转动惯量对变载恒转矩制动系统性能的影响
2014-02-07陈正
陈 正
(广州奥的斯电梯有限公司,广东广州 510425)
变载系统的恒转矩制动是指制动系统的制动力矩是预先设定的,在设备正常运行期间,不论负载大小,制动力矩都不改变,如果系统固有的运动部件总质量(即不随负载变化的运动部份的质量)与制动力矩匹配不好的话,工况负载最小时发生紧急制动,减加速度可能太大,或者工况负载最大时发生紧急制动,制停距离可能过长,这样的系统用于人员运输是不安全的。作为公众场所重要的交通工具之一,扶梯是一个载荷变化范围相当大的人员运输系统,目前用于扶梯制动系统的多数是恒转矩设定的机械式制动系统,所以,扶梯的制动属于变载系统的恒转矩制动。如何优化系统固有的运动部件总质量与制动力矩的对应关系,是本文探讨的重点。
1 特种设备安全规范要求
为了保证扶梯上乘客的安全,扶梯必须有一个可靠的制动系统,保证扶梯在出现故障时及时平稳地停止。根据《自动扶梯与自动人行道的制造与安装安全规范》GB16899-2011,与扶梯的工作制动器相关的要求如表1。
GB16899-2011 5.4.2.1.3.1,自动扶梯制动载荷的确定[1]。
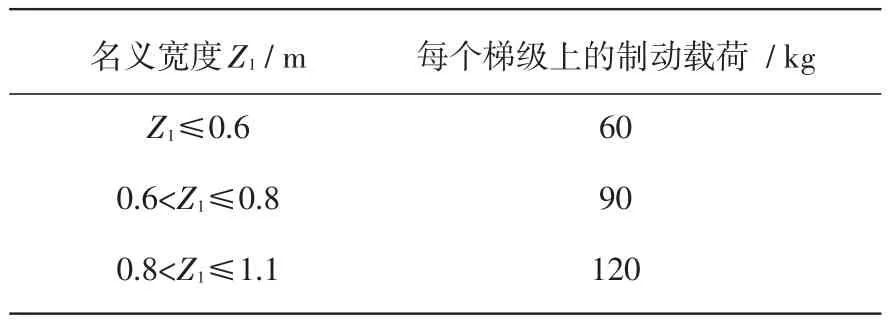
表1 自动扶梯制动载荷的规范要求
GB16899-2011 5.4.2.1.3.2,空载和有载向下运行自动扶梯的制停距离应符合表2。

表2 制停距离的规范要求
GB16899-2011 5.4.2.1.3.2,自动扶梯向下运行时,制动器制动过程中沿运行方向上的减速度不应大于1 m/s2。
对于恒定转矩的制动系统,最长的制停距离发生在系统满载时,因为制动前系统的动能最大,过长的制停距离会导致紧急情况下无法减速或停止;最大的减速度发生在系统轻载时,因为制动前系统的动能最小,过大的减速度会使乘客摔倒。如何能够在大范围载荷变化的工况条件下实现稳定的减速、制停、维持静止状态的功能是对扶梯制动系统的基本要求。
2 制动系统的主要功能及制动机理
制动系统是对一个具有一定能量的运动物体做功,有效地控制能量消耗的过程,使运动物体减速最终停止的一套装置。制动过程是利用非旋转元件与旋转元件间的摩擦来阻止旋转元件的转动或转动的趋势。能量转换形式是摩擦元件的磨耗和散热。使机械运转部件停止或减速所必须施加的阻力矩称为制动力矩。制动力矩是设计、选用制动器的依据,其大小取决于摩擦副的结构型式和工作要求。制动器选用的摩擦材料的性能直接影响制动过程,摩擦副的工作温度和温升速度与摩擦材料的耐热、散热、磨耗率(即摩擦材料单位体积消耗的能量)有关,影响制动力矩的稳定数值。对于一个受温升和接触影响等不稳定因素影响的摩擦副,期待制动力矩和预设的制动力之间的能获得精确的对应关系是很比较困难的,所以,除了选择具备高而稳定的摩擦系数和良好的耐磨性的摩擦材料之外,配置一个转动惯量合适的系统,允许制动力矩在一定范围内变化,都能使空载与满载的扶梯可靠地减速、制停、维持静止状态,是扶梯制动系统优化的关键因素之一。为了达到这个目的,需要使系统对满载与空载的变化不敏感,即负载的变化量占系统固有的运动部件总质量的比例越小越好,这样才能更易于用同一个预设好的制动转矩来控制扶梯运行过程中的各种工况。
如图1,当系统固有的运动部件总质量较大时,预设好的制动转矩适合于满载制动时,空载制动仍可以相对平缓,不至于负加速度过大。如图2,由于系统固有的运动部件总质量较小,预设好的制动转矩适合于满载制动时,空载工况下可能制动太快,负加速度太大。

