基于两个特殊电场平面的目标定位技术
2014-02-07王相生
王相生
海军装备部,北京,100841
0 引 言
在过去的几十年里,人们对舰船及海洋环境的磁场、声场和水压场的产生机理及其特征已进行了较为深入的研究,并将研究成果应用到了舰船隐身技术中[1-2]。同时,又采取了各种各样的技术来消除或减弱舰船的声、磁、水压场信号,例如,采用消磁技术减弱舰船磁场,采用低噪声螺旋桨和减震器等降低舰船的辐射噪声,采用在船体外附加装置改变舰船水压场信号模式等[3-4],这使得将传统的磁场、声场和水压场作为目标定位信号源遇到困难。为此,各国在继续加强研究舰船磁场、声场和水压场的基础上,也在不断探索尚未被利用的舰船物理场。国内外的研究成果均表明,舰船电场毫无疑问可以成为水雷引信新的信号源,因此成为探测和定位舰船的新物理量[5-6]。
对水中目标的定位一直是个难题,特别是在目标物理特性被人为削弱和消除的今天,隐蔽性成为目标定位技术发展的一大制约因素。对于水下目标,由于海水的屏蔽作用,雷达、红外等方法相继失效[7-8],因此迫切需要根据另外一种物理场对目标进行定位。本文将提出一种新的基于2 个特殊电场平面的目标定位方法。
1 三层模型中混合电偶极子模型的电场分布
如图1 所示,采用球坐标系,假设坐标原点O在直流电偶极子的中点,设电偶极矩为P,其方向沿z 轴正向,空间电导率为σ 。

图1 直流电偶极子在全空间产生的电场Fig.1 Electric field of direct electric dipole in 3D space
则直流电偶极子在空间场点M(r,θ,φ)处产生的电场强度E 为

式中:θ 表示场点M 与z 轴正向夹角;r 表示场点M 与原点之间的距离。
在空气、海水和海床3 层介质浅海模型中[9],采用柱面坐标(O,ρ,ϕ,z),z=0表示海平面,0<z<D的区域为海水,z>D 的区域为海床。直流电偶极子源点S 位于(0,0,h)处,h<D。假设P10为水平电偶极子在S 点处的水平偶极矩大小,且x 轴正向为正方向,P20为垂直电偶极子在S 点处的垂直偶极矩大小,且z 轴正向为正方向。测点在M(ρ,ϕ,z)处,z<D,如图2 所示。

图2 三层模型中的测量点位置Fig.2 The position of measured point in three-layers model
镜像法表明,3 层介质中电偶极子的电场强度等于无穷多个位于镜像位置的电偶极子电场强度的叠加[10]。当存在两个平行界面时,电偶极子在两个界面之间不断“镜像”,因此在图1 所示的浅海模型中,位于海水中的混合电偶极子在海水中场点处产生的场可以用图3 所示的无穷多个镜像电偶极子在无限大的海水空间分别产生的场的叠加来替代[11-12]。
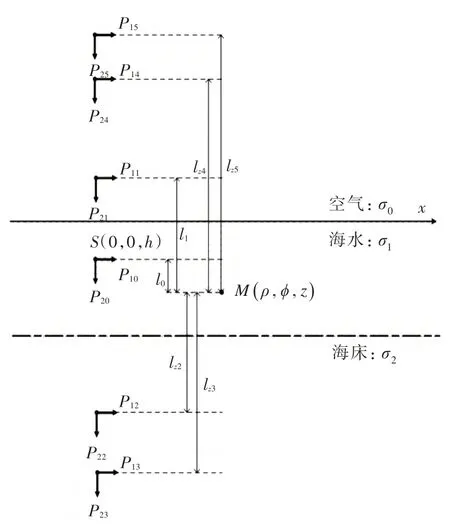
