多功能模态切换的有缆遥控水下机器人控制系统设计与实验
2014-03-07曾庆军王志东
陈 伟,眭 翔,曾庆军,王 彪,王志东,窦 京
(1.江苏科技大学电子信息学院,江苏镇江212003)(2.江苏科技大学船舶与海洋工程学院,江苏镇江212003)
长期以来,陆上自然资源被大量开采直至枯竭,而海洋中蕴藏着丰富的资源,是有待开发的宝藏[1].水下机器人具有安全、经济、高效等众多优点,能够代替潜水员在高深度和危险环境中完成高强度、大负荷的工作,是开发海洋资源的一种重要工具[2].有缆遥控水下机器人(remotely operated vehicle,ROV)是探测和开发海洋的“先锋”,已经成为一种重要的水下作业装备,并广泛应用于内河堤坝检测[3]、海洋工程结构物安装与维修[4]、深海资源探测[5]、海洋管线检修[6]、水下搜救[7]等领域.特别是以 ROV 与潜水员饱和潜水相结合的水下作业技术已成为海洋工程水下结构检测与清污技术的重要模式.因此,开展水下结构检测智能遥控机器人的研发工作,对于海洋平台的高效、安全运行具有十分重要的意义.
近几年来,国内外多数水下机器人只有浮游能力或爬行能力,而既能够浮游也能够爬行的水下机器人较为少见[8].美国LBC水下机器人是一种可进行浮游和爬行的水下监测机器人,它用四驱小车爬行,使用涡流发生器来产生负压吸附力[9].但是该机器人动力驱动装置众多(9个电机),供电系统额定功率大、能耗大,控制对象过多、复杂度高,电机利用率低,制造成本和加工难度较大.
文中基于国内外典型ROV控制系统的研究,设计出了一种面向海洋工程水下结构检测与清污、多功能、模块化、模态切换的新型ROV(mode-converted ROV,MC-ROV)控制系统.一方面,通过脐带缆与母船联系,MC-ROV可实现复杂环境下遥控和监控2种模式下的中等范围搜索、定点观测及水下轻作业;另一方面,通过水面控制平台控制MC-ROV水下作业,可以实现浮游勘察和爬行清污作业,并可实现在浮游和爬行模态之间自由切换.
1 总体设计
多功能模态切换水下机器人MC-ROV入水后,机载传感器将水下实时信息反馈到上位机界面.参照传感信息,操控人员利用上位机软件或操控手柄来控制MC-ROV水下作业,水下潜航体靠自身装配的推进器进行浮游运动,并利用观察设备进行水下勘察作业.接近目标壁面后,通过吸附推进器控制模态切换模块改变纵向电机动力作用点,实现浮游和爬行模态的切换:纵向电机与纵向螺旋桨齿合时可实现机器人4自由度浮游运动;纵向电机与传动箱齿合时实现机器人的爬行清污作业;传动箱可以给后置两车轮和清污滚轮传输动力,吸附推进器在爬行时提供壁面吸附力.MC-ROV吸附推进器被设计为多重功能,模块化的设计与开发有助于零件的更换与维修.整个系统制造成本低、加工方便简单、供电系统能耗较小;同时可以在壁面爬行和清洁,也可以浮游勘察作业,活动范围广.
按照上述功能特点,MC-ROV控制系统分水面控制系统和水下控制系统2个子系统,两者通过脐带缆连接实现信号、能源的传输.MC-ROV控制系统总体结构如图1.水面控制系统包括电源、操控摇杆和上位机软件,操控水下机器人运动并实时显示水下传感信息和视频信息.水下控制系统包括动力推进单元、水下控制器、视觉照明模块、水下传感设备4部分.其中动力推进单元和水下控制器设计最为重要.视觉照明模块由1个高清水下摄像机和2个水下LED灯组成.水下传感设备包括惯性导航装置和深度传感器,它们捕获的实时信息经过水下控制器处理后上传至水上控制系统,操控人员参考此信息对水下机器人浮游运动与爬行清污进行控制.
