的环境为微重力或无重力环境,且携带有2kg配重,而地面为重力环境,因此必须开展地面的无重力(消重力)试验来验证充气式重力梯度杆携带2kg配重时的展开性能。
试验的主要原理是通过一套专门设计的消重力装置抵消2kg配重,同时该装置不会影响试验过程中充气式重力梯度杆的充气展开。试验使用地面充气装置模拟在轨充气装置的质量流量。
试验验证了充气伸展臂展开时不会发生干涉,测定了充气伸展臂展开的晃动包络和展开直线度。
2.2.3 全序贯试验
除了上述两项综合试验,还进行了力学试验、检漏试验、热试验在内的环境试验,按照特定试验顺序经历所有环境后,充气式重力梯度杆充气展开。通过该试验可模拟充气式重力梯度杆从发射至在轨展开的力学、热学、真空和微重力环境,测定经历各种环境后充气装置的氦气泄漏率,验证在真空及微重力环境下重力梯度杆的工作过程和展开特性。由于各项试验的顺序是确定的,因此将该试验定名为全序贯试验。
在全序贯试验中,充气式重力梯度杆的真空展开数据如表2所示。
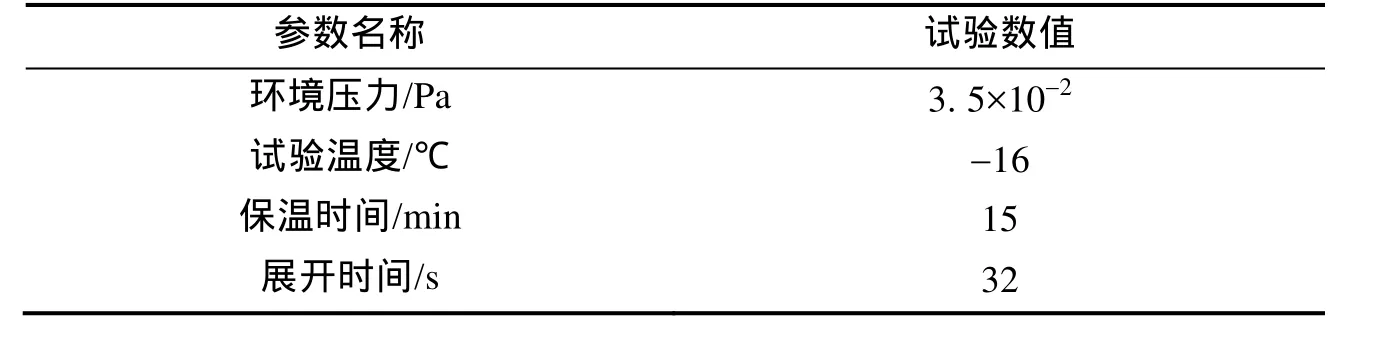
表2 真空展开试验数据Tab. 2 Data of IGGB vacuum deploying experiment
3 在轨展开试验情况
3.1 在轨展开试验结果的评判方法
充气式重力梯度杆通过在轨图像数据来评判试验结果。为第一时间直观、有效的获取充气伸展臂在轨展开的过程和最终状态,充气式重力梯度杆专门配备了1台小型CMOS监视相机,相机安装于充气式重力梯度杆底部的箱体内,充气伸展臂展开后可完全处于相机的视场中。
相机加电后即开始拍摄照片,在60s内连续拍摄10张照片,图像数据采用倒序传输,即首先传输最后一张照片,以便第一时间获取充气伸展臂的最终展开情况。CMOS相机的主要技术指标如下表3所示。
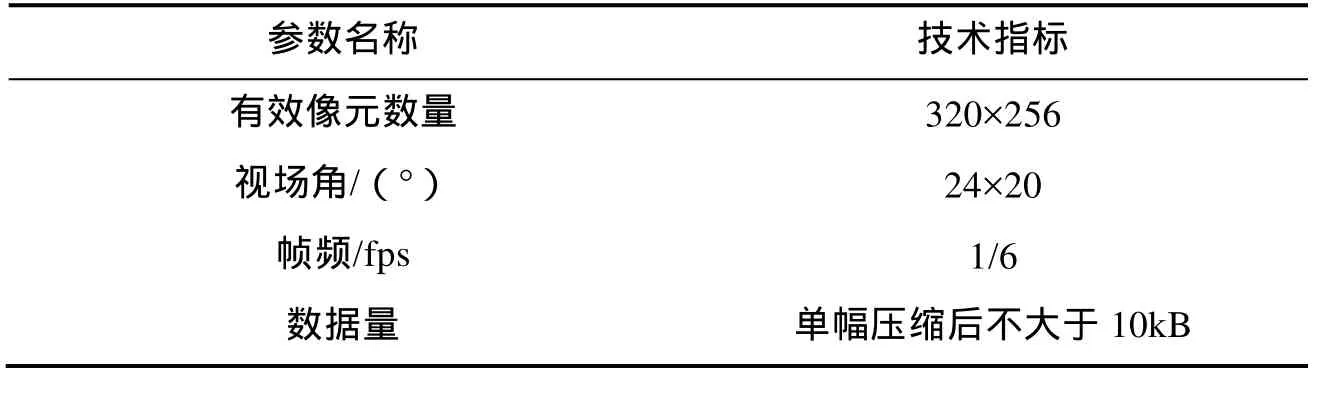
表3 CMOS监视相机的主要技术指标Tab. 3 Main performances of CMOS camera
3.2 试验光照条件介绍
光照是本次在轨展开试验的一个重要条件,只有当充气式重力梯度杆处于光照范围内,才能保证相机顺利获取到充气伸展臂展开过程的图像数据。在轨展开时,太阳光从充气式重力梯度杆一侧直射,如图8所示。虽然梯度杆在相机视场内的一侧不能全部被阳光照射到,但是,只要充气式重力梯度杆侧面有阳光照射,CMOS相机就可以保证阳光照到的部分能够清晰成像,可据此判断在轨试验的情况。
