有效应答信号个数对定位精度的影响分析
2014-03-10覃雷
覃雷
(第七一五研究所,杭州,310023)
有效应答信号个数对定位精度的影响分析
覃雷
(第七一五研究所,杭州,310023)
长基线定位时一般会在水底布放4只应答器。由于受到环境因素的干扰,AUV在一个定位周期内接收到的应答信号有效个数会有所不同。通过仿真和海试数据分析了应答信号有效个数对定位精度的影响,通过仿真分析和海试数据分析可知:2只应答器定位是可行的,在2只应答器定位的高精度区,定位精度高,有些地方定位精度甚至优于3只应答器定位和4只应答器定位。
长基线;球面交汇;双应答器;定位精度
长基线系统的基线长度为几百米到几千米,声基线阵庞大,布放、回收、使用和维护较困难,但系统无需做大量的校准工作,并且在较大的范围内可以达到较高的定位精度。因此在需要长距离、高精度的水下航行器的定位导航应用领域中,长基线系统相比于超短基线系统和短基线系统就显示出了其技术优势[1]。
长基线水下定位导航系统的主要任务是为水下航行器提供实时定位、跟踪和导航[2]。当长基线布放在深海时,由于声波传播速度的限制,长基线的工作周期一般达到几秒至十几秒。对于某一定位周期,基于声信号检测的长基线定位系统受到环境因素的干扰[3],应答信号的有效个数会受到影响,为了满足高精度以及高稳定性的要求,我们要对应答信号有效个数对定位精度的影响进行分析。
1 基本理论
1.1 球面交汇定位原理
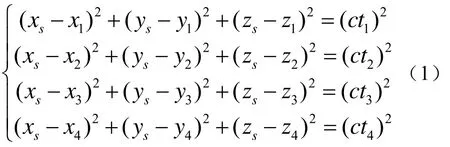
当接收到四只应答器时延,通过球面交汇构建方程组,通过求解方程组可实现AUV对自身的定位[4]。其基本思想是:距离=单程时延×声速。
设海底应答器坐标为(xi,yi,zi),i=1,2,3,4,AUV的位置坐标为(xs,ys,zs),设c为水下声速,ti为i号声信标与水下航行器之间的单程传播时延。根据几何位置关系,有如下方程组:
AUV深度可以通过压力传感器来获得,方程组(1)经过降次处理,得到二元一次方程组:
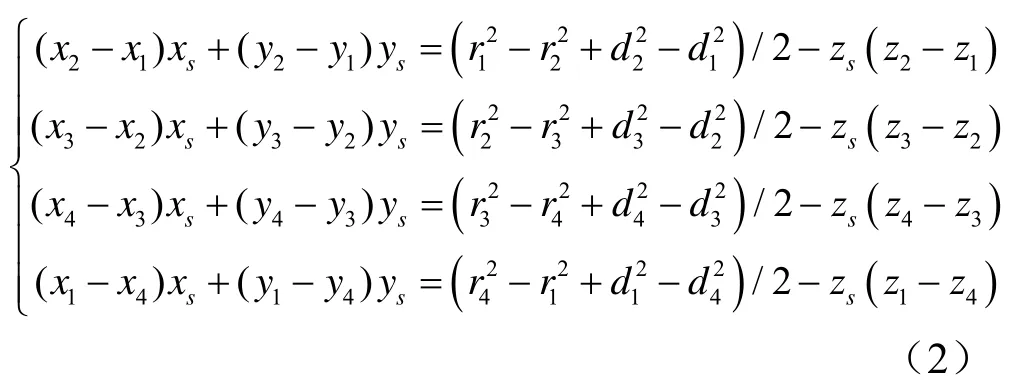
式中ri=cti,,i=1,2,3,4。
写成矩阵形式为

当矩阵MTM为可逆阵时,根据最小二乘法[5],可得到最优解为:

当接收到两只应答器时延,解算方法与接收到四只应答器时延相同,通过球面交汇构建方程组。
1.2 双应答器定位原理
当只接收到两只应答器时延,两个圆方程相减得到的线性方程为:

式(5)代入圆方程(1)得到:

则xs的双解为:

将式(8)代回方程(5),即可得到一组双解[xs,ys]。将两组解分别代入上一次定位周期的球面方程验解,即可确定真解。
2 仿真分析
为了分析应答信号有效个数对定位精度的影响以及载体位于不同位置时对定位精度的影响。对长基线定位结果进行仿真分析。仿真条件为:4只应答器的位置坐标分别为T1(−L/2,L/2,h)、T2(−L/2,−L/2,h)、T3(L/2,−L/2,h)、T4(L/2,L/2,h),基线长度L=3 000 m,布阵深度h=4 000 m,载体工作深度入水4 000 m。
在下面的仿真分析中,两只应答器解算时使用的是应答器1、2;三只应答器解算时使用的是应答器1、2、3;四只应答器解算时使用的是应答器1、2、3、4。
2.1 定位精度分布
误差为呈高斯分布的随机测距误差,对各点进行100次独立统计后,得到目标在区域内的定位精度分布图如图1所示。从图中可以看出,两只应答器有效时,定位精度分布如磁铁磁场的磁感线,两只应答器连线附近定位精度最低。三只应答器有效时,定位精度分布如圆环,三只应答器的中心定位精度最高。四只应答器有效时,定位精度分布如圆环,四只应答器的中心定位精度最高。
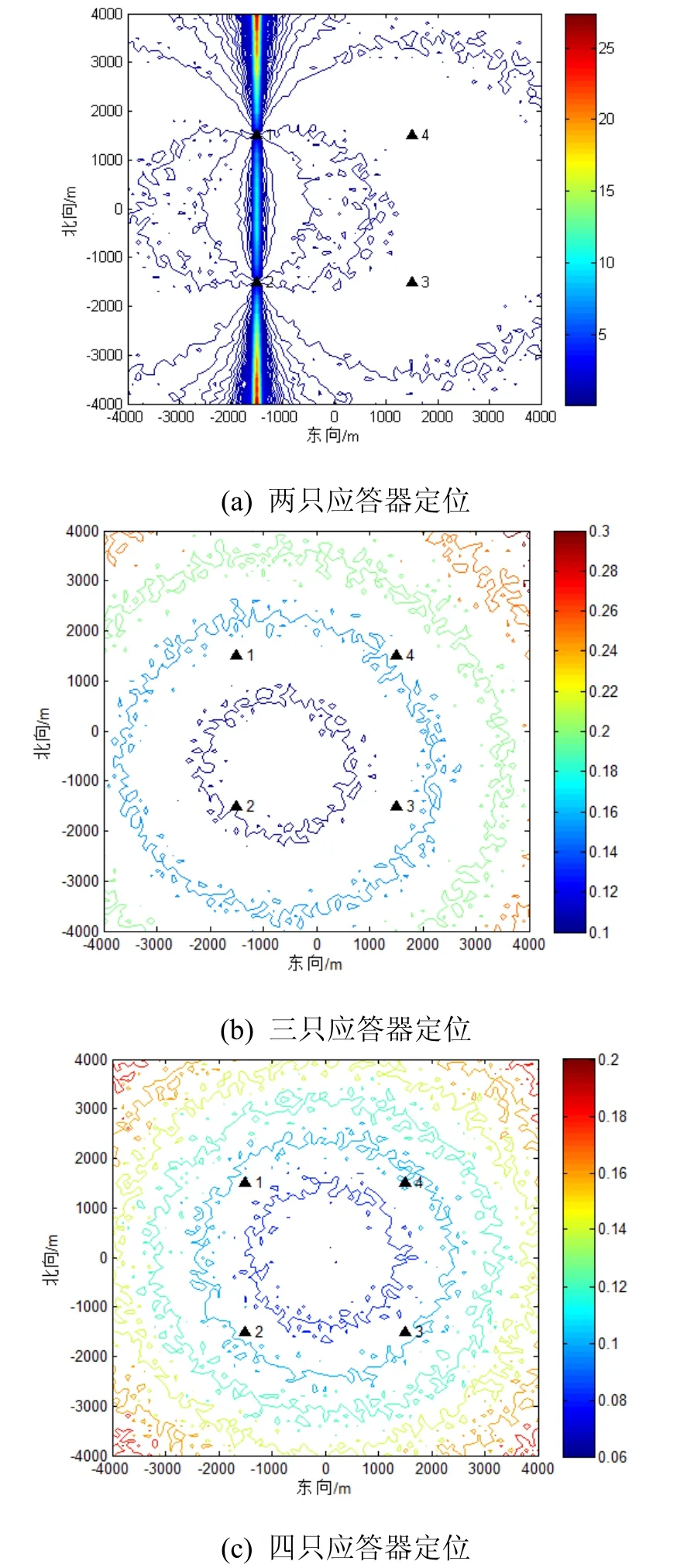
图1 定位精度分布图
2.2 基阵间距对定位精度影响
为了对比基阵间距对定位精度影响,将基阵间距缩短为1 000 m重新进行仿真,得到的定位精度分布图如图2所示。与图1对比可以看出,定位精度的分布规律仍然与图1相同,与基阵所在位置有关,不过基阵间距的减小导致定位精度的降低。

