双行星排式液驱混合动力汽车模式切换的协调控制*
2014-02-27彭宇君陈慧勇韩利伟曾小华宋大凤王庆年王继新
彭宇君,陈慧勇,韩利伟,曾小华,宋大凤,王庆年,王继新
(1.吉林大学,汽车仿真与控制国家重点实验室,长春 130025; 2.郑州宇通客车股份有限公司,郑州 450016;3.简式国际汽车设计(北京)有限公司,北京 102206; 4.吉林大学机械工程学院,长春 130025)
前言
双行星排式液驱混合动力汽车[1]可利用前行星排的作用实现整车需求转矩与发动机输出转矩的解耦和车速与发动机转速的解耦,使得发动机的工作更加灵活,通过将发动机调节在高效区工作,能大大改善整车的燃油经济性[2]。同时,后排的拉维娜氏结构增大了液压泵/马达的输出转矩,使车辆的动力性增强。
目前对混合动力汽车的研究主要集中在稳态的能量分配策略,通过合理分配和优化动力源的工作来达到节能减排的目的,对于混合动力汽车模式切换的动态过程的研究较少[3]。本文中研究的双行星排式液驱混合动力汽车具有发动机、液压泵/马达A和液压泵/马达B 3个动力源,在模式切换时动力源的需求转矩往往会发生很大的变化,但受到动力源响应特性的影响,在这个动态过程中可能会出现动力源总的输出转矩与总需求转矩不一致或者动力源总输出转矩发生很大变化等情况,从而影响了混合动力汽车的动力性和舒适性。由于混合动力汽车的工作模式会经常改变,动态性能也是评价混合动力汽车品质的重要指标。
至今还没有统一的标准对混合动力汽车的动态效果进行评价,一般须考虑模式切换时的动力性、舒适性和耐久性等[3]。本文中采用冲击度作为评价模式切换时的性能指标,冲击度j是指车辆纵向加速度的变化率,各个国家对冲击度的量化指标也有所差别[4],德国的推荐值为|j|≤10m/s3,我国的推荐值为|j|≤17.64m/s3。
1 双行星排式液驱混合动力汽车特性分析
本文中研究的双行星排式液驱混合动力汽车结构如图1所示。在前排中,发动机与行星架相连,液压泵/马达A与太阳轮相连,齿圈与后排行星架相连。后排为复合式的拉维娜氏结构,液压泵/马达B与大太阳轮相连,通过离合制动器C1锁死小太阳轮或者离合制动器C2锁死齿圈,得到两个不同的传动比,整车的转矩从后排行星架输出。
根据该双行星排式液驱混合动力汽车结构特点,其运行模式如表1所示。
1.1 动力源响应特性研究
动力源的响应特性是影响混合动力汽车动态性能的主要原因,因此,下面首先研究动力源的响应特性。
1.1.1 发动机响应特性研究
受到发动机转动惯量和热状态改变等因素的影响,发动机的动态性能与其稳态时的性能有较大差异。对发动机实时转矩的正确估计是实现动态协调控制的前提和难点[3]。
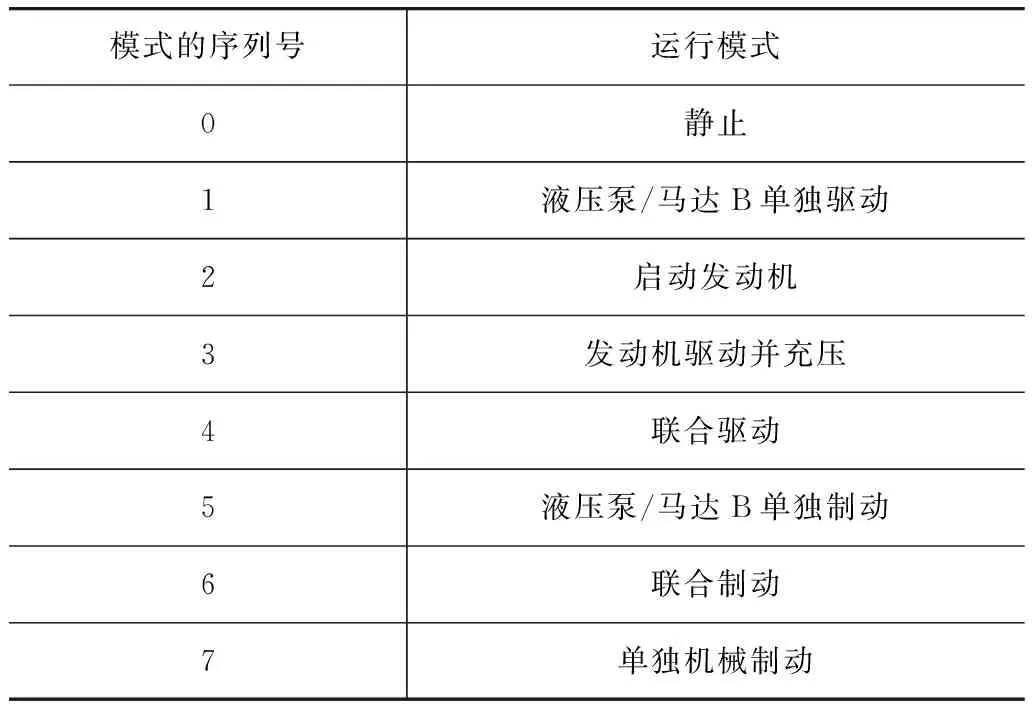
表1 双行星排式液驱混合动力汽车运行模式
1阶惯性环节的传递函数为
式中:τ为时间常数,s;s为拉氏复变量。
本文中将发动机的动态特性视为1阶系统,时间常数定为1s[5],故在动态情况下发动机的实时输出转矩为
(1)
对于行星排这种特殊的构型,发动机传递到前排齿圈的转矩还可通过液压泵/马达A的转矩得到[6]:
假设前行星排中齿圈与太阳轮的齿数比为k,则发动机的转矩Te分配到液压泵/马达A轴上的转矩Tp_axis和分配到前排齿圈轴上的转矩Tr_axis满足关系式:
(2)
(3)
而液压泵/马达A的实时转矩可通过其流量、转速和出口压力等参数估计,根据式(2)和式(3)可得到动态情况下发动机的转矩和传递到前排齿圈的实际转矩。
1.1.2 液压泵/马达响应特性的研究
