自适应联邦滤波算法在鱼雷多参量导航定位中的应用
2014-02-28李建辰国琳娜洪剑英
曹 萌, 李建辰, 国琳娜, 黄 海, 洪剑英
自适应联邦滤波算法在鱼雷多参量导航定位中的应用
曹 萌1,2, 李建辰1,2, 国琳娜1,2, 黄 海1, 洪剑英1
(1. 中国船舶重工集团公司 第705研究所, 陕西 西安, 710075; 2. 水下信息与控制重点实验室, 陕西 西安, 710075)
针对鱼雷水下航行的特殊性以及组合导航系统中由于量测噪声统计特性的不确定而导致滤波精度降低的问题, 提出了一种新的应用于鱼雷导航定位的自适应滤波算法。该算法通过新息自适应量测噪声, 在噪声统计特性未知的情况下能进行滤波计算。同时在信息融合时提出一种新的自适应信息分配方法, 该方法利用估计的均方误差阵来实时确定各子滤波器的信息分配系数, 使信息分配系数能够跟随子滤波器的性能而改变。通过对新算法与标准卡尔曼滤波算法所做的对比仿真试验分析, 结果表明, 该自适应联邦滤波算法在鱼雷多参量自适应联邦滤波导航定位应用中的有效性。
鱼雷; 组合导航;自适应联邦滤波;信息融合; 新息
0 引言
鱼雷具有隐蔽性好、攻击威力大、航速高和抗干扰性强等特点, 是海军潜艇的主战武器。目前, 大型航母编队的内层反潜防区范围可达50n mile, 航母编队的航速在不断提高, 反潜探测能力相应不断增强。而提高鱼雷航速, 航程会降低; 线导段和程序制导段的自主导航定位精度对鱼雷自导开机后搜索目标的成功与否密切相关。可见, 实现高精度导航定位是目前首要解决的关键问题。鱼雷具备远程精确导航定位能力, 可显著提高其作战效能, 确保在鱼雷高速强噪声干扰和复杂水声对抗环境下实现对敌有效打击, 从某种意义上讲远比增加装药量更具威力和高效。同时, 精确的导航定位也是实现鱼雷远程巡航及集群攻击的基础, 是鱼雷进入现代网络化战争的必要条件。