图2 缩短基阵间距后的定位精度分布图
2.3 不同量级误差对定位精度影响
针对不同量级误差对定位精度的影响程度,选取了定位区域内典型的位置点进行仿真分析,典型位置的选取如图3所示。设随机测距误差服从高斯分布,均值为0 m、标准差以0.1 m为间隔从0 m逐渐增加至1 m,进行1 000次的独立统计。
图4为定位误差随测距误差的变化曲线。从图中可以看出:(1)对于同样的测距误差,两只应答器定位时,连线中心点误差最大,距离中心越远的位置其定位误差越小;三只应答器和四只应答器定位时,中心点误差最小,距离中心越远的位置其定位误差越大。(2)对于同一个位置点,两只应答器定位时,其定位误差随测距误差的增加而增大,在非连线附近近似呈线性变化;三只应答器和四只应答器定位时,其定位误差随测距误差的增大而增大,近似呈线性变化。
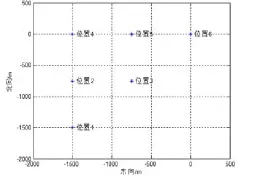
图3 典型位置选取

图4 不同量级误差对定位精度影响
2.4 不同个数应答器定位对定位精度影响
为了对比不同个数应答器定位对定位精度的影响,选取了几段典型航行轨迹。航行轨迹沿应答器1、2中垂线时,定位精度分布如图5所示。航行轨迹沿应答器1、2连线时,定位精度分布如图6所示。航行轨迹与应答器12连线成45°角时,定位精度分布如图7所示。
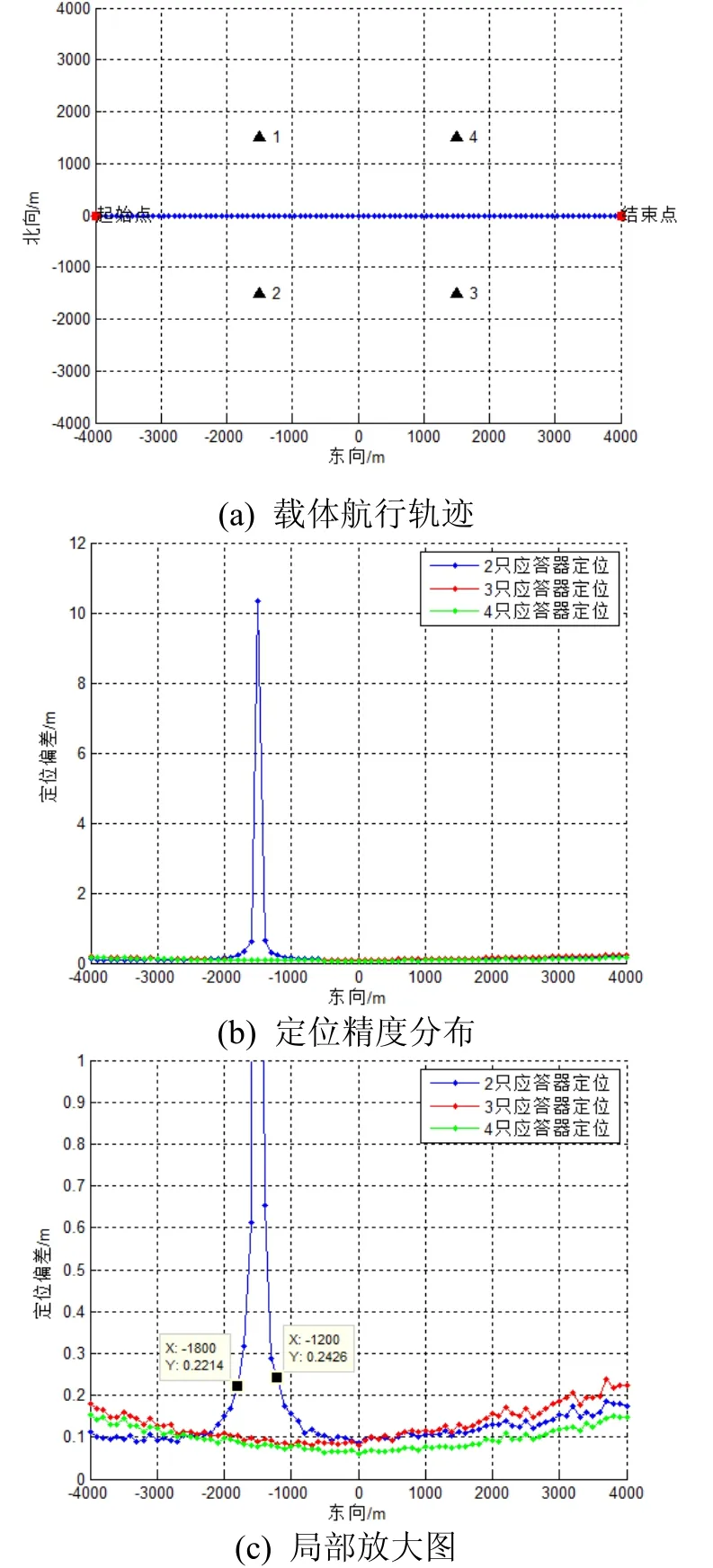
图5 载体航行轨迹和定位精度分布


