适用于粉尘环境的大量程高精度声频料位仪设计
2014-03-10陶德志王莉
陶德志 王莉
(第七一五研究所,杭州,310023)
适用于粉尘环境的大量程高精度声频料位仪设计
陶德志 王莉
(第七一五研究所,杭州,310023)
采用较低频率的声波作为测距手段,用APFFT算法对测距结果进行修正,提高了低频声波的测距精度,克服了超声波料位仪无法应用于粉尘环境的弊端,同时测距精度仍可以达到超声波料位仪的水平,拓展了声波料位仪在特殊粉尘环境下的应用范畴。
APFFT相位补偿;FFT频谱能量鉴别;功率自适应;温度补偿;粉尘
随着工业自动化及物联网技术的快速发展,制造业对工业生产各个环节的信息化要求越来越高,同时也对关键生产信息的自动采集和监控提出了更高的要求。例如粉尘环境下的料位监控就是一个技术难题,因为常用的雷达、激光以及超声波等测距手段的粉尘穿透能力都很弱,无法透过粉尘测量出其下的料位信息[1]。粉尘环境条件下,利用声频信号作为检测手段是一种新的思路。声频料位仪采用较低频率的声波作为测距手段,声波频率低、波长长[2],故而声波在空气中衰减慢,粉尘穿透能力强,适合于在长距离粉尘条件下工作。但由于波长长,导致测距精度的降低。本文旨在研究提高声波料位仪测距精度算法,该仪器在国内尚处于空白阶段。
1 工作原理
声频料位仪由电路部分、音头和号筒组成,其工作原理示意图见图1,探头固定安装在料仓上方并正对物料。音头发射出单频声波,经由号筒向正前方辐射出去,声波穿透粉尘并在物料面发生反射,音头接收到反射声波并将声信号转换为电信号。微弱电信号经过放大滤波和数字信号处理后得到声波的渡越时间,渡越时间乘声速即可算出音头到物料面的距离。其中声速需要根据实时的温度进行修正,否则将会造成较大的测距误差。公式(1)为空气中声速的温度修正公式[3],c为声速,单位m/s;t为温度,℃。设测距距离为D,音头至料仓底部的距离L,L减去D即得到料仓内的料位H。

2 系统硬件组成
系统硬件组成如图2所示。包括集成AD和DA模块的MCU,外部SRAM,数字温度传感器,数字电位器,RC滤波电路,功放电路,信号隔离电路,滤波放大电路以及负责电声和声电转换的音头号筒。

图1 声频料位仪示意图
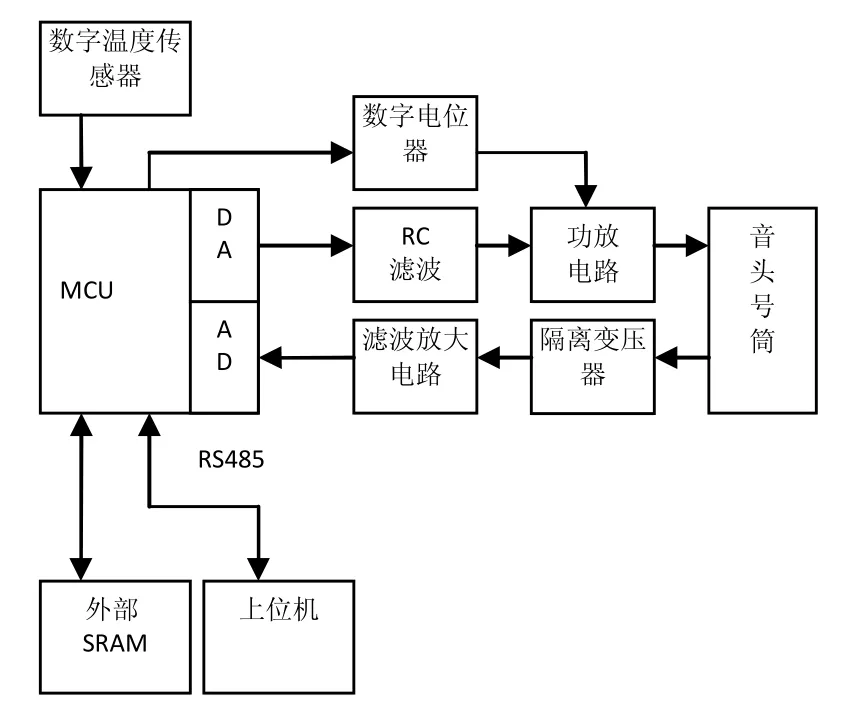
图2 系统硬件组成示意图
3 系统工作流程设计
如图3所示,声频料位仪加电后首先初始化UCOS系统的任务和堆栈并配置外置SRAM存储器以供AD采样数据存储之用;然后生成正弦包络调制的3 kHz单频调幅波的数据表以供信号发射之用;调整控制功放功率的数字电位器至最小,使发射功率处于最小档。