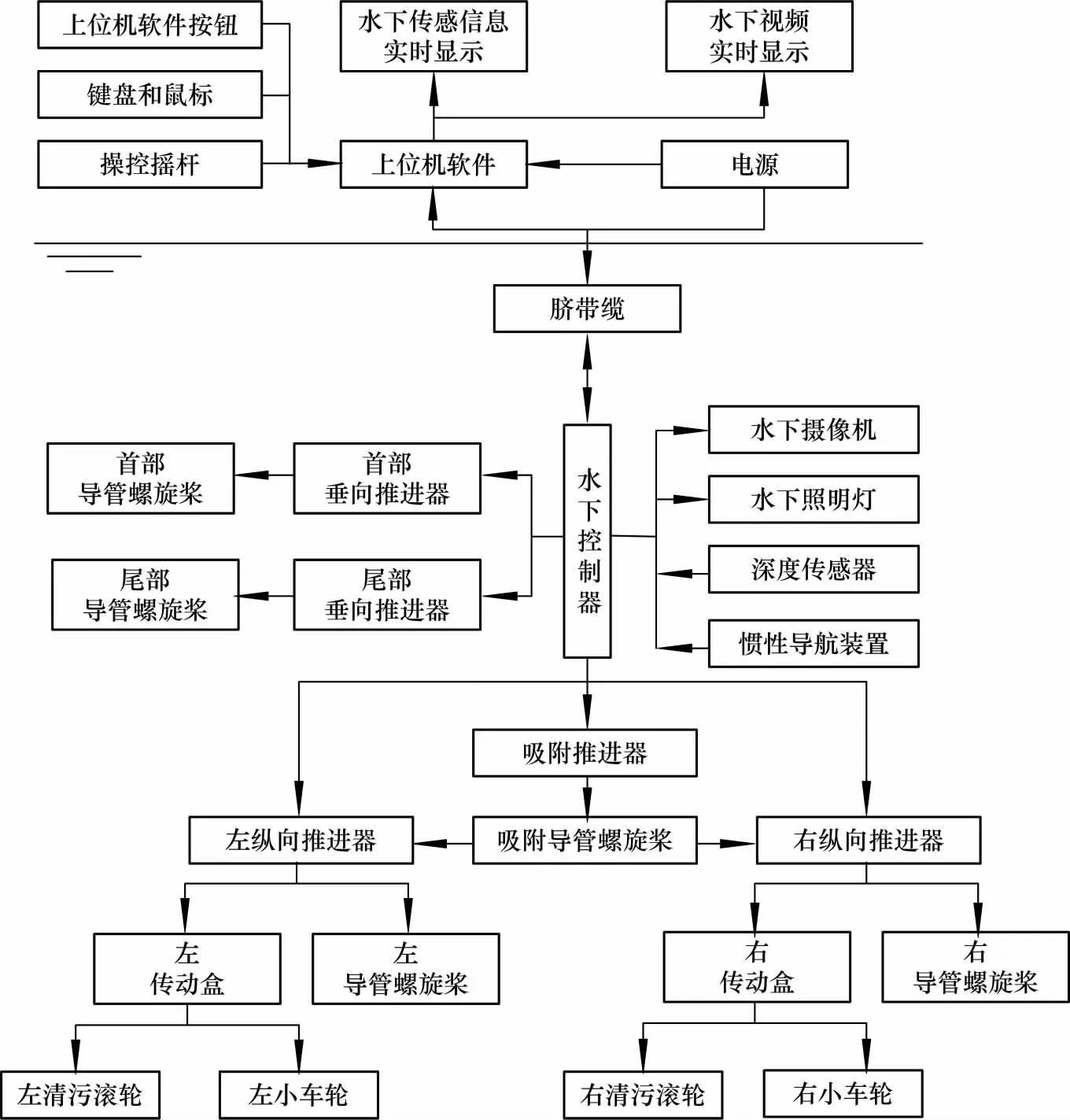
图1MC-ROV控制系统总体结构Fig.1 System structure of the MC-ROV
2 水下控制系统设计
2.1 动力推进单元设计
MC-ROV由5个推进器提供浮游动力,2个纵向推进器同转速时可进退,差速时可转艏运动;3个垂向推进器同转速可升沉,首尾2个垂向推进器差速可调纵摇姿态,为载体进行壁面爬行做前期准备.此种推进器布置方案,能够满足水下机器人浮游模态时的进退、潜浮、转艏运动,并且可以调整水下机器人的纵摇姿态.基于牛顿力学定律、质量与能量守恒定理,对粘性不可压缩牛顿流体建立连续方程和运动方程:
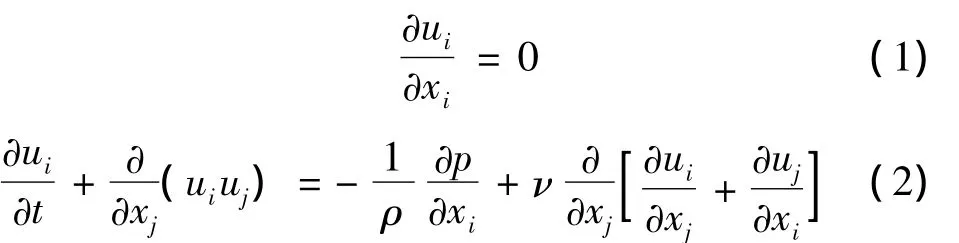
式中:ui(i=1,2,3)为3个坐标轴正方向上的速度分量,uj(j=1,2,3)为3个坐标轴负方向上的速度分量,xi(i=1,2,3)为3个坐标轴正方向上的坐标分量,xj(j=1,2,3)为3个坐标轴负方向上的坐标分量,p为压力,ρ为流体密度,ν为流体的运动粘性系数,t为时间.