图3 两个平行分界面时的电偶极子的镜像Fig.3 Mirror images of electric dipole with two parallel interfaces
在图3 中,若用E1与E2分别表示源点S 处由水平电偶极矩P10和垂直电偶极矩P20在场点M 处产生的电场,则
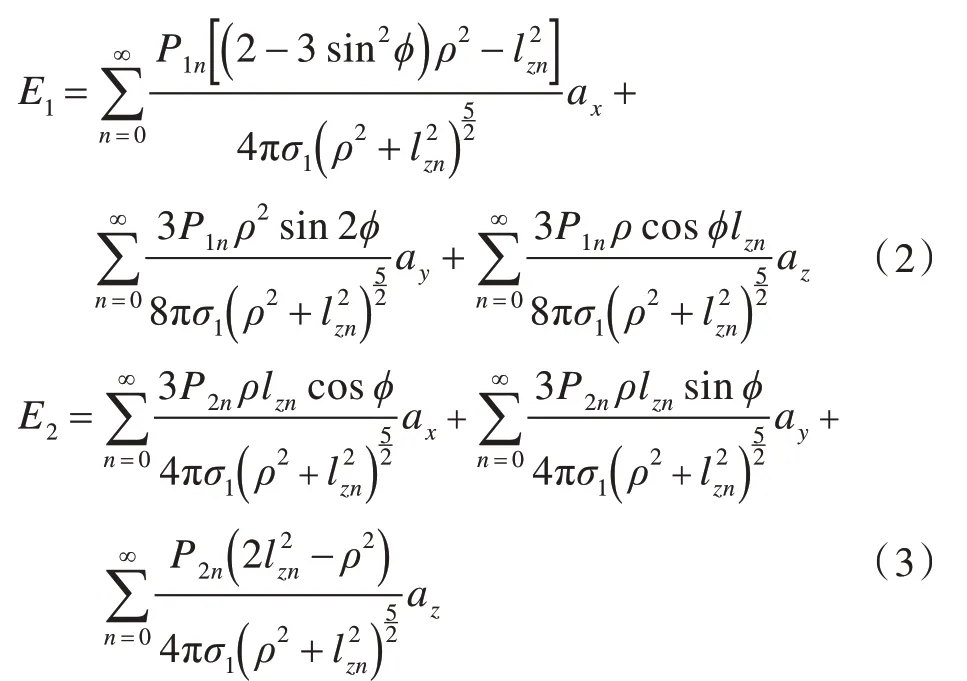
式中:P1n表示第n 个镜像位置的水平电偶极矩;P2n表示第n 个镜像位置的垂直电偶极矩;lzn表示第n 个镜像位置的电偶极子与场点M 在z 轴方向上的垂直距离;σ1表示海水电导率,且


2 三层介质中目标静电场分布的两个重要平面
采用镜像法,给出了3 层模型中混合电偶极子模型的电场分布公式,通过分析电场分布特征,来达到目标定位的目的。
2.1 电场Ey分量的过零面
电场Ey分量过零面的客观存在是3 层介质中混合电偶极子模型电场分布的一个重要特性,它是水中目标定位的基础,可以通过寻找此平面来实现对目标的定位。
各种形式的社团生活,让老年人的晚年生活过得充实有意义。我的社区我的团,如果您所在的社团够出彩、有特色,就可以联系我们一起记录社团生活的趣事和精彩瞬间,分享给大家。
图4 中,通过镜像法可以得出3 层模型中混合电偶极子模型的电场分布公式,场点M 处的电场强度E1与E2可分别用式(2)和式(3)来表示。
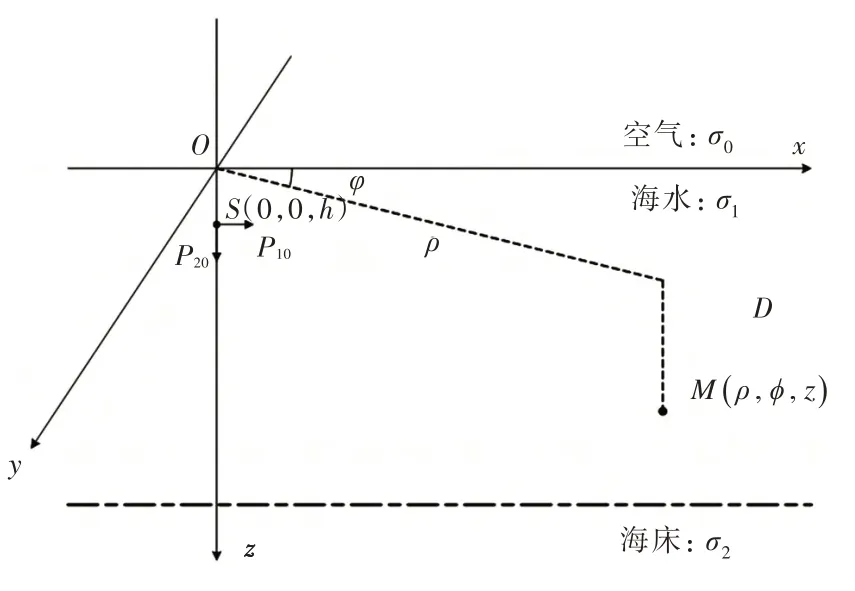
图4 电偶极子在场点处产生的电场示意图Fig.4 The electric field diagram of electric dipole's site
则3 层模型中混合电偶极子模型的电场Ey分量为

易证,当ϕ=π 时Ey=0。
即存在ϕ=π 的一个平面,其上电场Ey方向分量值为零,如图5 所示,在船的纵剖面xoz 上有ϕ=π,则其y 轴方向电场测量值Ey=0。
通过上述讨论可知,当在线段CD 上进行电场测量时,测量值Ey分量在xoz 面与线段CD 的交点处为零。
2.2 电场Ex分量的极值面
同理,图4 中,通过镜像法可以得出3 层模型中电场Ex分量为

图5 船的纵剖面xozFig.5 The profile xoz of ship
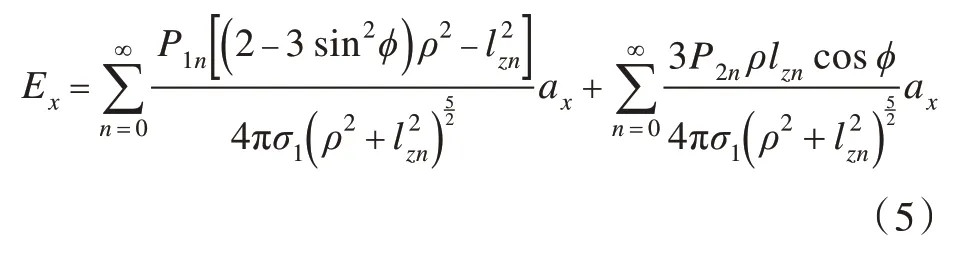
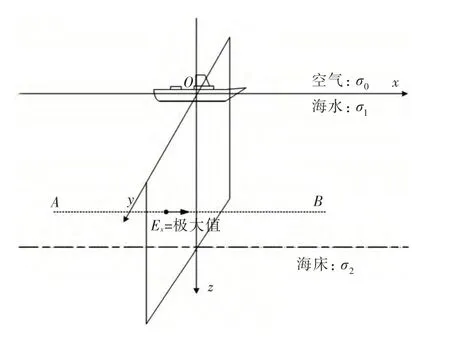
图6 x 轴方向极值面示意图Fig.6 Extreme value surface diagram of x-axis
通过上述讨论可知,当在线段AB 上进行电场测量时,测量值Ex分量在yoz 平面与AB 线段的交点处取得极大值。
3 仿真实验
3.1 电场Ey分量的过零面Ansoft仿真
