缆系海底观测网远程电能监控系统
2014-02-18周怀阳岳继光
吕 枫,周怀阳,岳继光,何 斌
(1.同济大学 海洋与地球科学学院,上海200092;2.同济大学 电子与信息工程学院,上海201804)
缆系海底观测网是近年来国际上提出的海洋科学基础设施,其主要由海岸基站、光电复合通信海缆、水下基站和观测平台等组成.缆系观测网的设计寿命通常在25年左右,受该类海缆长期绝缘性能的限制,其直流输电电压通常为-10kV以内,而海缆总长可达数千公里,因此可覆盖较大范围的海底区域.相对于传统的船基科考方式,缆系观测网可将较为充裕的电能从陆地持续输送给分布在海底的大量科学仪器,因此可大大扩展海洋科学观测的时空尺度[1-2].
由于体积受限和可靠性考虑,缆系观测网采用的海缆及其分支单元(branching unit,BU)中无法安装遥测和遥信模块,因此其相对陆地电网具有较低的可观测性,而特殊的地理位置又使其具有较低的可达性,导致维修周期很长.为提高观测网的用能效率和运行可靠性,须从系统设计、运行模式和控制方式等方面综合考虑,针对其物理架构特点设计远程电能监控系统(power monitoring and control system,PMACS),实现类似陆地电网中能量管理系统(energy management system,EMS)以及监控与数据采集系统的相关功能[3-4].
当前国内外有关缆系观测网的研究尚处在起步阶段,特别是针对其远程电能监控技术的研究较少且无系统.国外主要是美国华盛顿大学初步研究了观测网的相关电能监控方法[5-7],针对早期提出的采用自治式BU的观测网方案.国内主要是浙江大学和同济大学等单位初步研究和开发了PMACS控制器相关软硬件[8-9],但文中尚未涉及系统层面的研究.本文设计了观测网PMACS的总体结构,介绍了数据采集、负载管理和网络分析三个子系统的主要功能和相互关系,研究了时间同步方案、供电优化策略以及状态估计和故障定位等网络分析方法,可为未来国家海底观测网的设计和运行提供参考.
1 缆系观测网PMACS的总体结构
在缆系观测网中,海岸基站内的高压直流远供设备(power feeding equipment,PFE)将陆地电网提供的工频交流电能变换为恒定电压的高压直流电能后,通过主干海缆、BU和分支海缆输送给各个水下基站.水下基站内的高压直流变换器将该高压输电电能(通常为-2~-10kV)降压变换为观测设备适配器(science instrument interface module,SIIM)所需的中压配电电能(通常为300~400V),再由SIIM将中压电能降压变换为观测设备(science instrument,SI)直接可用的低压电能(通常为48V以内).因此,缆系观测网的物理架构如图1所示.在实际工程中,须按照可靠性和经济性的原则,根据海底观测区域的具体范围和环境特点,合理选择链式、环式、两端供电式或网型等拓扑结构.
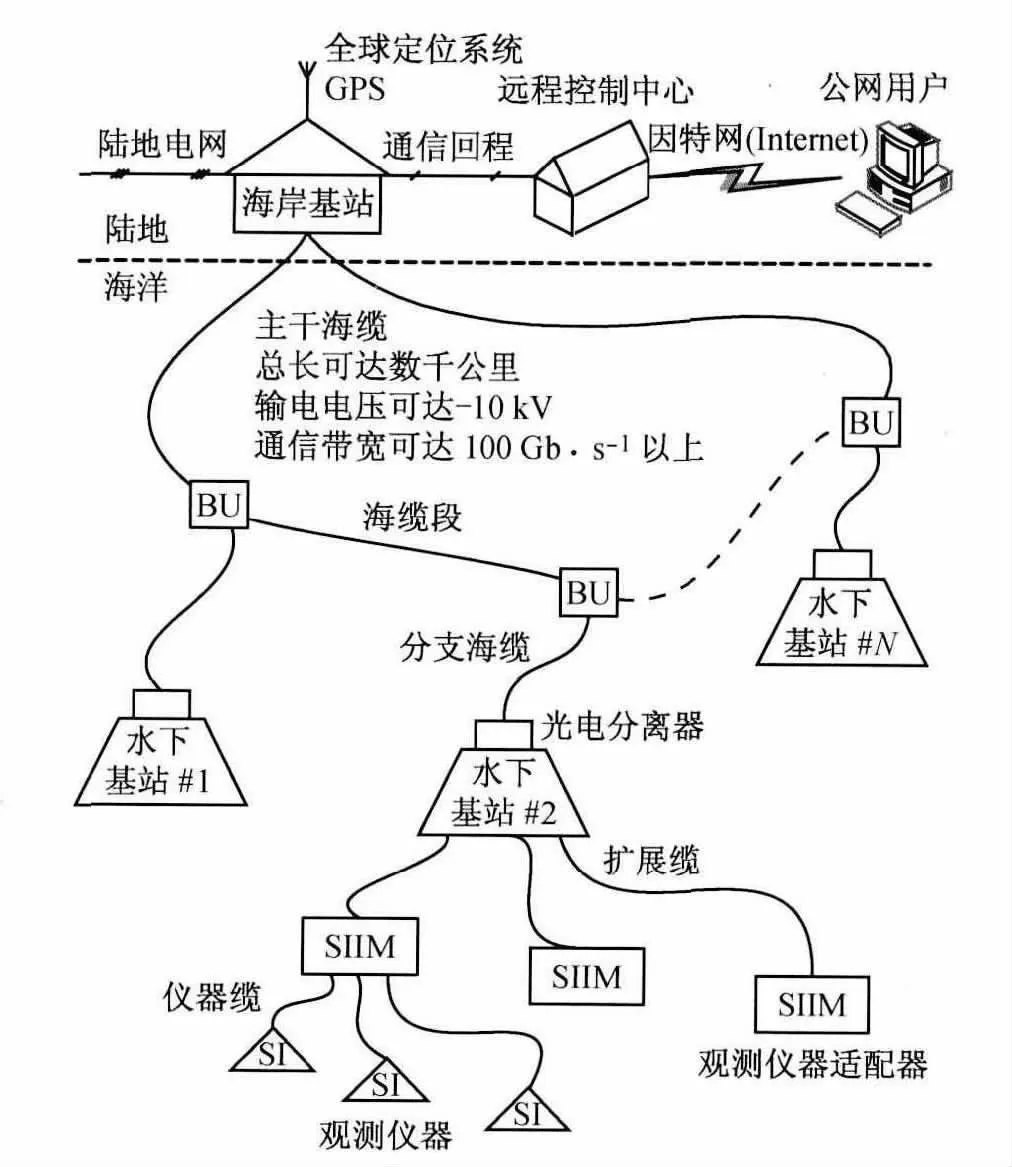
图1 缆系海底观测网的物理架构Fig.1 Physical structure of cabled seafloor observatory networks
PMACS的核心功能是海底电力系统的远程监测、分析与控制.PMACS采集的数据有海岸基站、水下基站和SIIM的供电状态(包括电压值、电流值和开关状态),以及各海底设备内部的多点温度值、湿度值和压力值等环境参数.PMACS根据采集的电力系统状态数据,结合海底电网实际数学模型,通过状态估计和故障定位等网络分析功能,估计运行状态、预测运行趋势和提供运行对策,并控制所有内部负载和外部负载的供电,从而提高观测网的用能效率和运行可靠性.
