嫦娥三号测距测速雷达回波的数值仿真
2014-03-05叶红霞金亚秋
叶红霞 金亚秋
(复旦大学电磁波信息科学教育部重点实验室,上海200433)
引 言
自从1969年美国阿波罗11号飞船实现人类首次登月,几十年来,人类通过对月球探测获得了相当丰富的数据,对月球形状大小、轨道参数、近月空间环境、月球岩石类型与化学成分、月球资源与能源、内部结构与演化历史等研究取得了一系列突破性进展.月球将是人类长期进行深空探测的中转站,也是一个庞大的“太空实验室”,重返月球是空间科学发展的必然趋势.2003年欧洲成功发射“智能一号”(SMART-1)探测器,于2006年撞击月球卓越湖地区,取得了丰富的科学成果[1].2007年日本“月亮女神”(SELENE)探月卫星发射升空,其上搭载了14种高精度仪器对月球构成及其演变进行精确探测(如观测月面地形、研究月面成分和矿物组成、表面和次表面结构、重力场、磁力场、高能粒子环境,以及月球等离子区等),并于2009年成功撞月,其上搭载的月球雷达探测仪(Lunar Radar Sounder,LRS)探月雷达中心频率4~6MHz,探测深度为4~5 km[2].我国“嫦娥2号(CE-2)”卫星2010年成功发射,在100km高度月球轨道上实现了高分辨率(7 m)全月球立体影像绘制,并在15km高度对未来CE-3预选着陆点虹湾地区进行了1m分辨率成像.即将发射的CE-3将携带软着陆器,对着陆地区的地形地貌、地质构造和月表环境等进行现场探测和取样分析.然而即使相对平坦的虹湾地区,其影像图显示地形坑坑洼洼,遍布米级、几十米、几百米直径的环形坑,同时还有许多分布在环形坑底部、坑壁及坑缘地区的约米级零散石块.由于月球着陆器对地面平整度的要求非常高,有必要凭借高分辨率的数据,开展进一步分析验证并做出最终选择.
选取CE-3着陆点虹湾地区为仿真区域,根据月球表面的地形地貌(高分辨率数字地型模型(Digital Terrain Model,DTM)高程数据)及物理组成(月壤复介电常数),基于大尺度起伏粗糙的基尔霍夫模型(Kirchhoff Analysis KA)进行电磁计算[3-4],并根据雷达回波模型进行散射系数(Normalized Radar Cross Section,NRCS)分析、高度测量等问题研究.
1 理论分析
1.1 波束建模与数据准备
嫦娥3号测距测速雷达配置有5个天线波束,各波束中心指向的几何关系如图1所示,其中R4和R5相互垂直,R4在主减速初始阶段垂直指向月面,而R5在着陆器姿态快速调整之后垂直指向月面.R1、R2、R3均匀分布在一个半锥角为17°的圆锥上,圆锥轴线、波束R1以及波束R4和R5在同一垂直平面内,圆锥轴线与R5波束中心的夹角为30°.每个天线的波束宽度为6°×6°,雷达工作频率选择X频段(波长3.8cm)和Ka频段(波长8.76 mm).
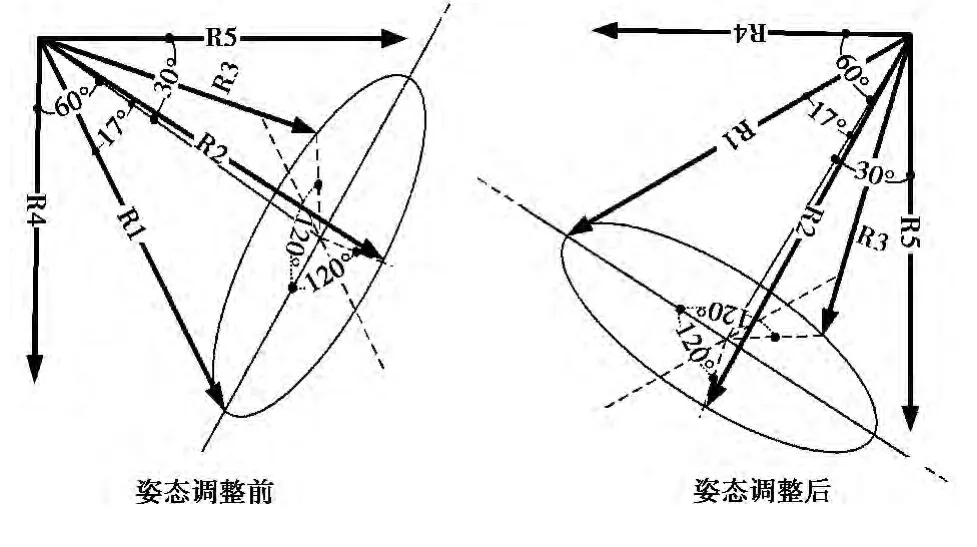
图1 雷达波束模型
为了更好地考虑月面环形山、随机起伏地形等对电磁散射的影响,需要利用尽可能高分辨率的月面高程数据.日本2010年发布了SELENE计划中搭载的月球成像仪/光谱仪(Lunar Imager/Spectrometer,LISM)获取的高分辨率DTM数据,该数据的横向分辨率为7.403m,数据类型为整型.我们选取如图2所示的某局部区域进行模拟仿真,左侧是30m分辨率的地形图,右侧是由两块7.403m分辨率的DTM数据拼凑而成的精细地形图.图3描绘了该区域月面高程沿两个垂直方向上的采样曲线.可以看出:即使看似相对平滑的虹湾地区,由于若干大小不一的环形山起伏的影响,其地形起伏变化很大,不能简单地看成平面模型进行处理.对于本文考虑的X波段λ=3.8cm、Ka波段λ=8.76mm而言,横向分辨单元尺寸远大于电磁波长,可考虑大尺度起伏的KA模型来分析这种起伏表面的电磁散射计算.