图3 声波料位仪系统流程图
初始化完毕后系统进入测距工作周期,以最小功率驱动音头号筒发出单频调幅波。声波经过指数型号筒后形成高指向性的近似平面波向号筒前方辐射出去,声波在向前传播的过程中遇到被测物体则被反射回来以相同的路径传回音头号筒。
音头接收到反射回波将其转变为微弱电信号,经由隔离变压器送入第一级前放电路。前放电路将音头传来的微弱信号进行一定幅度的放大,以使信号幅值满足模拟滤波处理要求。前放放大后的信号送入4阶带通滤波电路,经过带通电路后音头接收到的带外噪声将被大大衰减,为后续数字信号处理程序提供满足要求的信号。带通滤波后的信号送入后级放大电路,将信号放大至合适AD采样的幅值。后级放大信号送入跟随器以使信号更好的匹配AD的阻抗,跟随器将经过滤波放大的回波信号送入AD进行采样。
待音头盲区过后[4],AD以15 kHz的采样率对滤波放大后的信号进行采样,并将采样数据存入外部SRAM以供后续数字信号处理之用,采样时间持续0.6 s以使AD可以记录到最远100 m处的回波信号。
AD采样完毕进入数字信号处理运算周期,首先判断接收回波的幅值和能量是否小于门限的下限,小于门限则说明回波幅值过小信号的信噪比偏低将导致运算结果误差偏大或者无法算出正确的结果,系统自动调整控制功放增益的数字电位器,增大功放的功率,直至回波幅值大于门限下限。
判断接收回波的幅值和能量是否大于门限的上限,大于门限则说明回波幅值过大信号的AD采样值出现削峰限幅将导致无法算出回波峰值所处的确切位置,系统自动调整控制功放增益的数字电位器,减小功放的功率,直至回波幅值小于门限上限。
经过发射功率自动调整后回波信号的幅值满足后续信号处理的要求,对回波信号做FFT频谱能量分析[5],如果频谱能量的峰值不处于3 kHz的位置则说明该回波信号为干扰信号,该组信号不予取信,弃之不用。经过滤波放大后的实际回波信号如图4所示。

图4 实际回波示意图
能量峰值处于3 kHz的位置说明该信号为真实回波信号,首先对该组信号进行数字滤波[6]以滤除奇异点并进一步降低带外噪声提高数字信号的信噪比。然后利用最大似然法则找到回波峰值所处的采样点,根据该点的位置计算出声波传播的时间。再根据温度传感器采集的温度信息计算出当前空气中的声速,由传播时间和声速计算出距离。
最后通过APFFT算法[7]计算出回波峰值处采样点的无偏相位信息,根据该点相位确定回波峰值的真实位置对测距结果进行修正。某批数据的APFFT处理结果如图5所示,频谱能量的峰值为3 kHz,峰值位置的相位为59.7°。
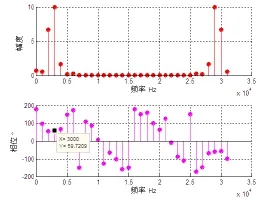
图5 实际回波APFFT幅度谱和相位谱示意图
声频料位实际系统试验表明:在选用3 kHz较低频声波为发射波的条件下,该方案可使测距精度达到毫米级,大幅提高了低频声波测距的精度。修正后的距离分辨率为0.002268 m较之无修正的测距分辨率0.0227 m提高了一个数量级。
4 结束语
本声频料位仪具有发射功率自适应调节、声速自动补偿、真假回波信号自动鉴别、测距量程远、测距精度高等特点,并且可以应用于其他测距方案无法工作的粉尘环境中。对回波信号进行APFFT算法的处理,修正后的测距精度达到毫米级,从而实现运用低频声波实现高精度测距。该声频料位仪的优点是检测距离远、粉尘影响小、造价低、可靠性高、安全、寿命长、安装维护方便,是一款有实际市场意义的产品。本声频料位仪可在水泥制造、食品加工、化工生产等粉尘环境下料仓料位的测量方面可以发挥无可替代的作用,填补了粉尘环境下物料监控领域信息化需求的技术空白。
[1]冯诺.超声手册[M].南京: 南京大学出版社,1999.
[2]何祚墉.声学理论基础[M].北京: 国防工业出版社,1981.
[3]马大猷.声学手册[M].北京: 科学出版社,2004.
[4]陶德志,王莉.超声波明渠流量计的设计[J].声学与电子工程,2011,(1):46-48.
[5]A V 奥本海姆.离散时间信号处理[M].西安: 西安交通大学出版社,2001.
[6]丁玉美,高西全.数字信号处理[M].西安: 西安电子科技大学出版社,2000.
[7]王兆华,黄翔东.数字信号全相位谱分析与滤波技术[M].北京: 电子工业出版社,2009.