在模拟湍流运动时,需要把式(2)中的变量分解成时均量和脉动量φ′两个组成部分:

再对式(2)左右两侧对时间取平均,得到时均的连续方程:
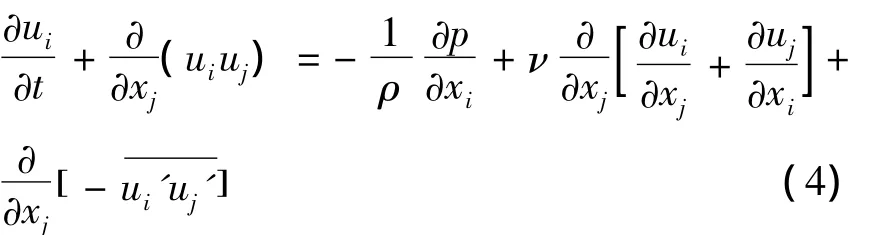
式中:u′i为正方向速度分量脉动量;u′i为负方向速度分量脉动量.将式(4)与式(2)进行比较后发现式(4)只是多了雷诺应力项,因此,在引入湍流模型后即可解决粘性流体的湍流流动问题[10].
六自由度机器人水下运动受力方程式为:
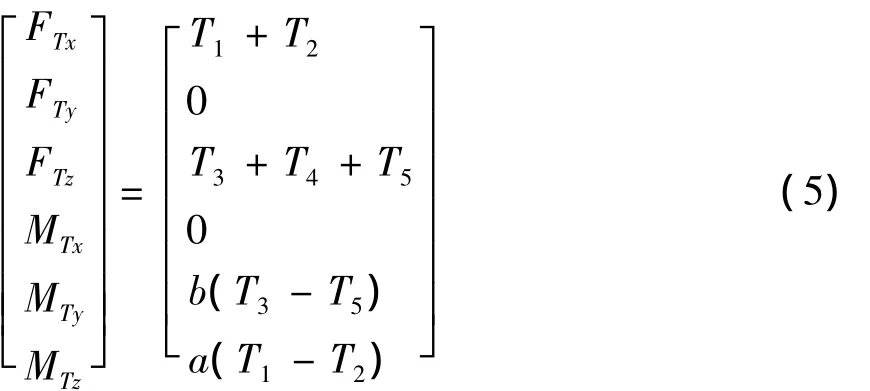
式中:T1,T2,T3,T4,T5分别为 5 个推进器的推力;FTx,FTy,FTz分别为机器人受到推进器的纵向、横向、垂向推力;MTx,MTy,MTz分别为机器人受到推进器的横摇、俯仰、回转力矩;a为水平向推进器与中轴线距离;b为垂直向推进器与中轴线距离.