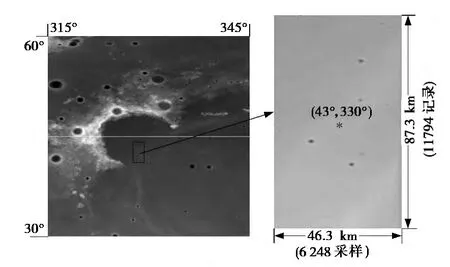
图2 虹湾地区LISM DTM高程地形
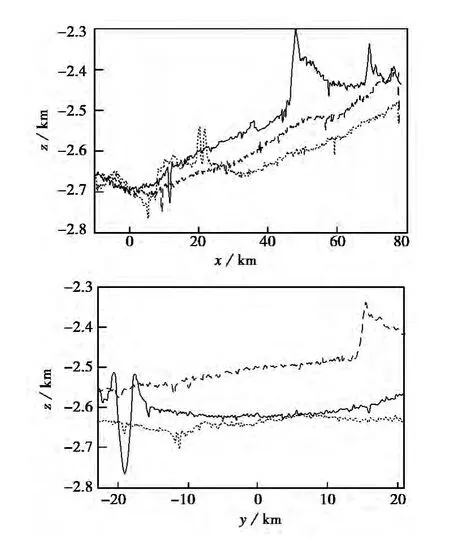
图3 LISM DTM高程沿y和x方向的变化曲线
设雷达局部坐标系内天线辐射场(即粗糙面上的入射场)表示为

1.2 雷达后向回波计算
根据Huygens原理,在切平面近似和远场近似条件下,粗糙面上任一面元ΔSm在探测雷达位置处的二次辐射场可写成[5]
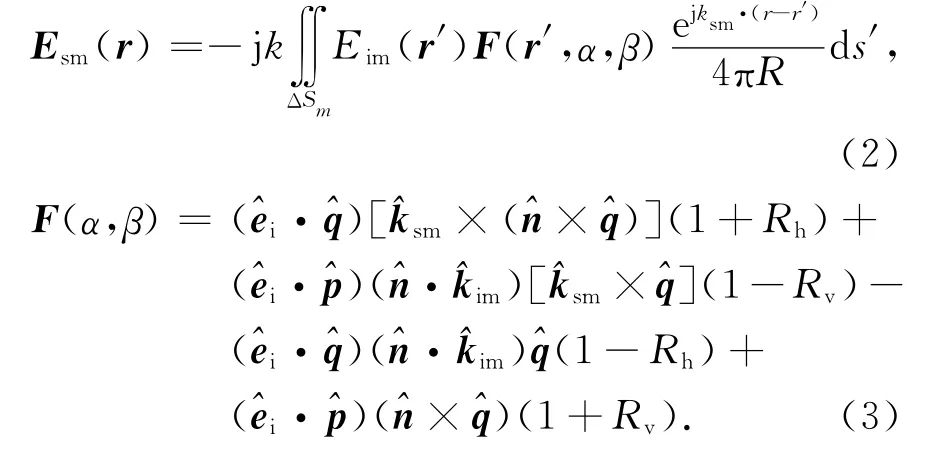
式中:Eim为局部面元照射场的振幅;为粗糙面局部位置的正交坐标矢量,对后向雷达接收和Rv为粗糙面局部区域的水平和垂直极化反射系数.
若忽略每个面元上照射场的幅度变化,只考虑其相位干涉贡献,则总散射场可近似成
式中Rm=|rm-r|表示面元中心到雷达的直线距离,上式中的相位积分可解析计算为[4]
式中:kd=ki-ks;Δx、Δy为粗糙面的横向离散间隔.这样无需对粗糙面元进一步离散剖分,大大降低计算复杂度.

式中r取波束中心点到雷达平台的距离;E0=1/(4πr)为波束中心点的入射波强度.分别取=即可得到两种极化的回波功率Pr和归一化散射系数NRCS.
2 实验结果分析
对图2中中心经纬度(N43.0°,E329.7°)的一块局部区域进行数值仿真,图4分别给出了不同波段(Ka波段和X波段)两种极化(VV极化和HH极化)情况下每个雷达波束接收到的回波强度Pr随雷达下降高度的变化曲线.