液压泵/马达A与液压泵/马达B均采用斜盘式轴向柱塞泵/马达结构,满足四象限工作特性,通过改变斜盘的倾角来控制液压泵/马达输出转矩的大小和方向。在液压泵/马达启动和关闭的过程中,受到液压油温度、黏度和管路材料等因素的影响,液压泵/马达的输出转矩不能达到稳态时的数值。同理,将液压泵/马达的动态输出转矩视为1阶系统[7],考虑到排量对响应时间的影响,将液压泵/马达B的时间常数定为0.2s;液压泵/马达A的时间常数定为0.1s,则液压泵/马达B的实际输出转矩为
(4)
液压泵/马达A的实际输出转矩为
(5)
1.2 拉维娜氏齿轮机构特性分析
本文中所用的拉维娜氏齿轮参数:大太阳轮齿数rs1=34;长行星轮齿数rp1=32;小太阳轮齿数rs2=30;短行星轮齿数rp2=20,齿圈齿数rr0=98。定义两个特征参数K1和K2分别为
(6)
拉维娜氏结构满足以下关系式:
(7)
式中:ω1、ω2、ω3、ω4分别为齿圈、行星架、大太阳轮和小太阳轮的角速度;T1、T2、T3、T4分别为齿圈、行星架、大太阳轮和小太阳轮上作用的转矩。
用双曲正切函数代表离合制动器的制动力:
(8)
式中:Tdry为离合制动器的制动力;Cmd为制动信号的大小,位于0和1之间;fslip为制动器能提供的最大制动转矩;ωrel为制动器与轴的相对角速度;dvel为制动器与轴的临界角速度。
若锁死齿圈,松开小太阳轮,则有ω1=0,T4=0,代入式(7)可得
(9)
若锁死小太阳轮,松开齿圈,则有ω4=0,T1=0,代入式(7)可得
(10)
由上述分析可知,拉维娜氏结构通过离合制动器C1对小太阳轮的锁死作用或离合制动器C2对齿圈的锁死作用可得到两个不同的传动比。
2 双行星排式液驱混合动力汽车模式切换的协调控制
2.1 双行星排式液驱混合动力汽车模式切换的动力学分析
双行星排式液驱混合动力汽车的动力学模型如图2所示。
在考虑整车运行模式时,不考虑拉维娜氏结构速比的切换,可将拉维娜氏结构简化为一个固定速比il,图中,Te,ωe和Je分别为发动机的输出转矩,角速度和转动惯量;Tm,ωm和Jm分别为液压泵/马达B的输出转矩,角速度和转动惯量;Tp,ωp和Jp分别为液压泵/马达A的输出转矩,角速度和转动惯量;Tl_c为液压泵/马达B作用于拉维娜氏行星架上的转矩;Tring和ωring分别为前排齿圈上作用的转矩及其角速度;Tc为从拉维娜氏行星架上输出的总转矩;Tt_r为转换到拉维娜氏行星架上的外界阻力矩;ωl_j为拉维娜氏行星架的角速度;Jt_o为包括主减速器、车轮与整车质量折合到拉维娜氏行星架上的等效转动惯量。
系统运动的微分方程式:
(11)
双行星排的结构满足方程式:
(12)
式中:rr为车轮滚动半径;i0为主减速器速比。
将式(12)代入式(11)可得加速度a和冲击度j为
(14)
由于车辆模式切换时间很短,可认为在这个过程中车辆的需求转矩不变,即
dTt_r/dt=0
(15)
将式(15)代入式(14)可得
(16)
由式(13)可知,车辆在模式切换时的动力性取决于从拉维娜氏行星架上输出总转矩的大小,而根据式(16),整车的冲击度取决于从拉维娜氏行星架上输出总转矩的变化率。要使车辆在模式切换时有良好的动力性和舒适性,须协调控制3个动力源的输出转矩,使从拉维娜氏行星架上输出的总转矩尽量满足总需求转矩的要求且不发生大的变化。
2.2 液压泵/马达B单独驱动模式向发动机单独驱动并充压模式切换的协调控制