由于水下机器人以进退为主要运动,所以根据纵向阻力来估算推进器的推力[11-12].水下机器人的阻力包括2个部分:水下机器人本体运动阻力和缆绳阻力.MC-ROV水下机器人本体运动阻力计算公式为:

式中:Cd为阻力系数,其取值用CFD软件Flvent来计算;V为水下机器人运动速度;ρ为水密度;L为特征长度,取MC-ROV水下机器人纵向长度1 m.而对于缆绳的阻力,通过下式估算求得:

式中:Cd为阻力系数,其取值在0.1~0.2之间,这里取0.12;A为特征面积,对于电缆,A等于电缆直径乘以垂直于水流方向的长度,这里取0.38.由此,根据公式(5),可以得出单个推进器的输出功率为:

综合考虑上述输出功率的计算结果,以及水下机器人常以低速航行的工作状态,选取200 W三叶桨HP推进器.水下动力推进单元包括垂向推进模块、纵向推进模块、模态切换模块、爬行清污模块.动力推进系统设计方案如下:设计5个推进器实现水下机器人升沉、进退、转艏、纵摇4个自由度的浮游运动以及爬行清污作业,其中垂直向推进模块的2个推进器实现升沉或纵摇运动,模态切换模块的1个吸附推进器实现壁面吸附;浮游时,模态切换模块的2个纵向推进器分别驱动纵向推进模块的2个纵向螺旋桨实现进退、转艏运动;爬行时,2个纵向推进器同时驱动爬行清污模块的2个后置小车轮和2个清污滚轮毛刷实现爬行清污同步作业;吸附推进器也可以驱动模态切换模块垂向运动以进行模态切换.设计出的模态切换模块实体如图2,爬行清污模块实体如图3.

图2 模态切换模块实体Fig.2 Mode converted device
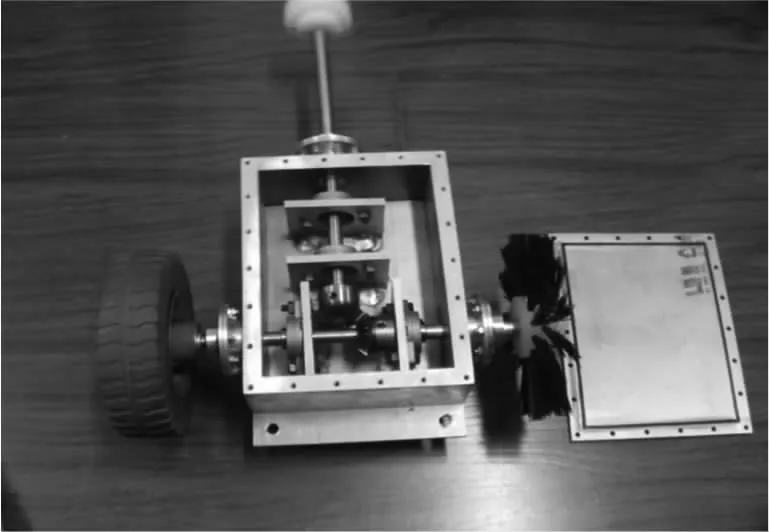
图3 爬行清污模块实体Fig.3 Interior structure of the module
2.2水下控制器设计
水下控制器以ARM微控制器CortexM4K60为核心,对机器人主体的动力、行为实行统一调度和控制.控制器结构如图4,惯性导航模块采用Mini IMU惯性导航模块采集加速度、陀螺仪信息,经过解算后获得姿态数据,实时采集ROV姿态信息.深度传感器采用扩散硅型压力传感器,用于采集水下机器人本体上浮下潜深度信息.推进器采用12 V/200 W有刷直流电机,电机驱动使用全桥驱动方式,控制器只要发出PWM信号即可以控制转速.ROV带有一路高清模拟摄像头,同时设计了视频采集分离模块用于传输水下视频信息.由于机器人本体需要24,12,5,3.3V 4种电压电源,故根据不同要求采用DC/DC稳压电源、DC/DC隔离电源相结合的方式供电,并设计了电压电流检测模块.系统通信采用485总线,并采用TTL转485通信模块,半双工模式工作.