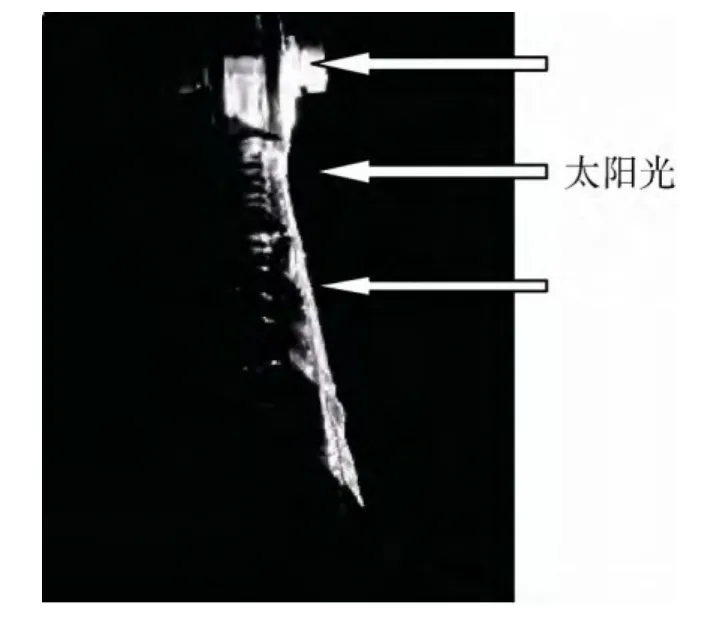
图8 在轨展开过程光照示意Fig. 8 Description of beam direction in IGGB deploying process in orbit
3.3 在轨试验结果
2013年5月28日晚6点17分,充气式重力梯度杆进行了在轨展开试验。按照试验流程,充气展开试验过程中卫星不进行姿态保持和控制。整个试验时长约1h,其中在轨展开约50s,图像数据下传约1h。充气式重力梯度杆完全展开后的照片如图9所示,根据图9及卫星姿轨控系统的遥测参数判断,试验取得了成功。

图9 充气式重力梯度杆在轨展开后的最终状态Fig. 9 Deploying status of IGGB in orbit
4 结束语
空间充气展开结构具有储存容积小、发射成本低、展开及刚化所需能量少等特点,利用空间充气展开结构技术,可以以较低的代价构建多种功能及结构形式的航天器结构,尤其是体积庞大的结构,如天线、太阳帆板、空间碎片防护结构、空间站舱段、行星居住舱、大型空间桁架结构、太空望远镜或相机镜头的遮光罩等[15-16]。
本文对“新技术验证一号”卫星搭载的充气式重力梯度杆的研制和在轨展开试验情况进行了介绍,通过展开后的照片可以直观判断在轨展开试验取得了圆满成功,这是我国充气展开结构技术第一次成功的在轨工程应用,标志着我国充气展开结构初步具备了工程化能力,直接验证了空间充气展开结构及配套装置(如压紧施放机构、供配电装置、充气装置)等的设计,为后续充气展开结构的其他在轨应用奠定了一定技术基础。
(
)
[1] 谭维炽, 胡金刚. 航天器系统工程[M]. 北京:中国科学技术出版社, 2009. TAN Weizhi, HU Jingang. Spacecraft System Engineering[M]. Beijing: CHINA Science and Technology Press, 2009 . (in Chinese)
[2] Ernest M, Maramba B S. A Numerical Analysis for Passive Attitude Stabilization Using a Tethered Balloon on a Gravity Gradient Satellite [R]. ADA435263, 2005.