从结构上看,PMACS可采用三层客户端/服务器模型:底层为水下基站和岸基PMACS控制器,负责采集相应的观测网电力系统运行状态数据,并执行PMACS服务器发布的控制指令;中间层为PMACS服务器,负责管理和存储观测网电力系统的运行状态参数,并发布PMACS控制台的控制命令;顶层为PMACS控制台和客户端,负责从PMACS服务器获得观测网电力系统的运行状态数据,此外通过PMACS控制台可发送控制指令.观测网PMACS的总体结构设计如图2所示.图中,HVDC表示高压直流(high voltage direct current),UTC表示协调世界时(universal time coordination).
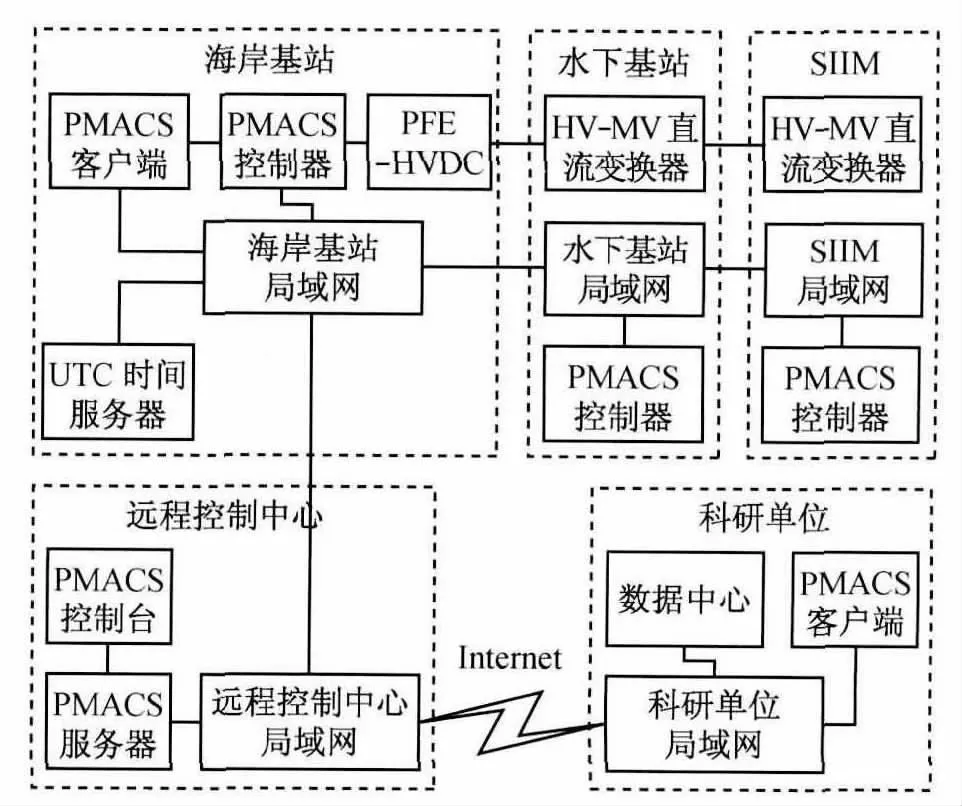
图2 PMACS的总体结构Fig.2 Overall structure of the PMACS
从功能上看,PMACS可分为数据采集子系统(data acquisition subsystem,DAS)、负载管理子系统(load management subsystem,LMS)和网络分析子系统(network analysis subsystem,NAS),相互关系如图3所示.DAS是PMACS和观测网物理系统的接口,为LMS和NAS实时采集电力系统状态数据,并向电力系统发送控制信号;LMS利用DAS提供的观测网电力系统实时数据执行PMACS调度决策,向DAS发送电力系统控制指令,并向NAS发送负载供电状态数据,同时获得满足电力系统安全约束的供电限制值;NAS利用DAS和LMS提供的观测网电力系统信息进行电网分析与辅助决策,向DAS发送量测质量信息,并向LMS提供负载供电限制值.