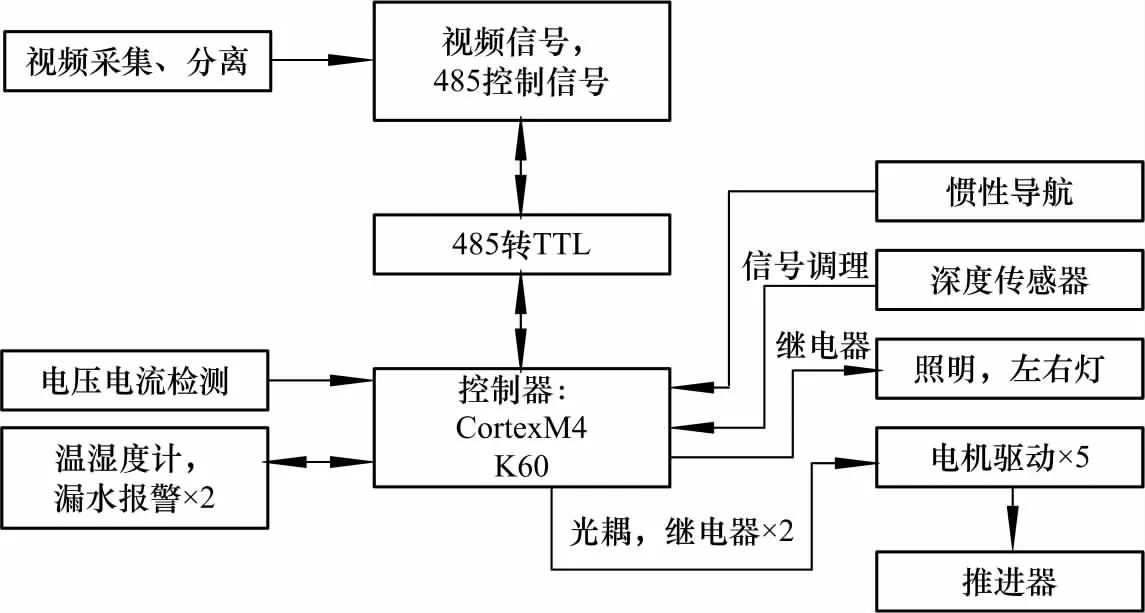
图4 水下控制器硬件结构Fig.4 Hardware structure of underwater vehicle
3 水面控制台设计
水面控制台包含供电系统、操控系统和通信接口.控制系统采用220 V交流电供电,一方面给水面控制台的电脑供电,另一方面经过大功率AC-DC电源转换成24V直流电给水下潜航体供电.水面控制台还包含一台PC电脑,一套485通信系统,一个视频采集模块和一只摇杆.上位机需要实时显示惯性导航设备(三轴陀螺仪、三轴加速度,三轴强磁计)、GPS、压力计(测深度)、推进器速度(目标、实际速度)的数据信息,同时将计算后的姿态信息显示出来,通过惯性导航算法,将MC-ROV的运动轨迹绘制出来进行三维显示;另外还需要显示摄像头的画面,允许情况下可作进一步的图像处理.水面控制台如图5,序号① ~⑥分别是机器人主体、脐带揽、上位机、电源、控制柄和鼠标.
上位机控制主界面如图6,控制界面的上部为水下机器人各状态信息的显示区(包括深度值、水下照明灯状态、压力值、电子锁状态、电机转速、开关状态等),通过按钮控件可以设定数据保存、保存路径、开始停止保存数据及通信速率等其他参数的设置.控制界面的中部为模拟图显示区,主要有电子舱温度湿度、实时姿态数据图、ROV推进器分布示意图.控制界面的下部为模式选择区,可以对ROV运动状态进行控制和切换,实现复杂环境下遥控和监控2种模式下的中等范围搜索、定点观测及水下轻作业,并可在浮游和爬行模态之间自由切换.系统支持摇杆操作,通过摇杆可以实现控制界面大部分的功能,简化了操作步骤.主界面左侧为视频图像显示区,右侧为控制、信息显示与保存、报警、子窗体等多种功能区域.
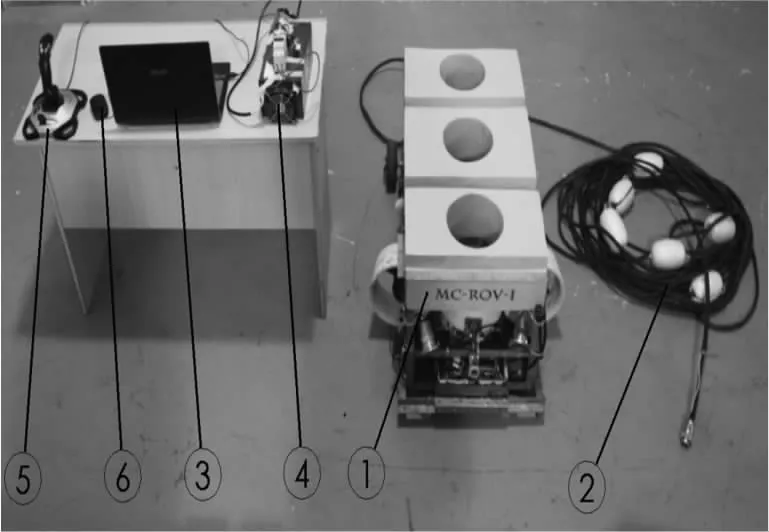
图5 水面控制台组成Fig.5 Console of water surface

图6 上位机控制主界面Fig.6 Main control interface
4 实验研究
MC-ROV控制系统实验是基于人机交互界面和机器人主体进行的,其中交互界面采用VC编程实现.水下实验主要包括姿态测试实验、定航实验和定深实验.