为了验证电场Ey分量的过零面理论推导的正确性,采用经典电磁场有限元分析软件Ansoft 对目标进行建模,并通过对如图7 所示,距目标分别为400,600,800 m,深度为100 m 的3 条直线C1D1,C2D2和C3D3上的电场测量值Ey分量进行仿真,验证3 条直线与xoz 平面的交点电场测量值Ey分量为零,即xoz 平面是电场测量值Ey分量的过零面。
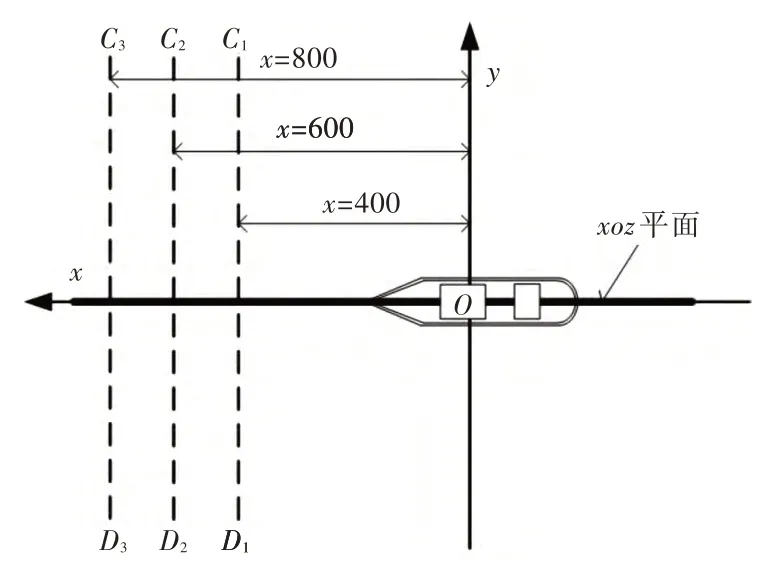
图7 距目标前进方向不同距离的Ansoft仿真示意图Fig.7 Simulation diagram at different distance from moving forward
3 条直线C1D1,C2D2和C3D3上电场测量值Ey分量的有限元Ansoft仿真结果如图8 所示。

图8 直线C1D1,C2D2和C3D3上分量Ey 的Ansoft仿真结果Fig.8 Simulation results of Ey of straight line C1D1,C2D2,C3D3
由仿真结果可以看出,对于电场测量值Ey分量而言,在直线C1D1,C2D2和C3D3上,当y=0 时电场测量值Ey=0,验证了理论推导的正确性。
3.2 电场Ex分量的极值面Ansoft仿真
为了验证电场Ex分量极值面理论推导的正确性,本小节将采用经典的电磁场有限元分析软件Ansoft 对目标进行建模,并通过对如图9 所示,距目标分别为400,600,800 m,深度为100 m 的3 条直线A1B1,A2B2和A3B3上的电场测量值Ex分量进行仿真,验证3 条直线与yoz 平面的交点电场测量值Ex分量取极大值,即yoz 平面是电场测量值Ex分量的极值面。
3 条直线A1B1,A2B2和A3B3上电场测量值Ex分量的有限元Ansoft仿真结果如图10 所示。
通过仿真结果可以看出,对电场测量值Ex分量而言,无论其在直线A1B1,A2B2上还是A3B3上,当x=0,即ϕ=π/2 时,电场测量值Ex取得极大值,因此很好地验证了理论推导的正确性。

图9 距目标船舷不同距离的Ansoft仿真示意图Fig.9 Simulation diagram at different distance from the side
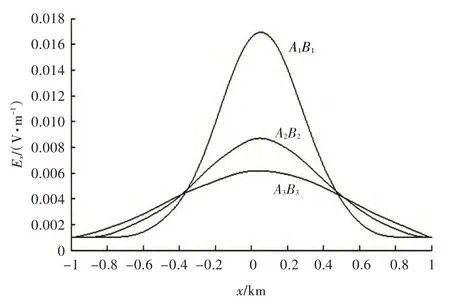
图10 直线A1B1,A2B2和A3B3上Ex分量的仿真结果Fig.10 Simulation results of Ex of straight line A1B1,A2B2,A3B3
3.3 基于两个特殊电场平面的目标定位
建立如图11 所示的目标定位坐标系。
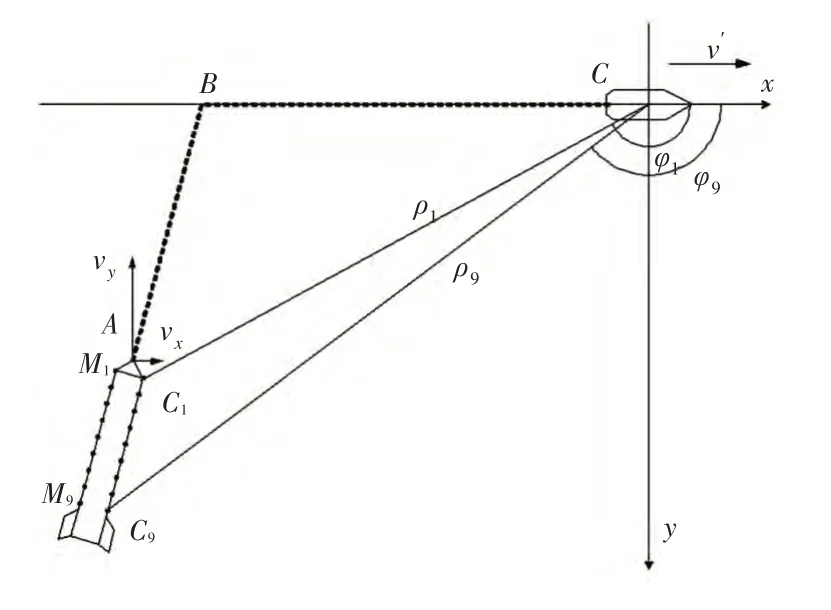
图11 水中目标定位坐标系Fig.11 Location coordinate for underwater target