在液压泵/马达B单独驱动模式时,随着蓄能器压力的降低,液压泵/马达B无法提供足够的转矩来驱动车辆,此时液压泵/马达A会启动发动机,使发动机参与驱动。通过液压泵/马达A的作用把发动机带到怠速转速,然后开始给发动机供油,但在发动机开始供油的一段时间,受发动机响应特性的影响,发动机实际输出的转矩值还达不到其需求值,而液压泵/马达B在关闭的过程中,输出的转矩下降很快。在这个动态过程中,会出现从拉维娜氏行星架上输出的总转矩值与总需求转矩不一致的情况,从而影响整车动态情况时的动力性,而且从拉维娜氏行星架上输出的总转矩可能会发生大的变化,从而产生大的冲击。这个动态过程可通过液压泵/马达B的转矩补偿作用来弥补拉维娜氏行星架上不足的转矩,从而提高车辆模式切换时的动力性并减小冲击度,协调控制的流程图如图3所示。

2.3 发动机单独驱动并充压模式向液压泵/马达B单独驱动模式切换的协调控制
在发动机单独驱动并充压模式中,当蓄能器的压力升高到某一值时,若需求转矩不大,会进入液压泵/马达B单独驱动模式。此时如果立刻让液压泵/马达A停止工作,因其响应时间比发动机快很多,在这个动态过程中Te≥(k+1)Tp,根据:
(17)
可知,在发动机关闭的过程中,发动机的转速会升高,出现“飞车”的情况。而在液压泵/马达B单独驱动模式,发动机仍以很高的转速空转,对发动机和整车的寿命都会有影响。而且,如果液压泵/马达A立刻关闭,会使得从前排齿圈上输出的转矩减小很快,而液压泵/马达B在启动的短时间内输出转矩还不稳定,也会出现动力不足和冲击的现象。
在这个动态过程中,如果进入液压泵/马达B单独驱动模式后,液压泵/马达A不立即关闭,而是合理控制其输出转矩,不但能使发动机平缓退出工作,也能减小前排齿圈上转矩的变化,使得从拉维娜氏行星架上输出的总转矩不发生大的变化,提高车辆动态时的动力性,减小冲击。协调控制的流程图如图4所示。
图中pm_d为进入液压泵/马达B单独驱动模式时,要求蓄能器具有的最低压力;Treq为要求的从拉维娜氏行星架输出的总转矩值;Tm_max为液压泵/马达B单独驱动模式时的最大输出转矩;ωe_r为发动机的需求角速度。
2.4 拉维娜氏齿轮机构高、低速模式切换时的协调控制
2.4.1 高、低速模式切换条件的确定
车速较低时,选择大的传动比i1能使车辆有更好的加速性能。车速较高时,选择大的传动比i1可能会使液压泵/马达B的转速超过其最高允许转速,故此时应选择小的传动比i2。由于液压泵/马达B的最高转速为3 900r/min,如果选用大的传动比i1,对应的最高车速vmax为
(18)
选择在车速达到8m/s时,由大传动比i1切换到小传动比i2,进入高速模式;当车速下降到6m/s时,由小传动比i2切换到大传动比i1,进入低速模式。
2.4.2 高、低速模式切换时两个制动器的协调控制
在拉维娜氏结构进行速比切换时,须协调控制两个离合制动器的动作,使从拉维娜氏行星架上输出的转矩不发生大的变化,确保车辆在速比切换时的动力性和舒适性。制动器的输出转矩主要取决于它所能传递的最大制动转矩、控制信号的大小和制动器与轴的相对转速。由于制动器能传递的最大制动转矩由制动器的参数决定,选定之后不能改变,而控制制动器与轴的相对转速,比较复杂,选择通过控制制动器的制动信号来调节制动器的制动力大小。
对离合制动器的控制通过控制离合器接合和分离的时间常数来实现。
3 仿真分析
利用AMESim、Matlab/simulink软件和Matlab/stateflow搭建双行星排式液驱混合动力汽车的联合仿真模型,对模式切换的动态过程进行仿真验证。
3.1 液压泵/马达B单独驱动模式向发动机单独驱动并充压模式切换的仿真分析