图6 载体航行轨迹和定位精度分布
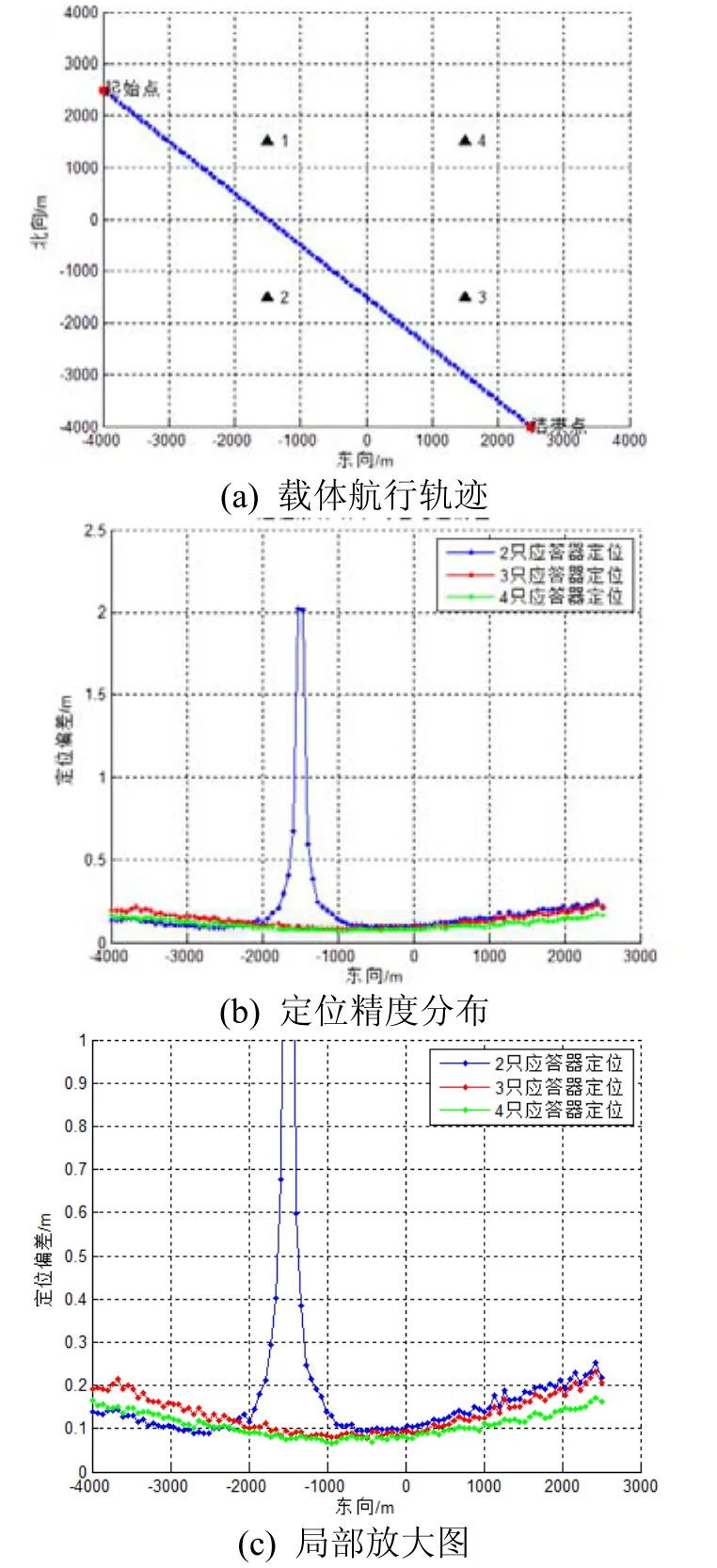
图7 载体航行轨迹和定位精度分布
从图中可以看出:(1)应答器1、2连线附近的低精度区域与基阵间距有关。在连线垂直方向,低精度区域长度近似等于基阵间距的1/5。在连线方向,低精度区域贯穿整个应答器连线,只在应答器所在位置定位精度高。(2)应答器1、2连线附近的低精度区域,三只应答器定位的定位精度与四只应答器定位的定位精度相差不大,两只应答器定位的定位精度低且相差比较大。(3)、应答器1、2连线附近的高精度区域,两只应答器定位的定位精度高,有些地方定位精度甚至优于三只应答器定位和四只应答器定位。
3 海试数据分析
为了验证仿真分析中的定位精度分布,需要有绝对位置与长基线定位的结果作比较,所以海试时用长基线定位水面试验船,水面试验船停船漂泊的同时记录水面试验船的GPS信息。基阵间距3 000 m,应答器布放深度4 000 m左右。
水面试验船的漂泊轨迹如图8所示。使用不同个数应答器定位解算结果如图9所示。海试数据分析时,两只应答器解算时使用的是应答器1、2,三只应答器解算时使用的是应答器1、2、3,四只应答器解算时使用的是应答器1、2、3、4。

