舰艇横摇进水过程姿态参数数值求解与实验研究
2014-02-07侯岳鄢凯浦金云
侯岳,鄢凯,浦金云
1 海军工程大学动力工程学院,湖北武汉430033
2 海军蚌埠士官学校,安徽蚌埠233012
0 引 言
目前,国内对于破损舰艇姿态计算的研究主要考虑的还是进水过程完成后,而未对舰艇整个进水过程的姿态参数进行分析,因而不能客观、准确地揭示舰艇进水过程的抗沉能力。然而,在舰艇的整个进水过程中,中间阶段可能会比最终的平衡状态更加危险[1]。为此,就需要对舰艇进水过程中姿态参数的变化规律进行研究,这也是进行舰艇进水过程稳性校核的基础。
针对舰艇进水过程的姿态参数计算模型,国内外大致可以分为2 类[2]:第1 类是不考虑外界波浪力矩和风倾力矩的准静态模型,其基本假设是舰艇在进水过程的任意时刻都是稳定平衡的[3];第2 类是考虑舰艇横揺及纵摇等运动的动态模型。本文将以第2 类模型为基础,主要研究舰艇横摇运动下进水过程中的姿态变化规律。
目前,对于舰艇进水过程的实验研究,文献[2]、文献[4]和文献[5]分别对“对称进水”和“不对称进水”的进水过程进行了验证,但其验证的都是无横摇条件下的进水过程。本文将在文献[2]的基础上,建立舰艇横摇运动时进水过程中的姿态参数计算模型。
1 横摇进水过程中的姿态模型
由于舰艇破损进水后,由横摇导致的舰艇倾覆是舰艇面临的最危险的情况,为此,本文主要研究舰艇横摇运动时进水过程中的运动模型。
在一定的海况条件下,舰艇在破损进水过程的横摇运动中将受到风倾力矩(MWD)、舰船自身惯性力矩(Mint)、阻尼力矩(Mdamp)、扶正力矩(Mr)以及舱室进水的倾斜力矩的作用(Minc),如图1所示。

图1 进水过程横摇受力图Fig.1 The force of rolling in flooding process
本文在建立进水过程的姿态参数计算模型时,所做的基本假设为:
1)外界动倾力矩不考虑波浪力矩,主要考虑横向风倾力矩的作用,包括突风力矩和静风力矩;
2)进水和舰艇的横摇耦合运动是主要的,忽略纵摇和升沉运动的影响;
3)在横摇过程中,舱内液面保持与外界水平面相平,不考虑舱内液体的激荡作用。
1.1 计算模型
设舰艇共有n 个舱室可能会进水,与舱室i(i=1,2,...,n)相连的破口编号集合记为Ω(i),舱室之间只有一个破口;破口Cij(j ∈Ω(i))的面积为ACij,流量系数为μCij,破口Cij距离水线的距离为HCij;舱室i 内水线面的面积为Si,舱室i 内水线面距水线的垂直距离为Hi。
横摇运动时,舰艇进水过程中的姿态参数模型应满足如下方程:
1)横摇运动方程;
2)垂向受力平衡方程;
3)纵向平衡方程;
4)所有进水舱室应满足进水量平衡方程,即任意时刻通过破口流入舱室的总流量等于舱室内进水的增加量;
5)各个破口的进水流线应满足伯努利方程。则计算模型满足式(1)所示的方程组[2,6]:

式中:I 和Ifc分别为船体本身的惯性矩和附加惯性矩;B1和B2为阻尼系数;D 为排水量;θ 为横摇角;φ 为纵倾角;YG为未破损舰艇重心的横向坐标;ZG为未破损舰艇重心的垂向坐标;字符上的“—”表示船体初始要素与进水损失要素之差,称为水线面或水下部分的有效要素;为破损舰艇浮心的横向坐标;为破损舰艇浮心的垂向坐标;Vw为风速;Aw为水线上舰艇的侧向投影面积;Zw为受风面积中心至平均吃水一半点处的距离;V 为破损舰艇的排水体积;V0为未破损舰艇的排水体积;Vc为舱室的进水体积;Tm为船舯吃水;Myz为对yoz 平面的纵向体积静矩;Mxy为对xoy 平面的垂向体积静矩。
1.2 模型求解流程
经分析式(1)可知,QCij(t)是舰艇HCij与Hi的函数,而HCij又是舰艇横倾角的函数,因此该微分方程组中变量的个数为n+4 个,依次为Hi(i=1,2,…,n),Tm,θ,φ 和t 。但式(1)中仅包含了n+3 个方程,分别为n 个破损舱室的进水量平衡方程、1 个垂向受力平衡方程、1 个纵向平衡方程和1 个横摇运动方程。因此,为了求解Hi(i=1,2,…,n),Tm,θ 和φ 随时间t 的变化关系,必须对t 进行离散化处理,通过设定时间仿真步长dt,以求得特定时刻下Hi(i=1,2,…,n),Tm,θ 和φ 的值,进而描述舰艇进水过程中姿态参数的变化规律。由上述分析可知,微分方程组在每个不同的时刻Tm,θ 和φ 的值是不同的。换而言之,当时刻t 固定时,Tm,θ 和φ 可以看做是定值,于是,此时该微分方程组就包含了n 个Hi未知量,并且由n 个非线性微分方程构成,具备了求解的最基本条件[6-7]。详细的求解方法可参见文献[2]和文献[8],本文不再赘述。
通过求解进水量平衡微分方程,可以得出任意时刻t 破损舱室的进水增量,并得到当前时刻破损舱室总的进水量。然后,根据式(1)中的第1个方程求出t+dt 时刻的横摇角,再由其他方程计算出该时刻舰艇新的船舯吃水、纵倾角、破损扶正力矩和阻尼力矩,并以此作为下一步循环的舰艇横摇姿态。如此循环计算,直到破损舱室的进水量不再发生变化,其求解思路如图2 所示。