目前, 鱼雷上可使用的导航信息包括发动机转速拟合所得雷载测速、磁航向、深度和捷联惯性导航系统等。结合鱼雷航行的弹道, 充分挖掘这些雷载多传感器信息的隐含资源, 辅助惯性导航系统, 实现多传感器信息间的最优融合, 将捷联导航数学平台的误差模型作为卡尔曼滤波的状态估计参量, 组成多参量的组合导航系统。然而, 标准卡尔曼滤波要求系统模型准确且误差模型和观测误差模型已知, 但鱼雷组合导航系统在工作过程中, 模型是时刻变化的, 这就会导致标准的滤波发散或精度降低。基于此, 本文在标准卡尔曼滤波的基础上, 设计了一种自适应联邦滤波方法。该方法通过新息自适应量测噪声, 在噪声统计特性未知的情况下能进行滤波计算, 且在信息融合时能在线估计信息分配系数, 具有一定的稳定性和抗干扰性, 结构简单, 计算量小。
1 鱼雷组合导航系统数学模型
鱼雷在水下航行时, 无法获取高精度的辅助导航信息, 只能通过雷体自身的传感器获取, 测量信息仅为速度和航向信息。
本文采用两级分布式反馈校正联邦滤波技术, 组成多参量的组合导航系统。联邦滤波器以捷联惯导系统作为公共参考系统, 雷载测速、磁航向计、在线估计雷速分别组成单独的子滤波系统, 惯导系统的输出一方面直接给主滤波器, 一方面输出给各子滤波器作为量测值, 各子系统之间相对独立, 其导航信息作为主滤波器的输入在主滤波器中完成时间和信息的更新以及融合, 从而输出速度、姿态和位置等精确的导航定位解算结果。鱼雷多参量组合导航定位系统框图如图1。
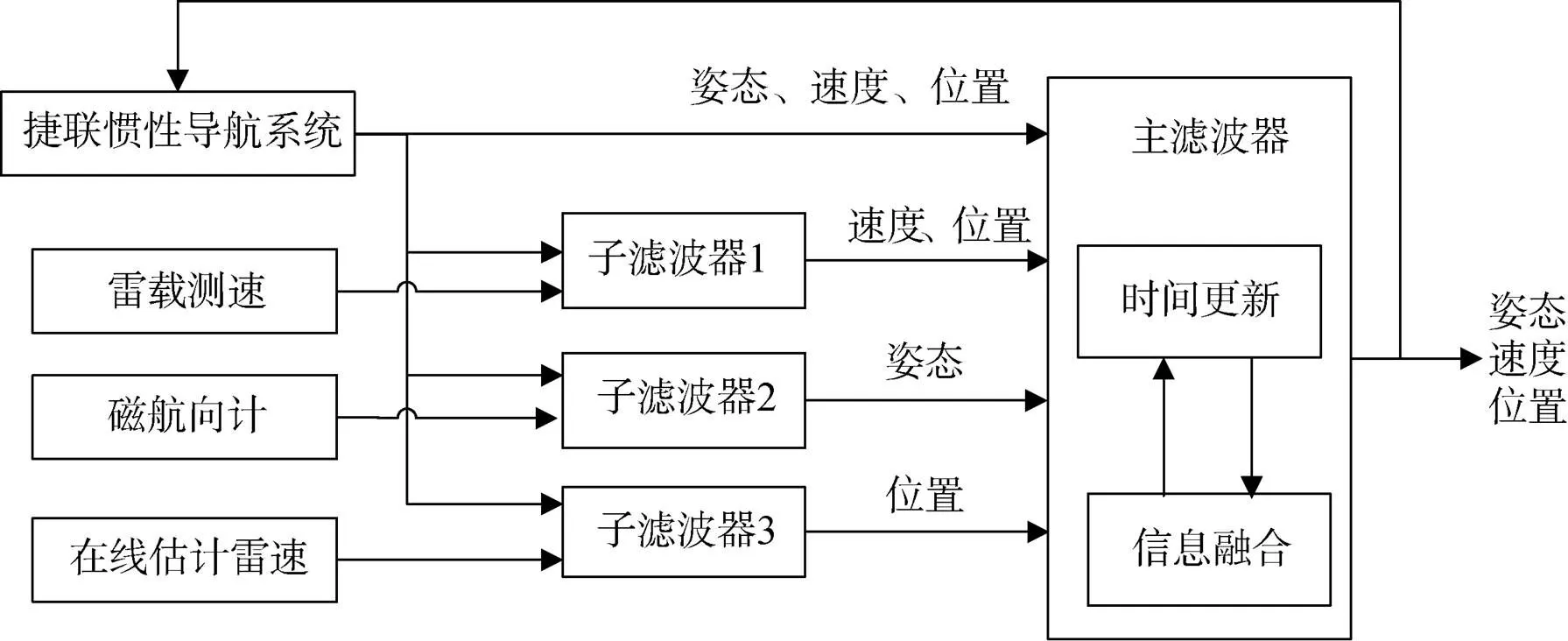
图1 多参量组合导航定位系统图
1.1 系统的状态方程
鱼雷多信息融合组合导航定位系统以惯性导航参数误差量及传感器误差量为状态变量, 即选取雷速误差、姿态误差及传感器误差(包括惯性器件误差和磁航向计误差)作为状态向量