4.1 姿态测试实验
MC-ROV姿态测试实验之前,先要进行通信测试,即检验通信协议和上下位机联机的正确性.做好准备工作后,首先打开上位机主界面上的串口设置,按照通信协议,设置正确的串口、波特率、数据位等参数,如图7.点击“打开端口”选项卡后,指示灯亮,通信开始,上、下位机互相交换数据.通信成功后,可以在主界面左下角看到通信正常提示.

图7 串口设计界面Fig.7 Serial-port setting interface
MC-ROV水下航行时,需要对它的姿态角实时准确把握,以便及时调整.水下机器人的姿态角包括横滚角、俯仰角和偏航角,姿态测试实验的主要目的是检验姿态角的准确度,找出误差数据.实验中,MC-ROV姿态数据自动保存于数据库中,而在上位机界面中借助姿态曲线图(图8)和MC-ROV三维运动示意图(图9)可以直观的看到水下机器人的姿态变化和趋势.实验结果表明,水下机器人MC-ROV的横滚角和俯仰角较为精确,误差在0~1.5°;偏航角误差稍大,在0~3°左右,姿态角满足性能要求.MC-ROV水下姿态测试实验如图10.
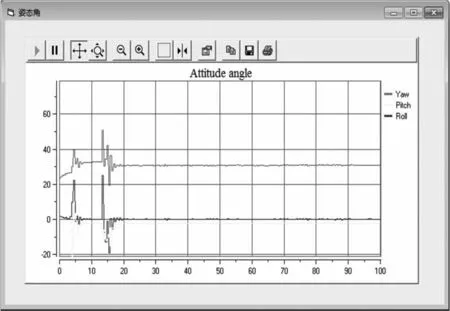
图8MC-ROV姿态曲线图Fig.8 Attitude change curve of MC-ROV
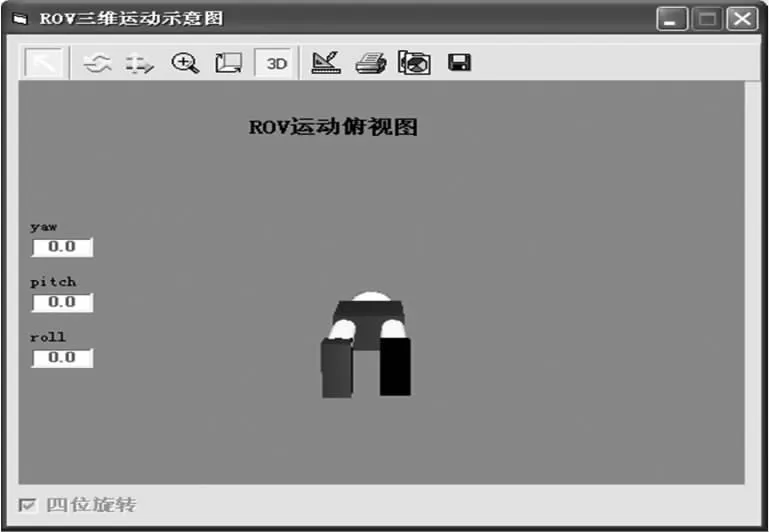
图9MC-ROV三维运动示意图Fig.9 3D motion diagram of MC-ROV

图10MC-ROV水下姿态测试实验Fig.10 Underwater attitude test of MC-ROV
4.2 水下定航实验
定航是水下机器人的主要功能之一,也是衡量水下机器人性能的主要指标之一.在MC-ROV系统中设定期望航行角后,利用导航传感器记录MCROV水下实际航行数据.将实验数据导入MATLAB,按照导航解算步骤编写程序,绘制出定航曲线(图11).分析定航曲线图后可知,MC-ROV系统定航响应快,超调小,从第15 s开始调整,到第20 s稳定,稳定时间在5 s以内,航向稳定后误差范围在3°以下,满足定航要求.而误差产生的原因主要是由于惯性器件误差随时间累积导致导航效果变差.MCROV水下定航实验如图12.