图1 大质量系统与负载变化的比例

图2 小质量系统与负载变化的比例
3 扶梯制动过程的关键因素分析及公式推导
3.1 制动响应延时对制动能量的影响
扶梯制动过程的第一阶段:制动动作响应延时,扶梯在负载重力作用下加速下滑。
(1)公式推导
主机断电停止驱动,但制动电磁铁在失电后由于磁滞的延时响应,扶梯在乘客重力的作用下加速向下惯性滑行。系统简图如图3所示。

图3 制动延时响应过程系统简图
正常工况下,扶梯的起动和制动都是在空载情况下,梯上有乘客时的制动都是属于紧急制动,制动信号来自于安全开关或电源,从电源的断开到机械动作的完全生效均有短暂的延时,这时乘客重量将使扶梯下行加速,类似于挂空档的汽车沿斜坡向下滑行,这段时间产生的末速度就是开始制动时的初速度。延时时间越长,制动的初速度越大,制动的能量越大,制动产生的减加速度越大,满载制动距离越长。
下滑末速度: v1=v0+a×t;
下滑距离: S1=v0×t+×a×t2;
下滑力:F=m×g×(sinα-μ×cosα)-F';
系统质量=乘客质量+移动部件质量+转动部件换算到移动物体上的当量质量:
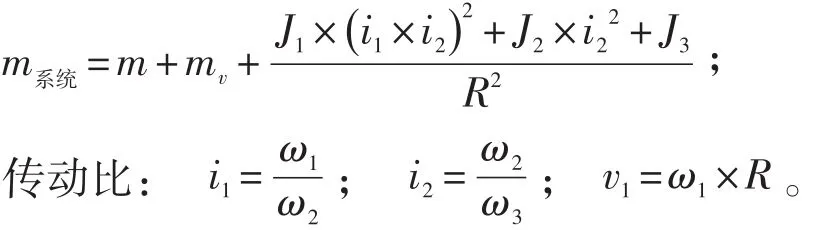
其中:m(kg)——乘客重量;mv(kg)——梯级、梯级链、扶手带等移动部件的质量
下滑阻力F’(N)——梯级、链条、扶手带在斜段方向运动的摩擦阻力
v0(m/s)——梯速;R(m)——梯级链轮的半径;μ——梯路运行时的摩擦系数;
J1、J2、J3(kgm2)——轴1、轴2、轴3上回转运动部件的转动惯量。
由上面各式推导出,速度和滑动距离与乘客重量、系统惯量、响应时间的关系:

(2)计算示例
假设一个6 m的扶梯,以0.5 m/s速度下行,梯上满负载乘客重量m=3 600 kg,梯上空载乘客重量m=0,梯上的摩擦阻力F’约为1 100 N,系统的总传动比约为100,制动响应延时分别为t=0.15 s和t=0.3 s,高速轴转动惯量分别为J1=0.5 kgm2和J1=0.3 kgm2,根据公式(1),对比表3所示数据。
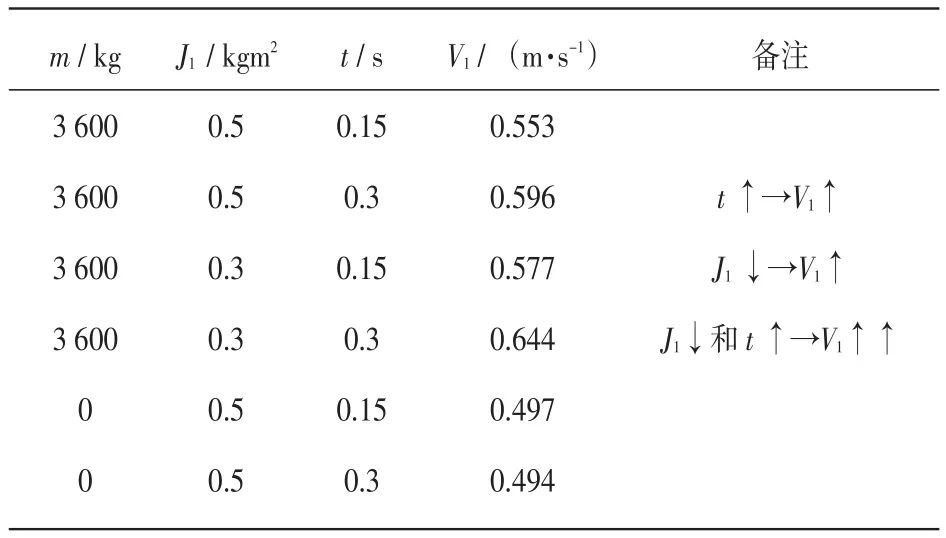
表3 响应延时t和转动惯量J1对速度V1影响的示例
(3)关键因素分析
从公式(1)和图4看出,
在制动响应延时的瞬间,延时后的制动初速度v1随响应时间t而增加,但高速轴的转动惯量J1的增加却使v1随时间增加的幅度有所减小。