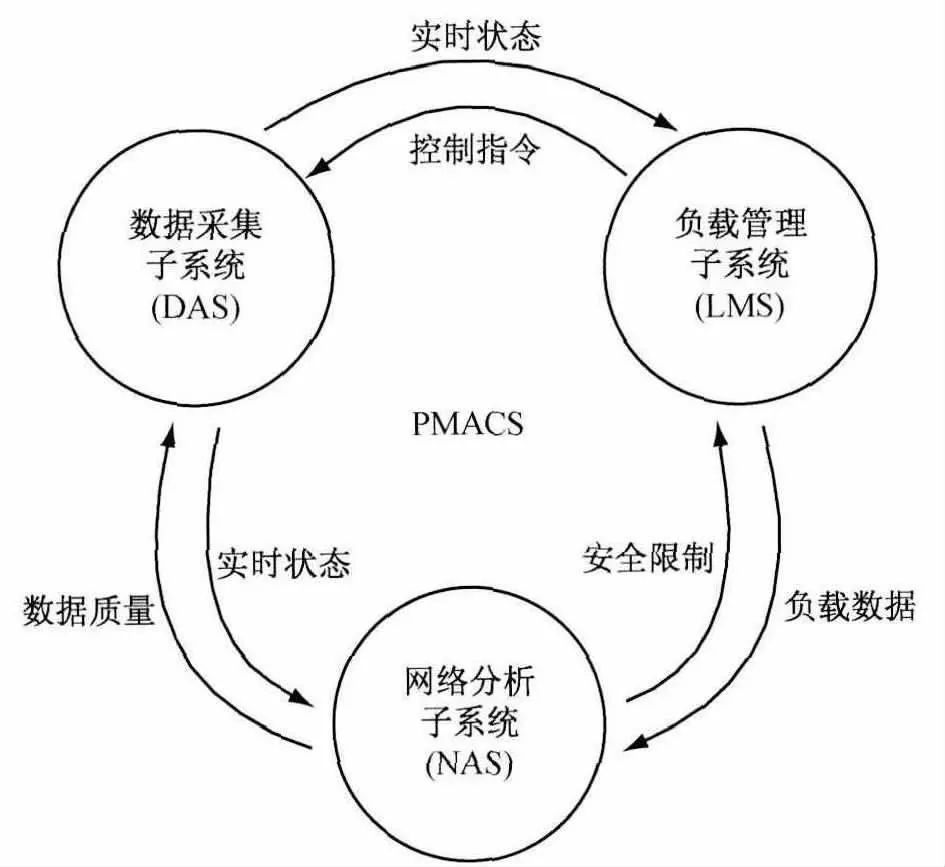
图3 PMACS三个子系统关系图Fig.3 Diagram of the PMACS’three subsystems
2 数据采集
PMACS数据库中存储的数据类型主要有电网参数、实时数据和历史数据.电网参数主要为各海缆段的长度及其单位长度海缆参数、海底电网的拓扑结构以及所有保护和报警阈值等.实时数据主要为各开关状态量以及电压值和电流值等模拟量,由PMACS控制器测量后通过海底光纤通信系统发送到DAS.
采样时刻是电力系统状态数据的重要属性,PMACS需要同一时间断面的测量数据,才能有效地分析海底电网的实际状态.陆地电力系统的各量测单元通常可采用全球定位系统(global positioning system,GPS)的卫星信号实现时间同步,而观测网中只有岸基可接受GPS信号,因此将时间服务器设置在岸基内,而控制器、服务器和控制台/客户端之间采用网络对时方式实现时间同步,可采用的时间同步协议主要有网络时间协议(network time protocol,NTP)和 IEEE 1588 等精确时间协议(precision time protocol,PTP).其中,NTP 的授时精度可达数十毫秒,PTP的授时精度可达微秒级,而实际精度与同步源和网络路由有关.PMACS的授时方案如图4所示,其中所有设备统一采用世界协调时(universal time coordinated,UTC).授时周期一般以小时为单位,而在两次授时之间,PMACS控制器可采用高稳定时钟芯片结合恒温晶振实现高精度守时.
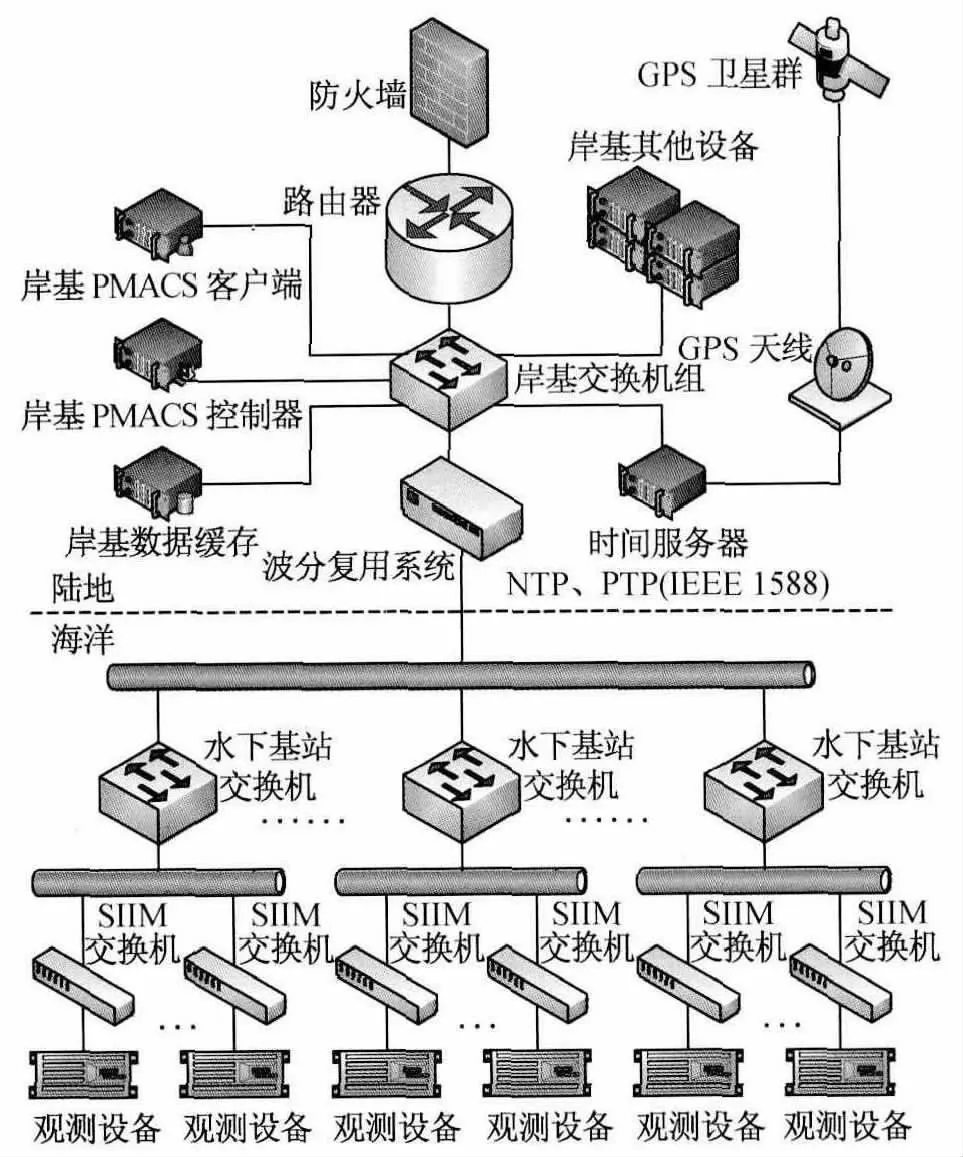
图4 PMACS的授时方案Fig.4 Time-synchronization scheme of the PMACS
3 负载管理
PMACS通过LMS控制各级负载的供电通断,调节岸基PFE的输出电压,并将各状态量与其阈值相比较,超过其阈值则代表观测网电力系统出现过压、过流和过温等异常状态,需要发出警告或发布相应的控制指令.