将编号为M1~M9,C1~C9的18 个三分量电场传感器按图11 所示位置排列。假设水中兵器在A点处于静止状态,然后以速度v′向B 点运动。根据C1和C9电场测量值的大小,确定攻击方向是y轴正向还是负向;存在一个Ey=0 的平面,可以根据Ey值由正变负或由负变正判断水中兵器到达B 点。当运动到B 点以后,测量相对速度v′,并将水中兵器速度方向指向相对速度v′的方向,此时水中兵器将沿BC 段前进。
4 结 语
在空气—海水—海床3 层模型中,当水下目标未知时,可用目标处多个水平、垂直电偶极子电场的叠加来替代任意目标的电场分布,文中讨论的一系列由未知电偶极矩的水平电偶极矩与垂直电偶极矩叠加而成的混合电偶极矩的模型几乎包括了实际应用中的多种情况,所以文中基于3 层介质模型的混合偶极子模型,所提出的定位方法适应性极广,具有很高的工程应用价值。
[1]LIGUORE J P. Successful demonstration and testing of all-electric towed array handling system equipment on USS Virginia class submarines[C]// Europe Undersea Defence Technology,2004:834-839.
[2]毛伟. 浅海环境下运动舰船轴频电磁场建模方法及传播规律研究[D].武汉:海军工程大学,2009:1-25.
[3]包中华. 基于水下电磁场的舰船目标远程探测方法研究[D].武汉:海军工程大学,2010:74-86.
[4]赵爽,吴重庆. 多电偶极子源定位问题的矩阵分析[J].北京交通大学学报,2008,32(3):56-59.ZHAO Shuang,WU Chongqing. Matrix analysis of poly-dipole source localization[J]. Journal of Beijing Jiaotong University,2008,32(3):56-59.
[5]包中华,龚沈光,孙剑英. 使用双矢量传感器定位深海中水平直流电偶极子源[J]. 海军工程大学学报,2011,23(3):53-58.BAO Zhonghua,GONG Shenguang,SUN Jianying. Lo⁃cation of horizontal electric dipole source embedded in deep sea by using two vector-sensor[J]. Journal of Na⁃val University of Engineering,2011,23(3):53-58.
[6]林春生,龚沈光.舰船物理场[M].2 版.北京:兵器工业出版社,2007:233-256.
[7]雷亚辉. 水下目标的时间反转法声探测技术应用研究[D].哈尔滨:哈尔滨工程大学,2010:1-11.