[3] 于登云, 孙京, 马兴瑞. 大型构件伸展与锁(压)紧释放技术[J]. 航天器工程, 2006, 16(1):23-26. YU Dengyun, SUN Jing, MA Xingrui. Deployment and Hold-down and Release Mechanism of Large Space Component[J]. Spacecraft Engineering, 2006, 16(1):23-26. (in Chinese)
[4] 刘永光, 甘立刚. 伸缩可控的杆状空间伸展机构研究[J]. 机械工程师, 2007(1):33-35. LIU Yongguang, GAN Ligang. Design of Controllable Space Deploy-retract Mast[J]. Mechanical Engineer, 2007 (1): 33-35. (in Chinese)
[5] 沈祖炜, 唐明章. 空间结构展开与刚化[J]. 航天返回与遥感, 2005, 26(4):56-64. SHEN Zuwei, TANG Mingzhang. Deployment and Rigidity of Space Structures[J]. Space Recovery and Remote Sensing, 2005, 26(4): 56-64. (in Chinese)
[6] Cadogan, Grahne D, Mikulas M. Inflatable Space Structures - a New Paradigm for Space Structure Design[R]. IAF98-I102, 1998.
[7] Goddard Space Flight Center. Project Ultra-echo Final Report[R]. NASA-CR-91373 68N13105, 1967.
[8] Costa C, Mitch T. Inflatable Structures Technology Development Overview[R]. AIAA 95-3738, 1995.
[9] Thomas M, Williams G. Advances in Large Inflatable Reflectors[R]. NASA 90N19258, 1990.
[10] Freeland R E, Veal G R. Significance of the Inflatable Antenna Experiment technology[R]. AIAA 1998-2104, 1998.
[11] 曹旭, 王伟志. 空间充气展开结构的材料成型固化技术综述[J]. 航天返回与遥感, 2009, 30(4):63-68. CAO Xu, WANG Weizhi. Summary of Rigidization Technologies for Space Inflatable Structures[J]. Spacecraft Recovery and Remote Sensing, 2009, 30(4):63-68. (in Chinese)
[12] Tsunoda, Hiroaki. Deployment Method of Space Inflatable Structures Using Folding Crease Patterns[R]. AIAA 2003-1979, 2003.
[13] Cadogan, David P S. Rigidizable Materials for Use in Gossamer Space Inflatable Structures[R]. AIAA 2001-1417, 2001.
[14] Philley, Thomas L. Development, Fabrication and Ground Test of an Inflatable Structure Space-flight Experiment[R]. ADA413193, 2003.
[15] 王伟志. 太阳帆技术综述[J]. 航天返回与遥感, 2007, 28(2):1-4, 48.WANG Weizhi. The Summary of the Solar Sails’ Deployment Technology[J]. Spacecraft Recovery and Remote Sensing, 2007, 28(2):1-4, 48. (in Chinese)
[16] 徐彦, 关富玲. 新型充气展开遮光罩设计方案研究和仿真分析[J]. 航天返回与遥感, 2011, 32(2):55-63. XU Yan, GUAN Fuling. The Design and Simulation Research of New Inflatable Sunshield Structure[J]. Spacecraft Recovery and Remote Sensing, 2011, 32(2):55-63. (in Chinese)