由于海缆总长较长,必须考虑海缆上的电压损耗与功率损耗.为确保观测网电力系统稳定,并尽可能多地输送电能到海底,若岸基PFE的最高输出电压为USS,则海底变换器正常工作的输入电压UUS的范围约为0.5USS~USS[10].因此,LMS的执行结果需要确保所有水下基站的输入电压满足该限制条件.假设PFE的输出功率和海缆的载流能力不是限制因素,则观测网的帯载能力主要由PFE的输出电压、电网拓扑和海缆电阻决定.
随着观测网的扩展和负载量的增加,或当部分海缆段因故障被隔离后造成电力系统帯载能力降低时,可能会导致其带载运行时无法满足稳定性约束.为高效利用观测网的有限电能,并尽可能地覆盖较广的海底观测区域,需要为LMS合理设计负载管理策略,其基本运行流程图如图5所示.
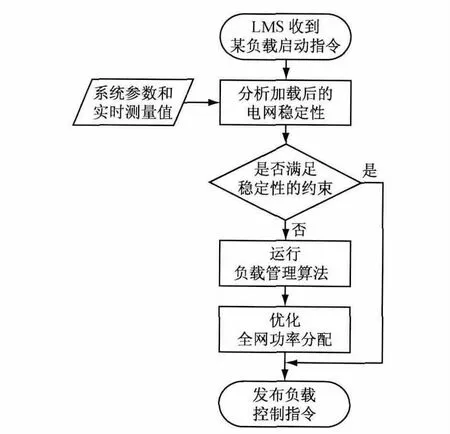
图5 LMS的运行流程图Fig.5 Operational flow chart of the LMS
PMACS的负载管理本质上是非线性优化问题.陆地EMS的负载管理通常采用基于成本和效益优化的方法[11],而观测网的总体目标是利用有限的电能满足尽可能多的科学需求,因此LMS的目标是在满足电力系统稳定性约束的前提下优化海底负载的功率供给,可将所有海底负载设置为若干优先级,优先满足高优先级的负载供电.基于这种思路,文献[12]提出了基于序列二次规划的负载管理算法,将负载优先级处理为优化目标函数的权重值,优化目标为确保观测网提供的功率尽可能满足负载功率需求和电力系统稳定性约束,较为有效地解决了负载管理问题.
当某个海底观测区域出现地震、风暴潮或火山喷发等重要科学现象时,可增加该处高优先级负载占总功率的比例,实现电能的灵活分配.
4 网络分析
PMACS的NAS主要包含状态估计、模型修正和故障定位等功能模块.NAS采用的电力网络静态模型由海底电网拓扑和各段海缆阻值决定.假设观测网有N个分支节点,且以流入水下基站的电流方向为正,则其电网数学模型可用节点电压方程表示为I=Y·U,展开为
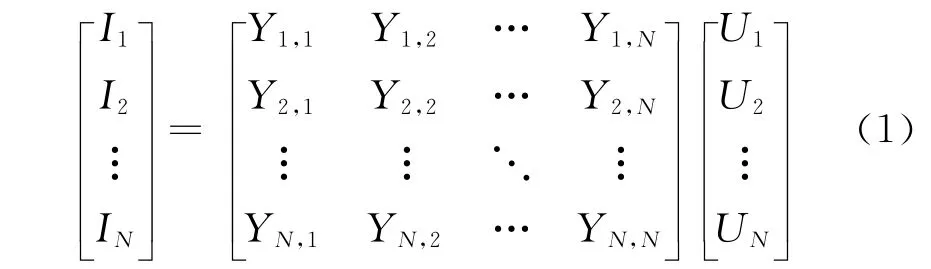
式中:I为节点电流向量;U为节点电压向量;Y为节点导纳矩阵;N为节点数.
4.1 状态估计
由于系统存在测量误差和数据丢包,观测网实时数据库内的运行状态数据可能不精确或不齐全.为建立可靠而完整的数据库,除了从硬件上提高测量单元的精度,从软件上可采用状态估计技术.
加权最小二乘法(weighted least square,WLS)算法是电力系统状态估计的经典算法,其程序简单、收敛性好、估计质量高,但计算量大、使用内存多、计算时间长.虽然观测网的覆盖范围较广,但与陆地电力系统相比,其节点数相对较少(通常为数十个以内),因此可采用 WLS算法进行状态估计[13].