系统状态方程为

1.2 系统的量测方程
1.2.1子滤波器1的量测方程
引入发动机转速推算的速度与捷联惯性导航(strapdown inertial navigation system, SINS)速度之差作为观测量, 得到量测方程


1.2.2子滤波器2的量测方程
子滤波器2采用磁航向计输出的航向信息与SINS航向之差作为观测量, 其量测方程为

1.2.3 子滤波器3的量测方程
由于在鱼雷定角爬潜过程中, 攻角很小, 若忽略攻角的影响, 深度信息与雷速的关系为

即利用深度变化量推算得雷体速度的估计量

子滤波器3采用鱼雷定角爬潜过程的深度信息推算的速度与SINS速度之差作为量测信息, 其量测方程为

2 自适应联邦滤波算法
2.1 自适应卡尔曼滤波算法
系统经离散化后为



使用标准卡尔曼滤波算法的前提是要预先确定系统噪声和量测噪声协方差阵, 由于噪声的统计特性与实际情况不符, 会引起滤波误差增大, 故有必要对标准卡尔曼滤波算法进行改进。
改进的自适应滤波算法如下[2-3]





改进的自适应滤波算法是以新息自适应量测噪声, 故而新息的异常会引起滤波的发散, 因此在进行自适应滤波处理时可以根据新息来判断滤波是否发散[1], 即


2.2 联邦滤波信息分配方法

在实际应用中, 希望滤波器的整体性能能够随时接近其中性能最优的子系统, 也就是使信息分配系数能够跟随子滤波器的性能而改变。由于在卡尔曼滤波器中, 估计的均方误差阵包含了估计误差信息, 能反映滤波器的性能。因此, 可以利用估计的均方误差阵来实时确定各子滤波器的信息分配系数[5]。

3 仿真验证
从图上的仿真曲线可看出, 采用自适应联邦滤波算法, 能够在标准卡尔曼滤波算法的基础上进一步提高导航定位精度, 比标准卡尔曼滤波的定位误差降低约37.5%, 且优于原有的姿态精度。
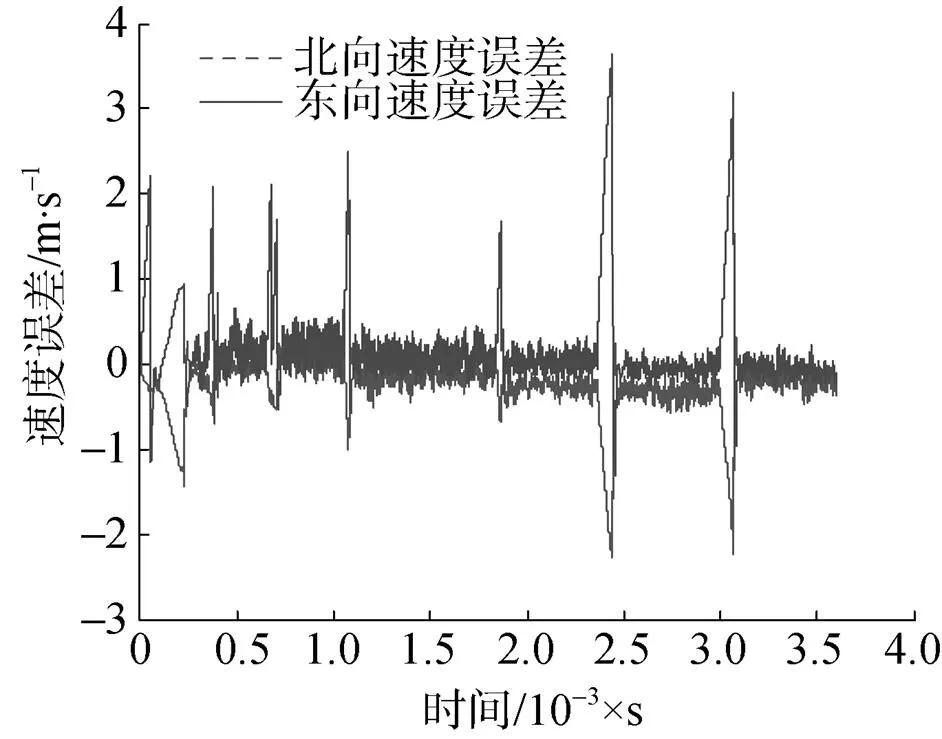
图2 标准卡尔曼滤波算法下速度误差曲线
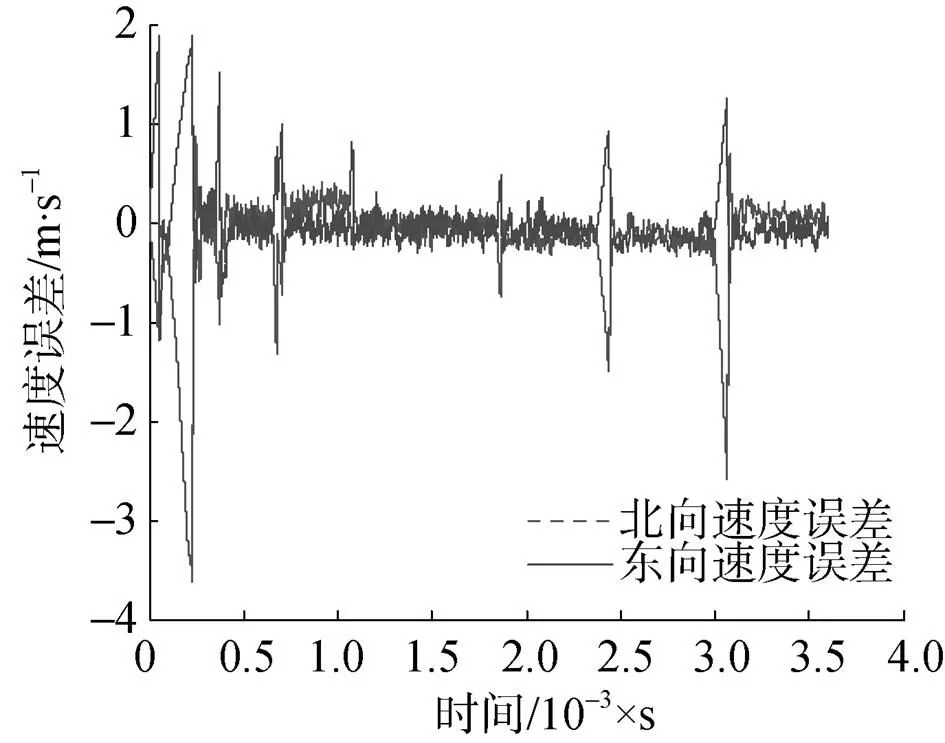
图3 自适应联邦滤波算法下速度误差曲线