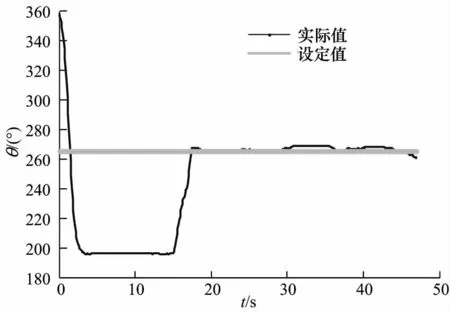
图11MC-ROV定航实验曲线Fig.11 Navigation test curve of MC-ROV

图12MC-ROV定航实验Fig.12 Navigation test of MC-ROV
4.3 水下定深实验
与定航一样,定深也是检验水下机器人性能的主要指标之一.在MC-ROV系统中设定期望深度后,利用深度传感器记录MC-ROV水下实际航行数据.定深曲线与定深误差曲线分别如图13,14.图13中,初始数据为深度传感器上传数据,修正数据指滤除常值误差和粗大误差后的深度值,设定值为所要到达的深度.由图13,14可知,定深实验开始后,MCROV大约需要15 s左右才能达到预定深度;误差基本上在0~0.2m范围内波动.其主要原因有3个:①选取的推进器功率稍小,动力略显不足;②定深设备固有误差较大;③因为水流压力的随机性对深度传感器造成了不确定性影响.MC-ROV水下定深实验过程如图15.
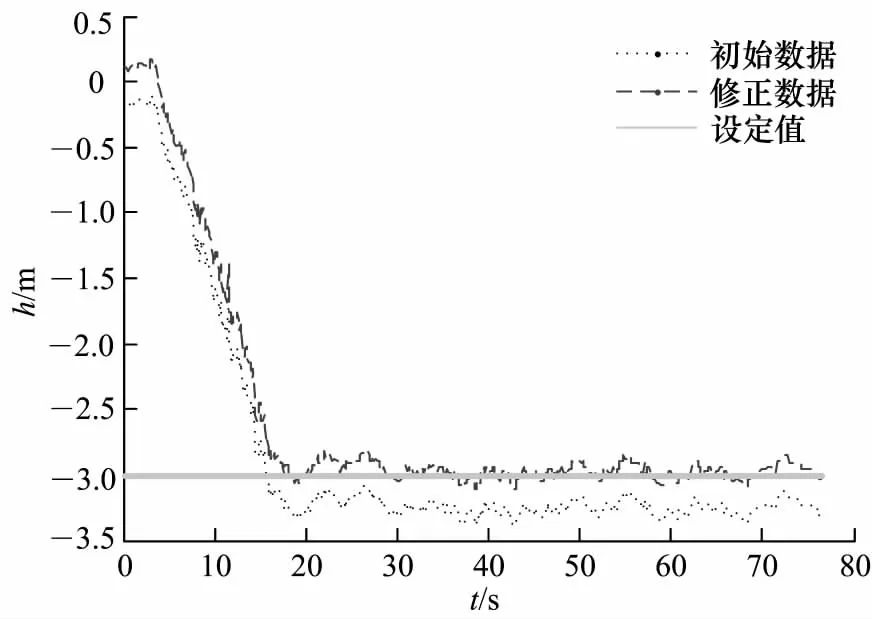
图13MC-ROV定深实验曲线Fig.13 Depth test curve of MC-ROV
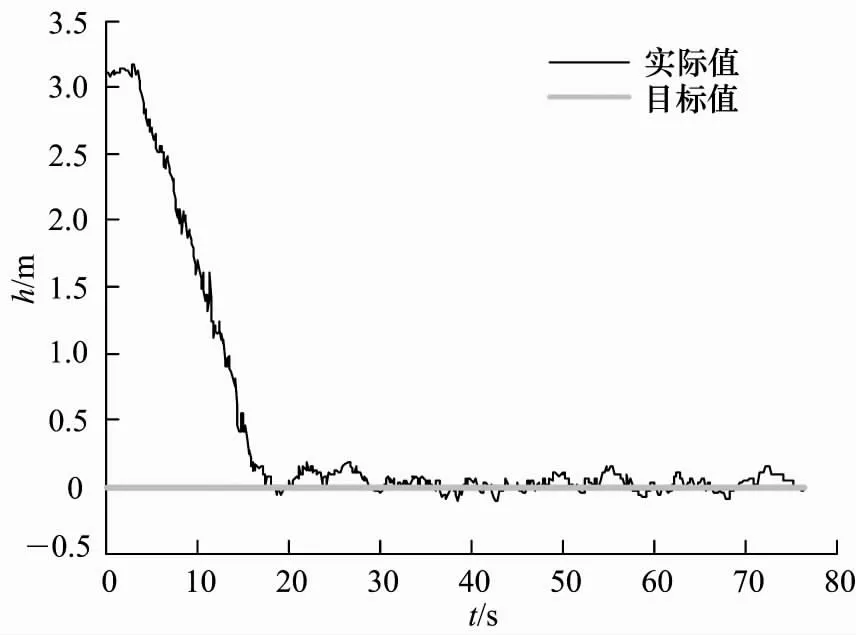
图14MC-ROV定深误差曲线Fig.14 Depth error curve of MC-ROV

图15MC-ROV下潜定深实验过程Fig.15 Depth test of MC-ROV
5 结论
文中针对一种面向海洋工程水下结构检测与清污、多功能模态切换的新型ROV,开发了一套水面水下控制系统.水面控制系统包括电源、操控摇杆和上位机软件,可以操控水下机器人运动并实时显示水下传感信息和视频信息.水下机器人本体包括水下控制器、视觉照明模块、水下传感设备、动力推进单元4个部分.通过对机器人本体水下运动受力分析,设计出了动力推进单元,并搭建了水下控制器单元;水面控制台包含供电系统、操控系统和通信接口,上位机软件可实现遥控和监控2种模式下的中等范围搜索和定点观测,并可在浮游和爬行模态之间自由切换.水下实验结果表面:该ROV控制系统性能可靠,能够满足复杂多变环境中的工作要求.
References)
[1] 刘正元,王磊,崔维成.国外无人潜器最新进展[J].船舶力学,2011,15(10):1182-1193.Liu Zhengyuan,Wang Lei,Cui Weicheng.State-of-theart development of the foreign unmanned submersibles[J].Journal of Ship Mechanics,2011,15(10):1182-1193.(in Chinese)
[2] Lionel L,Didik S.Nonlinear path-following control of an AUV[J].Ocean Engineering,2007,34(2):1734-1744.
[3] 甘永,孙玉山,万磊.堤坝检测水下机器人运动控制系统的研究[J].哈尔滨工程大学学报,2005,26(5):26-32.Gan Yong,Sun Yushan,Wan Lei.Research on motion control system of GDROV[J].Journal of Harbin Engineering University,2005,26(5):26-32.(in Chinese)[4] Rust I C,Asada H H.The eyeball ROV:design and control of a spherical underwater vehicle steered by an internal eccentric mass[C]∥IEEE International Conference on Robotics and Automation.USA:IEEE,2011:5855-5862.