在缆系观测网中,可观测量为水下基站测量所得的电压向量UUS和电流向量IUS以及岸基测量所得的电压向量USS和电流向量ISS,假设待估计量为BU节点处的电压向量UBU,可建立可观测量与待估计量的联系为xm=H·x,展开得:
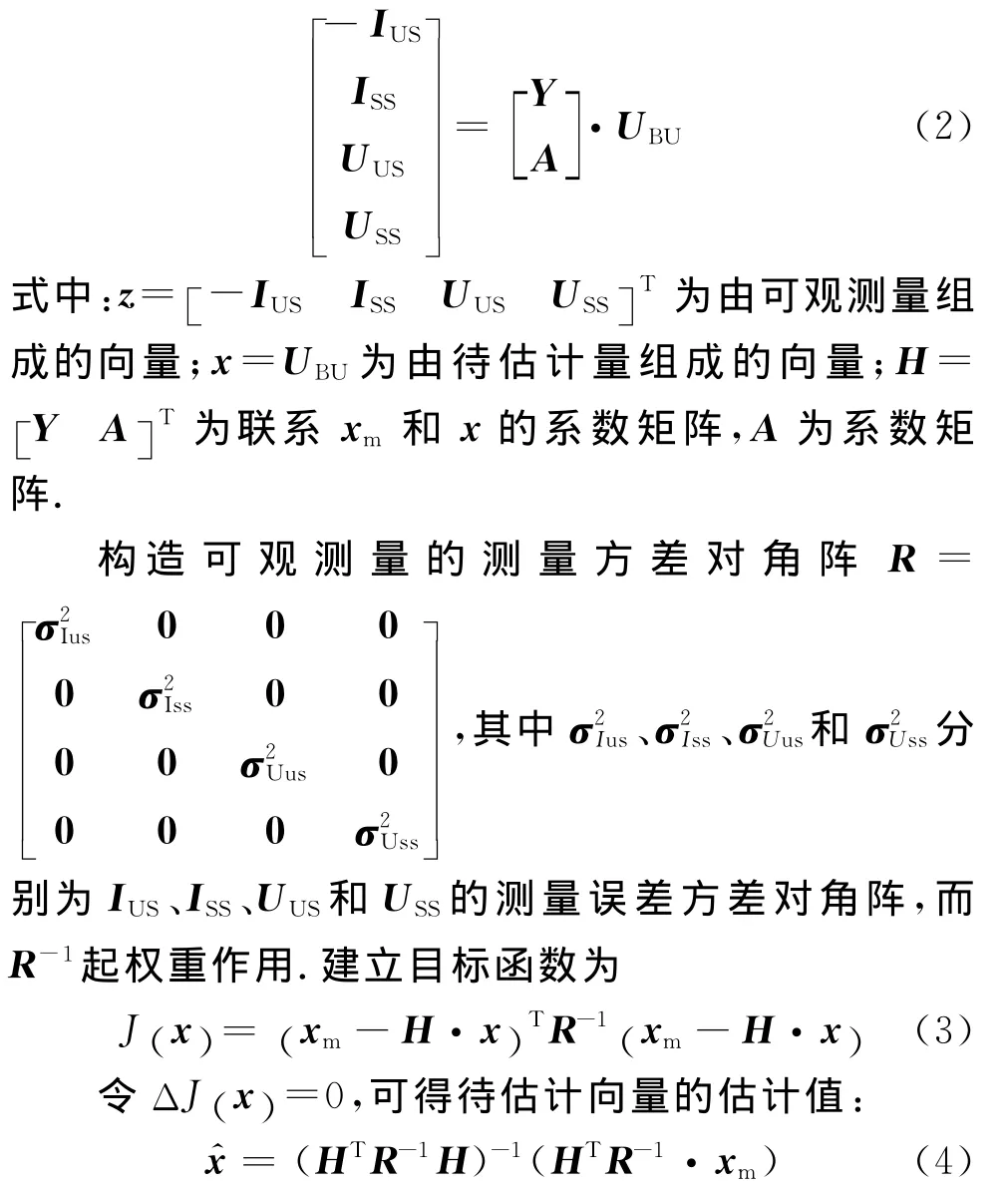
式(4)扩展后即为BU节点电压向量的状态估计公式:
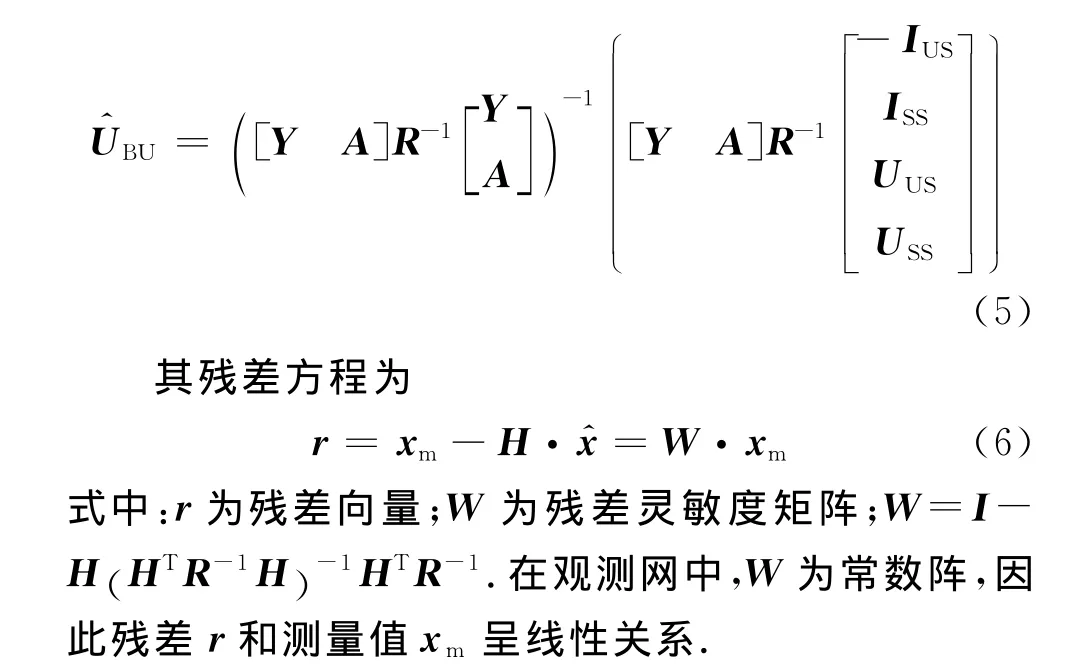
若DAS采集的数据中存在粗差,可采用加权残差法或标准化残差法进行检测和辨识,排除粗差后重新进行状态估计,或采用抗差WLS算法实现对测量粗差的直接抑制[14].