图5为由液压泵/马达B单独驱动模式向发动机单独驱动并充压模式切换时未经过协调控制的仿真曲线。图中模式1为液压泵/马达B单独驱动模式,模式2为启动发动机模式,模式4为发动机单独驱动并充压模式。可以看出,在动态切换的过程中,动力源实际输出的转矩不能很好地跟随需求转矩,出现了动力不足的情况,且由于总输出转矩变化很快,产生了较大的冲击,最大冲击度为10.3m/s3。图6为由液压泵/马达B单独驱动模式向发动机单独驱动并充压模式切换时经过协调控制后的曲线,从图6中可以看出,在这个动态过程中,通过液压泵/马达B的转矩补偿作用,动力源总输出转矩能较好地跟随总需求转矩,且未发生大的变化,冲击度明显下降。在液压泵/马达B关闭时会有一定冲击,但最大冲击度也只有1.5m/s3。图7为有无协调控制时液压泵/马达B输出转矩的比较。
3.2 发动机单独驱动并充压模式向液压泵/马达B单独驱动模式切换的仿真分析
图8为由发动机单独驱动并充压模式向液压泵/马达B单独驱动模式切换时未经过协调控制的仿真曲线。可以看出,在发动机关闭的过程中,由于发动机的输出转矩大于液压泵/马达A作用于发动机的转矩,使得发动机的转速升高,出现了发动机“飞车”的情况,而且由于在这个动态过程中,液压泵/马达B的输出转矩不稳定,使动力源总输出转矩与总需求转矩不一致,动力性下降,最大冲击度为-0.6m/s3。图9为经协调控制后的仿真曲线,可以看出,通过在发动机关闭的过程中合理控制液压泵/马达A的输出转矩,避免了发动机“飞车”的情况,而且动力源总输出转矩能较好地跟随总需求转矩,最大冲击度为0.05m/s3,动力性和舒适性都得到改善。
3.3 拉维娜氏结构高、低速模式切换的仿真验证
图10为在液压泵/马达B单独驱动模式时拉维娜氏结构由低速模式切换到高速模式的仿真曲线。模式0代表低速模式,为锁死齿圈,松开小太阳轮的情况。可以看出,通过合理控制两个离合制动器的分离和接合动作,在由低速模式向高速模式切换时,整车最大的冲击度为9.6m/s3,满足冲击度小于17.64m/s3的舒适性指标,且动力性下降不大。图11为在液压泵/马达B单独驱动模式时,拉维娜氏结构由高速模式向低速模式切换的仿真曲线,整车最大冲击度为10.3m/s3,且动力性下降不大。
4 结论
针对双行星排式液驱混合动力汽车,分析了动力源的响应特性,建立了双行星排式液驱混合动力汽车的动力学分析模型,指出整车在模式切换时的动力性和冲击度分别取决于从后排拉维娜氏行星架上输出总转矩的大小和变化率。利用AMESim软件和Matlab/simulink/stateflow搭建了双行星排式液驱混合动力汽车的仿真模型进行仿真。结果表明,采用协调控制后,车辆在模式切换时的动力性和冲击度都得到有效改善,系统工作更合理。拉维娜氏结构高、低速模式切换时能满足预期的动态指标。
参考文献
[1] 吉林大学.双行星排式液驱混联式混合动力系统:中国,201020263421.0[P].2011-04-06.
[2] Jerome Meisel. An Analytic Foundation for the Toyota Prius THS-II Powertrain with a Comparison to a Strong Parallel Hybrid-Electric Powertrain[C]. SAE Paper 2006-01-0666.
[3] 王伟华.并联混合动力汽车的控制[D].长春:吉林大学,2006.
[4] 郭立书.电控机械式自动变速器换挡过程控制[J].农业机械学报,2003,34(2):2.
[5] 何忠波,白鸿柏,张培林,等.发动机动态特性及其对车辆换档特性的研究[J].军械工程学院学报,2005,17(5).
[6] 童毅.并联式混合动力系统动态协调控制问题的研究[D].北京:清华大学,2004.
[7] 王孙安,史维翔,高孟田,等.泵控马达响应特性的研究[J].机床与液压,1992(1).