图8 水面试验船漂泊轨迹

图9 不同个数应答器定位解算结果
使用不同个数应答器定位解算时,定位解算结果与GPS的偏差如图10所示。从图中可以看出,四只应答器解算时定位精度最高,三只应答器解算时定位精度次高,两只应答器解算时定位精度最低,但定位精度总体近似差别不是很大,当在某些位置不能够接收到所有应答信号时,使用不同个数应答器解算能够满足定位要求。海试数据的定位精度分布与图7的仿真分析结果中定位精度变化规律近似,对仿真分析的结果进行了验证。
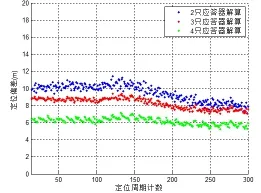
图10 定位解算结果与GPS偏差
4 结论
综合仿真和海试数据分析,两只应答器定位是可行的,但需要注意以下问题:
● 前提条件:解算时需要知道AUV自身的深度信息,对双解进行较准确的判决,在两只应答器连线附近存在一定误判风险。
● 精度分布:两点的定位误差关于应答器的连线成对称分布。在两只应答器连线附近的低精度区域,相对于三只应答器定位和四只应答器定位,两只应答器定位精度比较差。在应答器连线两侧的高精度区域,与三只应答器定位和四只应答器定位相差不是很大,有些区域定位精度甚至更高。
● 航迹要求:两点定位时,在两只应答器的连线附近,定位精度较低,沿着两只应答器的中垂线远离应答器连线,定位精度提高。所以设定航迹时,尽量在两只应答器中垂线附近且远离两只应答器的连线的区域。
[1]孙东磊,赵俊生,柯泽贤,等.当前水下定位技术应用研究[C].中国测绘学会海洋测绘专业委员会第二十一届海洋测绘综合性学术研讨会论文集,2009:178-180.
[2]兰华林.深海水声应答器定位导航技术研究[D].哈尔滨工程大学.2007:44-47.
[3]王东生,赵勋杰.噪声中弱信号的检测与估计[J].光电对抗与无源干扰,2002,(4): 10.
[4]高国青,叶湘滨,乔纯捷,等.水下声定位系统原理与误差分析[J].四川兵工学报,2010,31(6): 95-97.
[5]李述山.多源多维多类型多精度非线性数据处理中若干问题的研究[D].山东科技大学,2005.