4.2 模型修正
PMACS采用的电网模型由各海缆段等效串联电阻组成的向量R和各BU内部的开关状态组成的矩阵S决定.在设计阶段,电网模型采用设计拓扑和海缆制造商提供的标称参数值R0.在运行阶段,海缆的实际参数值R1会随着周围环境的变化而变化,因此可能导致R0与R1之间存在较大的误差.若不更新电网参数,可能造成状态估计和故障定位等模块的分析结果精度下降,从而降低观测网的运行可靠性和提高海缆维修巡检的成本.

假设原电力网络模型为
总体上看,深海水温较为稳定,而浅海水温波动较大,如位于杭州湾口外东海内陆架的小衢山试验站测得该处海水年温度变化可高达25℃左右[15].由于铜导体的典型温度系数约为0.4%·℃-1,若环境温度变化25℃,则海缆阻值变化约10%.
陆地EMS系统中的参数估计算法主要有残差灵敏度分析方法和增广状态向量方法[16].而在观测网中的某段海缆参数发生较大变化后,会在测量值中反映,造成稳定的误差.由电网模型可得,节点p和节点q的注入电流分别为
式中:Ypq为节点p和q之间的电导;Up为节点p的电压,其他类推.
可得该段海缆的等效电导变化量ΔYpq为
观测网电力系统运行拓扑由所有BU的开关状态决定.通常每个电切换型BU的原理结构可等效为S1、S2和S3三个继电器,如图6所示.每个继电器均有闭合、断开和接地三种状态,用于隔离存在故障的海缆段或水下基站,观测网可通过这种海缆分段继电保护方式来提高容错能力.
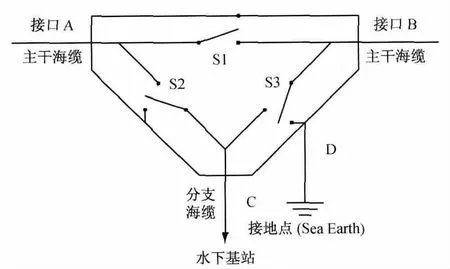
图6 电切换型分支单元的简化等效结构Fig.6 Simplified equivalent structure of the branching units with power switching
由于体积受限和可靠性考虑,BU无继电器状态反馈功能,因此PMACS无法分析实时结线.当某个BU存在故障时,其继电器的实际状态可能与其预期状态不一致,从而可能导致海底电网的实际拓扑与预期拓扑不一致,从而危害观测网的运行可靠性.
假设BU内所有继电器闭合为预期状态(正常状态),则当三个继电器中有一个继电器发生误开故障且不接地时,为良性故障.良性故障不影响观测网的正常运行,也未改变电网拓扑结构.当BU内三个继电器中至少有两个继电器发生误开故障且不接地时,为功能故障,如图7所示.功能故障通常会影响观测网的正常运行:功能故障1和2会导致相应的水下基站停止运行,故障1还可能降低海底电力系统的带载能力;功能故障3和4通常会降低海底电力系统的带载能力,不过该BU对应的水下基站仍可能正常运行.为减小对系统的扰动,PMACS一般需在观测网运行时辨识拓扑.
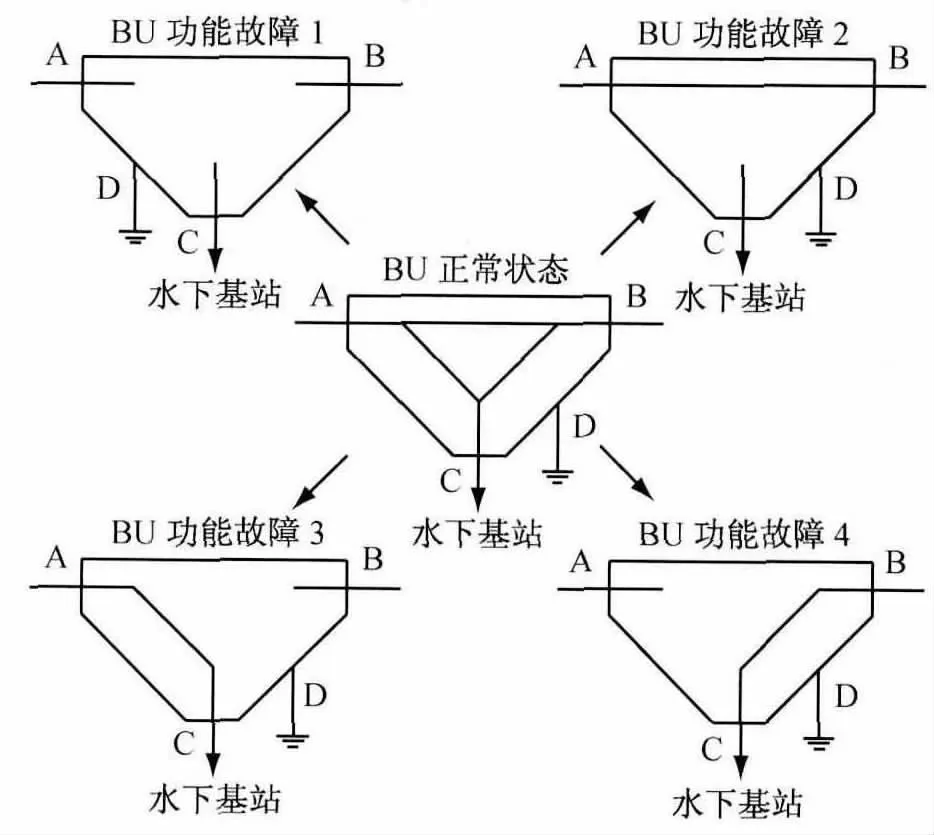
图7 分支单元的功能故障类型Fig.7 Functional fault types of the branching units
拓扑辨识通常可采用平均绝对残差法,但状态测量误差、海缆参数误差和BU继电器故障均会使测量值与估计值之间产生平均绝对残差(mean absolute residual,MAR),为消除测量误差和参数误差的影响,文献[7]利用MAR对岸基PFE输出电压的灵敏度来判断继电器故障.该方法的缺点是,若假设拓扑与运行拓扑不一致,需要遍历所有可能的拓扑故障来验证,计算较为繁琐,且需要变化PFE输出电压,对系统有一定的扰动.实际上,拓扑错误相当于大的参数错误,因此拓扑辨识方法也可采用类似参数估计的方法.若计算所得ΔYpq→Ypq,则说明该段海缆的两端对应的BU可能存在误开故障.