图4 标准卡尔曼滤波算法下航姿误差曲线
4 结论
针对标准卡尔曼滤波由于噪声的统计特性与实际情况不相符而引起滤波误差增大的问题, 提出了一种新的在线估计系统噪声和量测噪声的自适应联邦滤波算法, 进一步通过仿真验证, 可以得到如下结论。
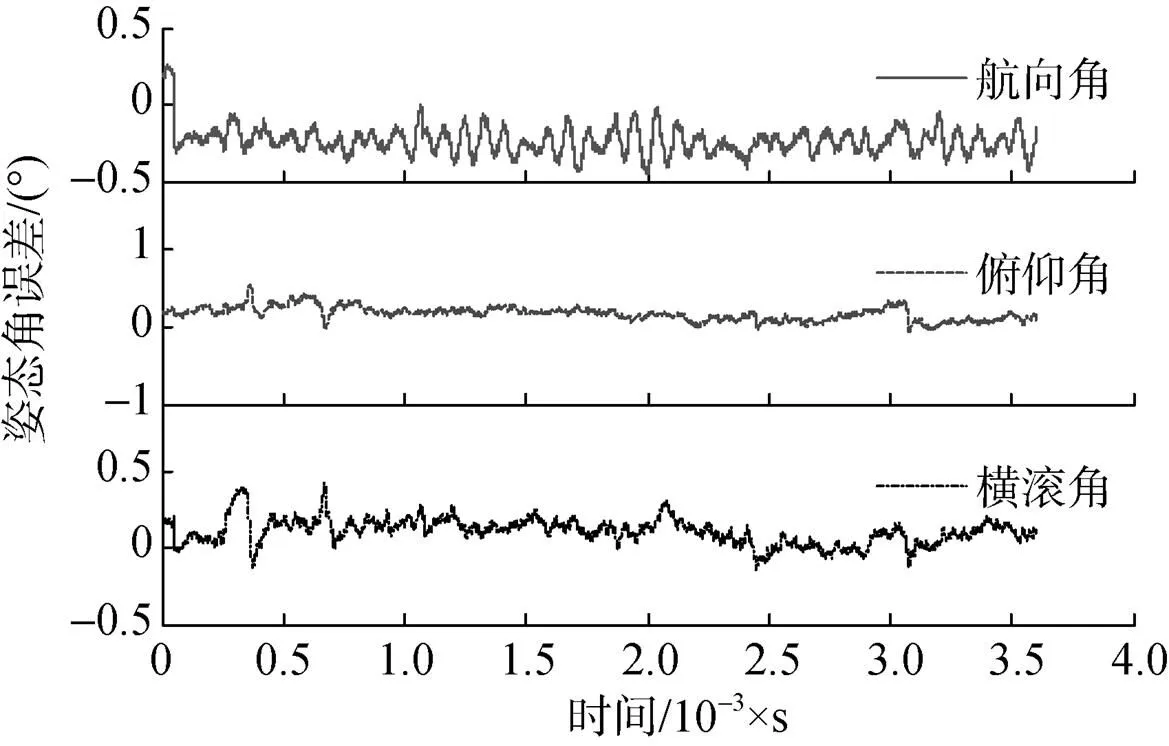
图5 自适应联邦滤波算法下航姿误差曲线
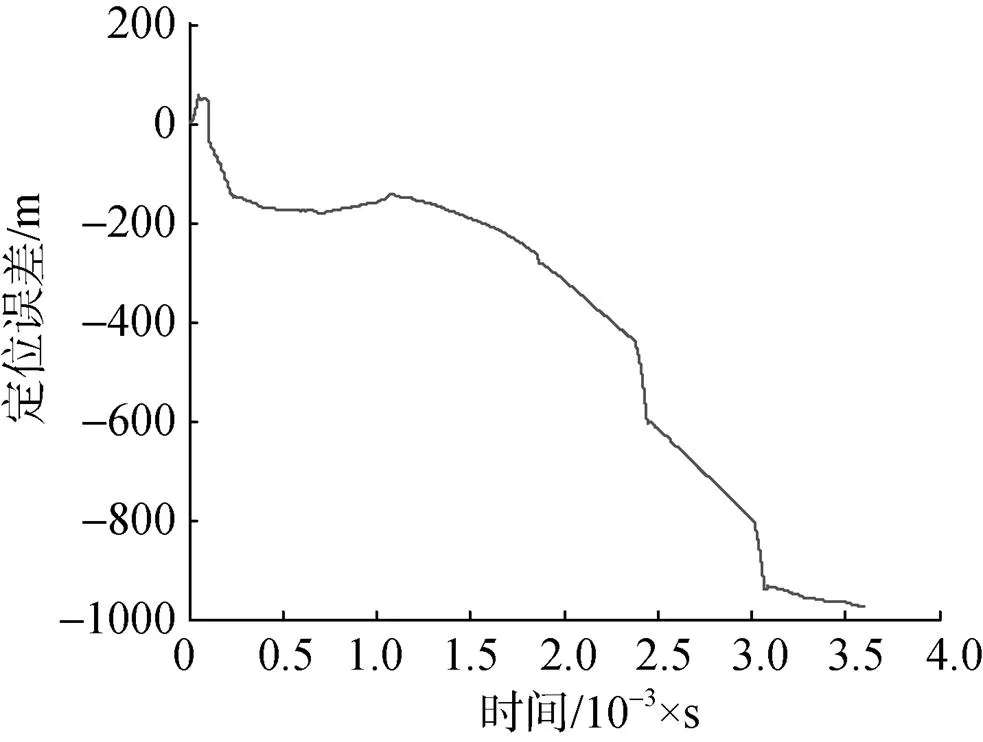
图6 标准卡尔曼滤波算法下定位误差曲线
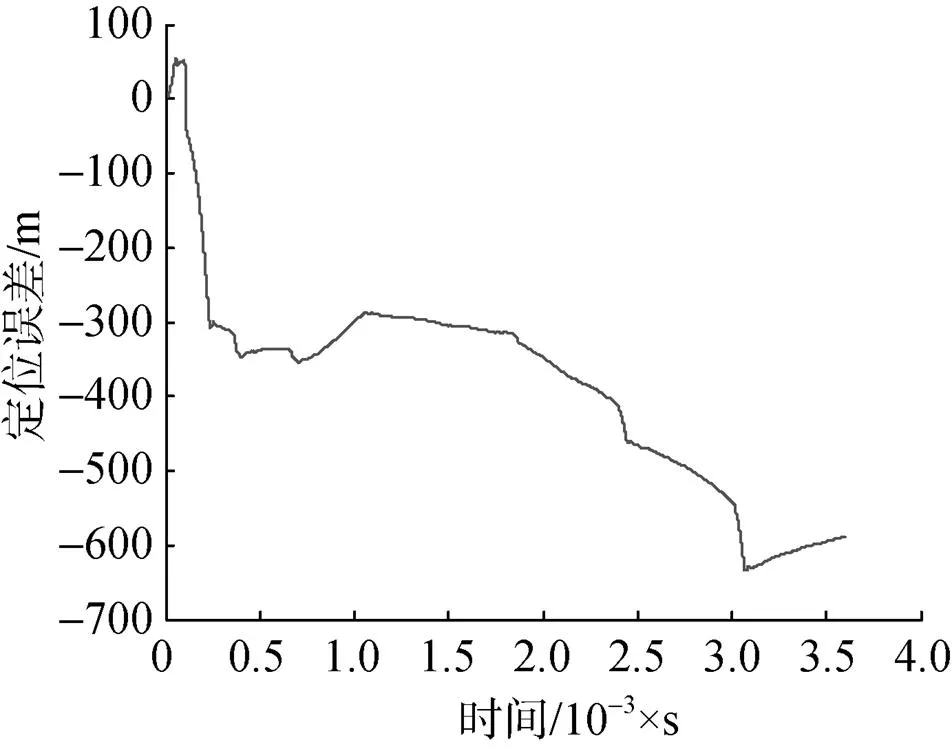
图7 自适应联邦滤波算法下定位误差曲线
1) 自适应卡尔曼滤波算法通过新息序列自适应量测噪声, 在噪声统计特性未知的情况下能进行滤波计算, 且在鱼雷导航定位仿真计算中的结果优于标准的卡尔曼滤波算法。
2) 采用两级分布式联邦滤波器设计。导航定位系统以捷联惯性导航为信息参考系统, 分别与雷载测速、磁航向计和在线估计雷速组成相互独立的子滤波系统, 其导航信息作为主滤波器的输入在主滤波器中完成时间和信息的更新以及融合, 输出精确的导航定位解算结果; 主滤波器能够对各子系统的输出进行检验分析, 结合鱼雷的航行弹道, 决定各子系统输出信息在信息融合算法中的权重。因此该导航定位系统具有定位精度高、工作稳定和容错能力强的特点。
3) 合理融合主滤波器及子滤波器信息, 使信息分配系数能够跟随局部滤波器的性能而改变,从而改变局部滤波器的估计信息在全局估计信息中所占的比例, 保证联邦滤波器整体的性能能够随时接近其中性能最优的局部系统,使鱼雷定位结果更加准确。
[1] 李建辰.鱼雷定位技术[M]. 北京: 国防工业出版社, 2009.
[2] 鲁平, 赵龙, 陈哲. 改进的 Sage-Husa 自适应滤波及其应用[J]. 系统仿真学报, 2007, 19(15): 3503-3505.Lu Ping, Zhao Long, Chen Zhe. Improved Sage-Husa Adaptive Filtering and Its Application[J]. Journal of System Simulation, 2007, 19(15): 3503-3505.
[3] 李旦, 秦永元, 梅春波. 组合导航自适应卡尔曼滤波改进算法研究[J]. 测控技术, 2011, 30(3): 114-116.Li Dan, Qin Yong-yuan, Mei Chun-bo. An Improved Adaptive Kalman Filter Algorithm for SINS/GPS Integra- ted Navigation System[J]. Measurement & Control Tech- nology, 2011, 30(3): 114-116.