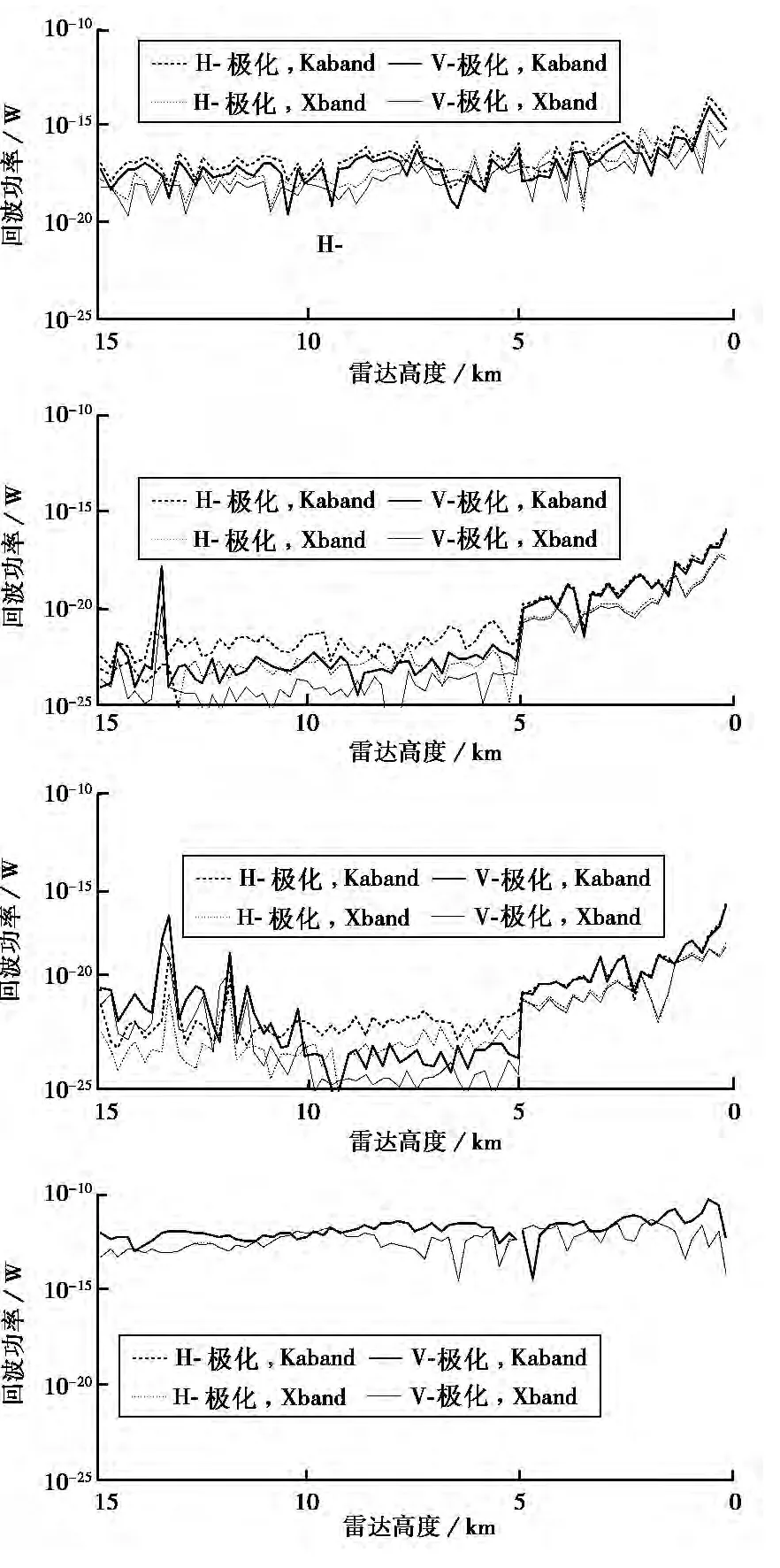
图4 雷达回波功率随雷达高度的曲线
3 结 论
本文根据日本SELENE提供的月球高分辨率DTM数据,基于高频KA方法仿真计算探测雷达下降过程中雷达散射回波,分析雷达高度、波束角、极化、频率等参数回波特性的影响.
[1]FOING B H,HEATHER D J,ALMEIDA M,et al.The science goals of ESA’s SMART-1mission to the moon[J].Earth,Moon and Planets,2001:523-531.
[2]ONO T,KUMAMOTO A,KASAHARA Y,et al.Lunar radar sounder(LRS)experiment on-board the SELENE spacecraft[J].Earth Planets Space,2004,52:629-637.
[3]FA W Z,JIN Y Q.Simulation of radar sounder echo from lunar surface and subsurface structure[J].Science in China(D),2010,53(7):1043-1055.
[4]YE H,JIN Y Q.A hybrid analytical-numerical algorithm of scattering from an object above a rough surface[J].IEEE Trans on Geoscience and Remote Sensing,2007,45:1174-1180.
[5]TSANG L,KONG J A.Scattering of Electromagnetic Waves:Advanced Topics[M].Wiley Interscience,2001.