[5] 朱大奇,刘乾,胡震.无人水下机器人可靠性控制技术[J].中国造船,2009,50(2):75-80.Zhu Daqi,Liu Qian,Hu Zhen.Reliability control technology of unmanned underwater vehicles[J].Shipbuilding of China,2009,50(2):75-80.(in Chinese)
[6] 马洪新,江锦,杜颖,等.海底管道更换维修技术及工程实践[J].中国造船,2009,50(S):991-995.Ma Hongxin,Jiang Jin,Du Ying,et al.The replacement repair technology and project fulfillment on sub-sea pipeline[J].Shipbuilding of China,2009,50(S):991-995.(in Chinese)
[7] Azis F A,Aras M S M,Rashid M Z A.Problem identification for underwater remotely operated vehicle(ROV):a case study[J].Procedia Engineering,2012,41:554-560.
[8] 姚峰.水下机器人基础运动控制体系结构及运动控制技术研究[D].哈尔滨:哈尔滨工程大学,2012.
[9] Rodocker D,Rodocker J.Underwater crawler vehicle having search and identification capabilities and methods of use:United States,US 2007/0276552 A1[P].2007.
[10] Pablo J,Avila J,Adamowski J G.Experimental evaluation of the hydrodynamic coefficient of a ROV through Morison′s equation[J].Ocean Engineering,2011,38:2162-2170.
[11] 吴家鸣,郁苗,朱琳琳.带缆遥控水下机器人水动力数学模型及其回转运动分析[J].船舶力学,2011,15(8):827-836.Wu Jiaming,Yu Miao,Zhu Linlin.A hydrodynamic model for a tethered underwater robot and dynamic analysis of the robot in turning motion[J].Journal of Ship Mechanics,2011,15(8):827-836.(in Chinese)
[12] Wang Tian,Ye Xiufen,Wang Lei,et al.Hydrodynamic analysis and optimization for dish shaped underwater robot[C]∥2011International Conference on Mechatronics and Automation,2011:1406-1411.