[4] 卞鸿巍, 金志华, 王俊璞, 等. 组合导航系统信息自适应卡尔曼滤波算法[J]. 上海交通大学学报, 2006, 40(6): 1000-1004.Bian Hong-wei, Jin Zhi-hua, Wang Jun-pu, et al. The Innovation-Based Estimation Adaptive Kalman Filter Algo- rithm for INS/GPS Integrated Navigation System[J]. Jour- nal of Shang hai Jiaotong University, 2006, 40(6): 1000- 1004.
[5] 刘勇, 徐世杰. 基于联邦UKF算法的月球探测自主组合导航[J]. 宇航学报, 2006, 27(3): 518-530.Liu Yong, Xu Shi-jie. Autonomous Integrated Navigation for Lunar Probe Based on Federated UKF Algorithm[J]. Journal of Astronautics, 2006, 27(3): 518-530.
(责任编辑: 杨力军)
Application of Adaptive Federated Kalman Filter Algorithm to Multi-parameter Estimation for TorpedoNavigation and Positioning
CAO Meng, LI Jian-chen, GUO Lin-na, HUANG Hai, HONG Jian-ying
(1. The 705 Research Institute, China Shipbuilding Industry Corporation, Xi′an 710075, China; 2. Science and Technology on Underwater Information and Control Laboratory, Xi′an 710075, China)
Considering the particularity of torpedo underwater navigation, a new adaptive Kalman filter algorithm for torpedo multi-parameter estimation is presented for the purpose of torpedo navigation and positioning. Hence, the low filtering precision due to the uncertainty of the measurement noise′s statistical characteristics of Kalman filter in integrated navigation can be improved. This algorithm can conduct filtering calculation via measurement noise′s adaptive information with unknown statistical characteristics of noise. Moreover, a new adaptive information distribution strategy for information fusion is proposed. This distribution strategy can determine the information distribution coefficient of each sub-filter by making use of the estimated mean square error matrix, and make the variation of the coefficient depend on the optimal performance of the sub-filter at any time. Comparison between the simulations of the proposed algorithm and the normal Kalman filter algorithm verifies the effectiveness of the proposed algorithm.
torpedo; integrated navigation; adaptive federated Kalman filtering; information fusion; innovation
TJ630.33
A
1673-1948(2014)06-0420-05
2014-05-11;
2014-07-22.
海军科研资助项目(101100302-02).
曹 萌(1990-), 女, 在读硕士, 主要研究方向为武器系统与运用工程制导技术.