图4 制动延时时间与速度的关系曲线
制动延时时间t越小,高速轴的转动惯量J1越大,由乘客重量m引起的下滑速度v1越小,制动的能量越小,对于乘客的安全有利。
3.2 高速轴转动惯量对制动转矩及制停距离的影响
扶梯制动过程的第二阶段:机械制动动作生效后,扶梯开始在制动力矩的作用下减速至最终停止。
(1)公式推导
扶梯最不利的制动状态是乘客满负载以一定速度下行时发生紧急制动,此时需要被制停的能量来自于运动中的系统固有惯性质量和乘客重量的垂直载荷。
根据动能定理:质点系所有外力做功之和加上所有内力做功之和等于质点系总动能的改变量。
根据《机械设计手册(第五版)第2卷》,要求完全制停时,系统的末动能为零。
外力所做的功=系统制动前直动质量的动能+系统制动前旋转质量的动能[3]。
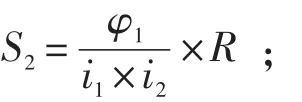
当扶梯满负载向下运行,要求在给定制动距离S2之内完全制停时,系统简图见图5。
φ1(rad)——制动轴在制动时的转角;
S2(m)——扶梯斜段的制停距离;
ω1(rad/s)——制动轴角速度;
v1(m/s)——直动部份速度。
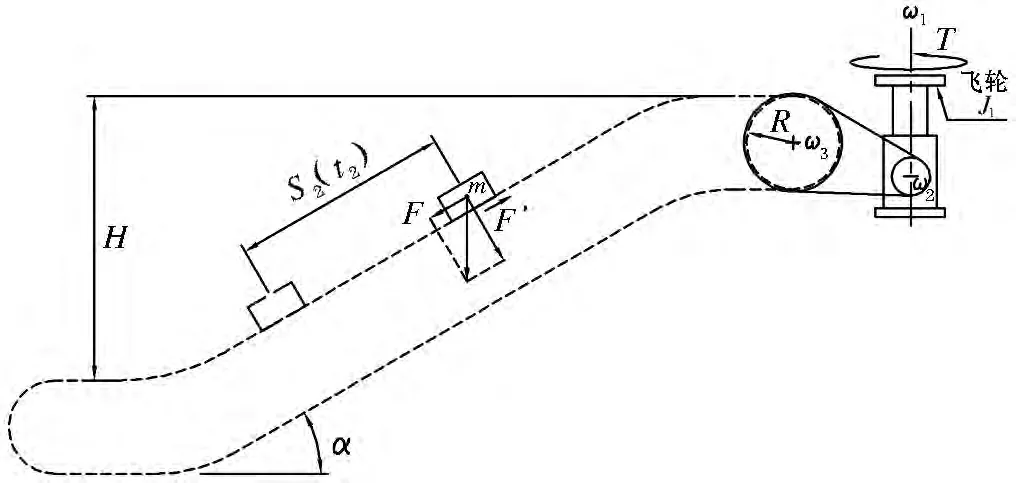
图5 制动至停止过程系统简图
T×φ1+外力做功W=系统总动能E;
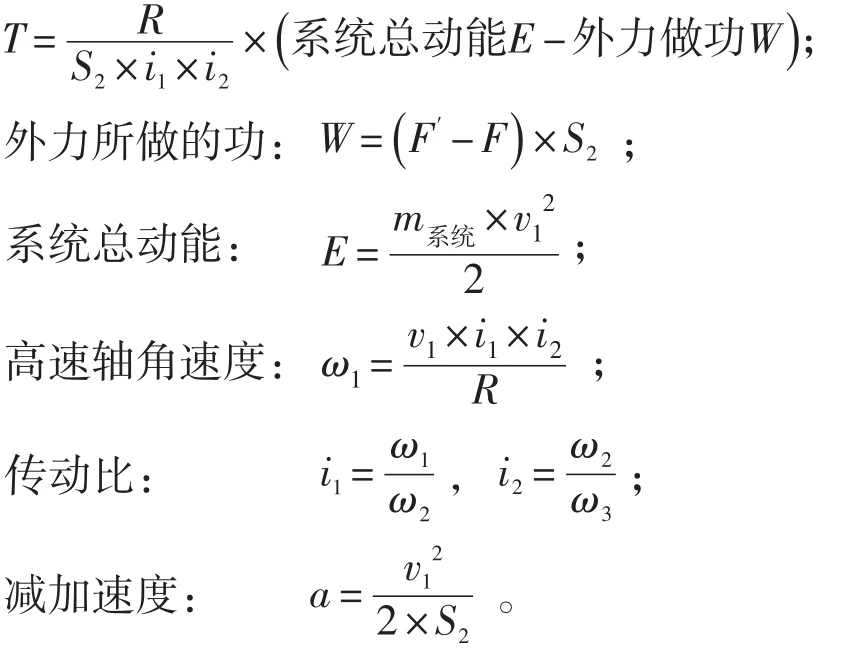
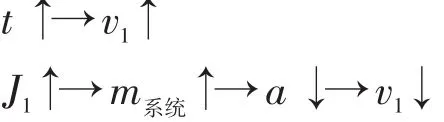
由上面各式推导出,制动力矩和制动距离与乘客重量、系统惯量、制动初速度的关系:

(2)根据GB16899-2011,对制动距离和最大减加速度必须符合:

(3)计算示例
制动的过程是在制动距离S2内将制动轴的转速从ω1减小到0。
从给定的制动距离S2求所需的制动力矩T,给定的制动距离S2必须从GB16899-2011中对制动距离的要求中减去在制动延时期间的下滑距离S1。
例如对于0.5 m/s梯速时,取空载时最小制动距离0.14 m和满载时最大制动距离0.9m,作为计算制动力矩时的给定制动距离S2。
假设一个6 m的扶梯,0.5 m/s速度下行,梯上满负载时乘客重量m=3 600 kg,梯上空载时乘客重量m=0,梯上的摩擦阻力F’约为1 100 N,系统的总传动比约为100,制动响应延时t=0.15 s,高速轴转动惯量分别为J1=0.5 kgm2和J1=0.3 kgm2,根据前面所述的表2的规范要求及公式(1)、公式 (2)、公式 (5)、公式 (6)、公式(7)、公式(3)各式的计算,对比数据表4。

表4 转动惯量J1对制动力矩T可用的范围影响的示例
(4)关键因素分析
从图6和图7的对比看出,
J1↑→T最大↑→(T最大-T最小)↑→ 容易满足最大制动距离及减加速度要求。
对于给定制动距离和最大减加速度的要求,在扶梯从空载到满载的负载变化范围内,高速轴的转动惯量J1的增加可以令最大制动力矩和最小制动力矩分别控制的制停距离随负载变化的曲线的距离拉开,即制动力矩可用的范围明显变宽,制动力矩在一定范围内波动仍能使扶梯可靠平稳地制停,对提高扶梯制动系统的可靠性有利。
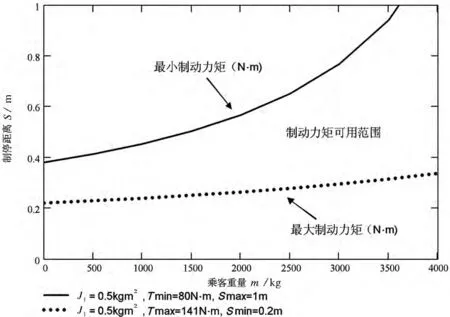
图6 制停距离随负载变化的曲线(惯量较大时)

图7 制停距离随负载变化的曲线(惯量较小时)
4 结论
对于类似扶梯一类的大范围变载恒转矩制动系统,要实现扶梯的制停过程能够满足安全规范的要求,即在空载到满载任意工况下,满载制动时不超过规定的最大制停距离,空载制停时最大减加速度小于1 m/s2,必须提高系统固有的运动部件的总质量,使负载的变化影响相对减小,便于用一个恒定的制动转矩控制全部工况的制停过程。扶梯是一个大减速比的传动系统,高速轴的转动惯量J1是以与总减速比的平方成正比例的倍数影响到系统固有的运动部件的等效总质量,所以,高速轴飞轮惯量的少量增加,可以使制动力矩的可用范围明显扩大,从而可以弥补一定范围的制造及调整误差和使用工况引起的制动力矩的波动,更可靠地保障乘客的安全。
虽然大惯量系统具有上述的优点,但是大惯量系统也是有一定的限制的,不可避免地带来了一些负面的影响,如系统起动时间增加,制动磨耗件磨损加快,传动件强度需要加固等。增加高速轴转动惯量时必须系统性地考虑平衡各方面的影响。
目前的扶梯主机必须配备一个适当惯量的飞轮,是平衡负载变化,优化系统制动性能的关键。
5 结束语
本文以扶梯为例,描述了配置一个合适的系统惯量,在无法预测载荷的任意工况下设定一个不变的制动力矩,能同时满足空载最大减加速度与满载制动最长制停距离的要求的做法,是目前一定程度上保证扶梯上乘客安全的方法之一。
对于大范围变载的人员运输系统,恒转矩制动系统并不是一个最好的制动系统,各种机电一体化的智能控制系统的不断涌现,随负载变化而改变制动转矩系统将是今后的研究方向,将为人员运输系统提供更舒适安全的保障。
[1]全国电梯标准化技术委员会GB16899-2011[M].北京:中国标准出版社,2011.
[2]闻梆椿.机械设计手册:第五版:第1卷[M].北京:机械工业出版社,2010.
[3]成大先.机械设计手册:第五版:第2卷[M].北京:化学工业出版社,2007.