[8]毕军建,崔占忠,陈曦. 空中目标静电场矢量定位方法研究[J].探测与控制学报,2005,27(1):16-18.BI Junjian,CUI Zhanzhong,CHEN Xi. Research on aerial object location method using electrostatic vector measurement[J]. Journal of Detection & Control,2005,27(1):16-18.
[9]朱秀芹,潘威炎.垂直电偶极子在负折射媒质中激起的场[J].电波科学学报,2006,21(2):177-183.ZHU Xiuqin,PAN Weiyan. Electromagnetic field pro⁃duced by a vertical electric dipole on a negative-index media half space[J]. Chinese Journal of Radio Sci⁃ence,2006,21(2):177-183.
[10]肖春燕,雷银照. 分层球形导体中任意位置直流电流元产生电位的解析解[J]. 物理学报,2005,54(4):1950-1957.XIAO Chunyan,LEI Yinzhao. Analytical solution of electric potential produced by a direct current point source located in a multilayered spherical volume con⁃ductor[J]. Acta Physica Sinica,2005,54(4):1950-1957.
[11]赵政鸿,罗耀煌,包德修.谐变垂直电偶极子在四分层媒质中的电磁波[J].云南师范大学学报:自然科学版,1999,19(1):33-38.ZHAO Zhenghong,LUO Yaohuang,BAO Dexiu. The electromagnetic waves of a vertical electric dipole in four-layered media[J]. Journal of Yunnan Normal University(Natural Science Edition),1999,19(1):33-38.
[12]DEMILIER L,DURAND C,RANNOU C,et al.Cor⁃rosion related electromagnetic signatures measure⁃ments and modeling on a 1∶40th scaled model[J].Simulation of Electro-chemical Processes II:Engi⁃neering Sciences,2007,54:368-370.