4.3 故障定位
海缆故障可分为电学故障和光学故障.光学故障主要是光纤断路或光中继器故障,可通过海缆通信监控系统(communications monitoring and control system,CMACS)检测和定位.由于海缆的结构和使用环境,工程经验表明电学故障发生的概率高于光学故障.电学故障可分为接地故障和开路故障,其中接地故障又可分为低阻故障和高阻故障.接地故障是海缆故障的主要形式,其主要原因为渔业拖网、船舶抛锚、自然灾害和鱼类撕咬等造成海缆绝缘损坏.
根据观测网的特点,将三种海缆电学故障定义如下.低阻故障指海缆绝缘破损严重,即故障处铜导体与海水之间的接触电阻较低,导致至少一个水下基站因输入欠压而停止运行.其中,短路故障是低阻故障的极端情况,可导致整个观测网电压崩溃,必须立即进入故障处理状态,待故障隔离后岸基PFE方可正常供电.高阻故障指海缆绝缘破损不太严重,即破损处铜导体与海水之间的接触电阻较高,此时所有水下基站仍能正常运行,但观测网的带载能力降低,且其安全运行裕量减小,可暂时不进入故障处理状态.开路故障指铜导体因外力作用在海缆内部断开,此时无法通过该海缆段传输电能,而导体对海绝缘电阻仍处于正常范围.在海底环境中,海缆发生开路故障的同时必定伴随着严重的低阻接地故障,因此若观测网存在单纯的海缆开路故障,实际上意味着海缆两端的BU继电器存在误开故障.海缆运行状态示意图见图8.图中,Uf、If和Rf分别为故障点处的对地电压、接地电流和接地电阻,Rpf和Rqf分别为BU#p、#q与故障点间的等效电阻,Rp、Rq分别为分支海缆p、q的等效电阻.
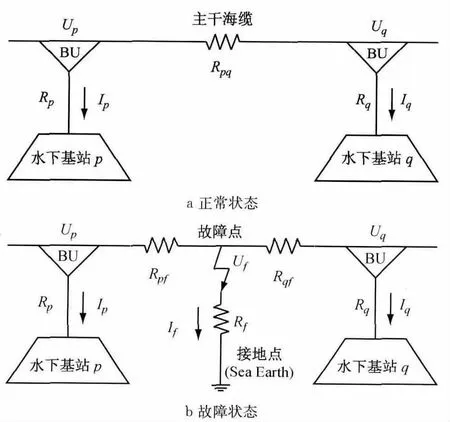
图8 海缆运行状态Fig.8 Operation status of submarine cables
陆地电网中电力电缆的故障定位按照检测原理主要分为阻抗法和行波法:阻抗法通过测量故障时测量端到故障点的阻抗,然后根据线路参数计算故障点的位置;行波法通过测量行波往返测量端和故障点的反射时间或者故障点行波到达线路两端的传播时间差,根据行波速率计算故障点的位置.实际工程中,阻抗法和行波法在交流系统中均有应用,而直流系统普遍采用行波法定位故障[17].由于BU内的继电器及其串联稳压管会对行波信号产生大量反射噪声,且行波法测量距离有限,因此行波法无法有效应用于大规模观测网的海缆故障定位.
当接地故障发生时,会在故障点处形成一定的故障电流.特别是发生低阻故障时,在PMACS的监控下,岸基PFE会因输出限流而降低输出电压,实现自动保护.发生接地故障时,为了观测网的运行安全,PMACS通常调节PFE至低电压,此时所有的水下基站均停止运行,且所有PFE的输出电流总和约等于故障电流值.此时,通过CMACS不断切换BU继电器的状态,PMACS同时监测PFE输出电流的变化,可确定故障点所在的海缆段.以图1所示的观测网为例,假设其采用常用的两端供电式,若BU#p和#q之间存在一处海缆低阻故障,在确定故障海缆段后,通过CMACS重建电网拓扑如图9所示,即等效于两台PFE直接连接到故障海缆.图中,Iss1和Iss2分别表示水下基站PFE 1和2的输出电流,USS1和USS2分别表示水下基站PFE 1和2的输出电压.
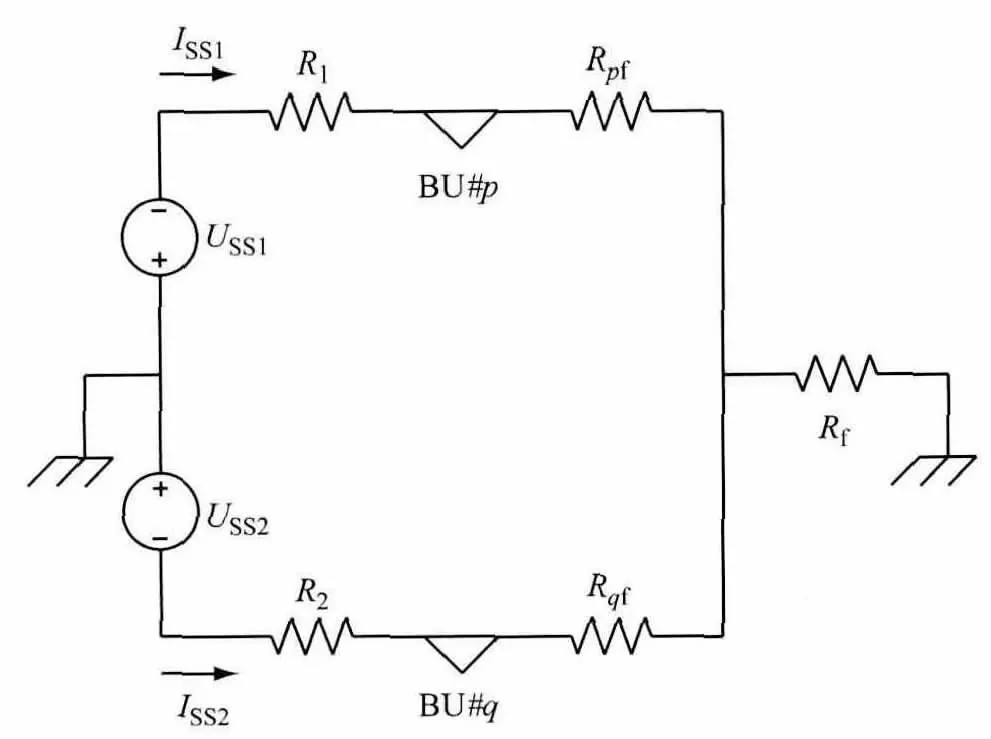
图9 通过CMACS重建的电网拓扑Fig.9 Power grid topology reconfiguration by CMACS
重建带故障海缆段的电网拓扑后,PMACS控制两台PFE分别运行,可得:
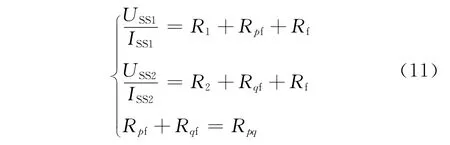
解上述方程得:
若定位结果接近某个BU,则应考虑BU内部发生接地故障的可能性.若观测网采用单个PFE,则可通过CMACS重建两种故障电网拓扑,联立两个故障电网方程,实现故障定位.该法利用了电切换型BU的可控性,具有简单有效的优点.需要注意的是,在故障定位的过程中,PMACS需要确保PFE的输出电流在安全阈值内.
5 结语与展望
为提高缆系海底观测网的用能效率和运行可靠性,根据观测网的物理架构特点,本文设计了PMACS的总体结构,说明了数据采集、负载管理和网络分析这三个子系统的主要功能和相互关系,研究了时间同步方案、负载供电优化策略和网络分析算法.
通过理论分析,获得了BU节点电压向量的加权最小二乘状态估计公式,提出了修正电网模型的新思路,并基于电切换型BU的可控性,提出了海缆接地故障定位的新方法.
缆系观测网的技术风险大、建设成本高,下一步将建立多节点观测网的中低压简化物理模型,用于初步检验PMACS在实际应用中的有效性.
[1] Barnes C R,Best M M R,Johnson F R,et al.Challenges,benefits,and opportunities in installing and operating cabled ocean observatories:perspectives from NEPTUNE canada[J].IEEE Journal of Oceanic Engineering,2013,38(1):144.
[2] Killeen T L.Ocean observatories initiative(OOI):advanced research tools for the ocean sciences[J].Marine Technology Society Journal,2010,44(6):15.
[3] 张伯明,孙宏斌,吴文传.3维协调的新一代电网能量管理系统[J].电力系统自动化,2007,31(13):1.ZHANG Boming,SUN Hongbin, WU Wenchuan.New generation of EMS with 3-dimensional coordination[J].Automation of Electric Power Systems,2007,31(13):1.
[4] Maghsoodlou F,Masiello R,Ray T.Energy management systems[J].IEEE Power and Energy Magazine,2004,2(5):49.
[5] El-Sharkawi M A,Upadhye A,Lu S,et al.North east pacific time-integrated undersea networked experiments(NEPTUNE):cable switching and protection[J].IEEE Journal of Oceanic Engineering,2005,30(1):232.
[6] Chan T,Liu C C,Howe B M,et al.Fault location for the NEPTUNE power system[J].IEEE Transactions on Power Systems,2007,22(2):522.
[7] Schneider K,Liu C C,Howe B.Topology error identification for the NEPTUNE power system[J].IEEE Transactions on Power Systems,2005,20(3):1224.
[8] 卢汉良,李德骏,杨灿军,等.深海海底观测网络远程电力监控系统研究[J].传感技术学报,2011,24(4):564.LU Hanliang,LI Dejun,YANG Canjun,et al.Study on remote electric power monitoring and control system of deep seafloor observatory network[J].Chinese Journal of Sensors and Actuators,2011,24(4):564.
[9] 吕枫,岳继光,彭晓彤,等.用于海底观测网络水下接驳盒的电能监控系统[J].计算机测量与控制,2011,19(5):1076.LÜ Feng,YUE Jiguang,PENG Xiaotong,et al.Power monitoring and control system for underwater junction boxes of sub-sea cabled observatory networks [J].Computer Measurement and Control,2011,19(5):1076.
[10] Harris D W,Duennebier F K.Powering cabled ocean-bottom observatories[J].IEEE Journal of Oceanic Engineering,2002,27(2):202.
[11] Ng K H,Sheble G B.Direct load control—aprofit-based load management using linear programming[J].IEEE Transactions on Power Systems,1998,13(2):688.
[12] Ting C,Chen C L,Howe B M.Optimization based load management for the NEPTUNE power system [C]//IEEE Power Engineering Society General Meeting.[S.l.]:IEEE,2007:1-6.
[13] Liu C,Schneider K,Kirkham H,et al.State estimation for the NEPTUNE power system[C]//IEEE PES Transmission and Distribution Conference &Exposition.[S.l.]:IEEE,2003:748-754.
[14] 李碧君,薛禹胜,顾锦汶,等.抗差估计理论及其在电力系统中的应用[J].电力系统自动化,1999,32(1):57.LI Bijun,XUE Yusheng,GU Jinwen,et al.Robust estimation theory and its application in power system[J].Automation of Electric Power Systems,1999,32(1):57.
[15] 张艳伟,范代读,许惠平.东海海底观测网小衢山试验站记录的2010年智利海啸信号分析[J].科学通报,2011,56(32):2732.ZHANG Yanwei,FAN Daidu,XU Huiping.Records of the tsunami induced by the 2010 Chilean earthquake from Xiaoqushan seafloor observatory in the East China Sea[J].Chinese Science Bulletin,2011,56(32):2732.
[16] Zarco P,Exposito A G.Power system parameter estimation:a survey[J].IEEE Transactions on Power Systems,2000,15(1):216.
[17] 宋国兵,蔡新雷,高淑萍,等.高压直流输电线路故障定位研究综述[J].电力系统保护与控制,2012,40(5):133.SONG Guobin,CAI Xinlei,GAO Shuping,et al.Survey of fault location research for HVDC transmission lines[J].Power System Protection and Control,2012,40(5):133.