图2 求解流程图Fig.2 The flow chart of solving process
2 横摇运动方程的数值求解
在图2的求解流程中,第5步,即如何根据式(1)中的第1 个方程求出t+dt 时刻的横摇角是求解的关键。本节将介绍如何使用四阶龙格—库塔方法求解横摇运动微分方程。
横摇运动微分方程可表示为

假设舰艇横摇角及横摇角速度的初始值分别为:

若设β=θ',则二阶微分方程可变为一阶微分方程组:

对横摇运动微分方程而言,设第k-1 个仿真时刻,即(k-1)·dt 时刻的横摇角为θk-1,横摇角速度为βk-1,通过下面的四阶龙格—库塔方法求解k·dt 时刻舰艇的横摇角及其角速度[9-10]为:

横摇运动微分方程的系数是随时间变化的,在每个时间步长内,Kk,1,Kk,2,Kk,3和Kk,4是不同的,它们与(k-1)·dt 时刻的进水量、舰艇横摇角以及横摇角速度有关。
3 模型及求解算法的实验验证
3.1 实验设计
为了验证上述计算模型的准确性,本文设计并进行了船模实验。船体和舱壁均使用2 mm 厚的钢板制作;船模长1.2 m,水线宽0.3 m,高0.7 m;重心坐标为(0 m,0 m,0.16 m);船模重113 kg,平均吃水0.335 m,初始横摇角和纵倾角均为0°。船模的基本外形如图3 所示。
船模共设置7 个液位传感器。其中3 个传感器用于测量3 个实验舱室的水位高度,另外4 个传感器用于测量船艏、船艉、船舯底部以及船舯右舷连杆端的吃水。
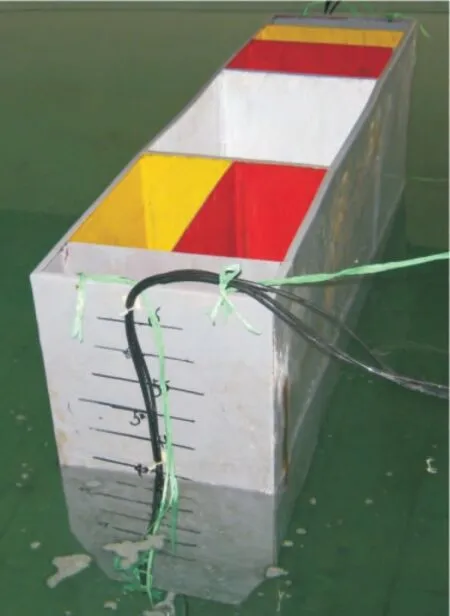
图3 船模外形图Fig.3 Shape of experimental ship model
船模共设置5 个纵向舱壁和1 个横向舱壁,纵向及横向舱壁的设置情况如图4 所示。整个船模共分为3 个区域,其中纵舱壁2 和纵舱壁3 之间为压载区,主要用于放置钢块,调整船模重心的垂向和纵向坐标;纵舱壁1 和纵舱壁2 之间为两舱横向蔓延和不对称单舱的进水过程横摇运动实验区;纵舱壁3 和纵舱壁4 之间为横向对称单舱的进水过程横摇运动实验区。
实验测量装置主要包括液位传感器和信号采集系统。其中液位传感器型号为JPGX3MC4,测量范围0~6 894.76 Pa,即0~1 m 的液位高度,供电电压为24 V 直流电,输出信号为0~5 V 电压信号,测量精度0.1%。信号采集系统是为了实时采集实验过程中的液位变化,采用Visual Basic.net 语言程序编写,可以同时采集和显示8 个通道的测量装置电压信号,并且采集系统还可以指定采样频率。数据采集装置及系统界面如图5 所示。
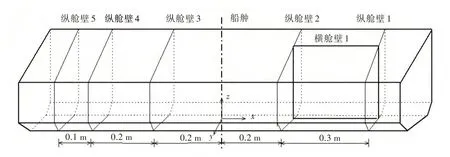
图4 船模舱壁构成图Fig.4 The construction of ship model bulkheads

图5 数据采集界面Fig.5 The interface of data collection
进行3 类横摇运动下进水过程的船模实验,分别为横向对称单舱的进水过程横摇运动实验、不对称单舱的进水过程横摇运动实验及两舱横向蔓延的进水过程横摇运动实验。实验在某大学的某损管与水下训练中心多功能水池中进行。
上述实验涉及到的3 个舱室的具体设置情况如图6 所示。设计的实验内容如表1 所示。

图6 船模的舱室设计Fig.6 Ship model cabins design
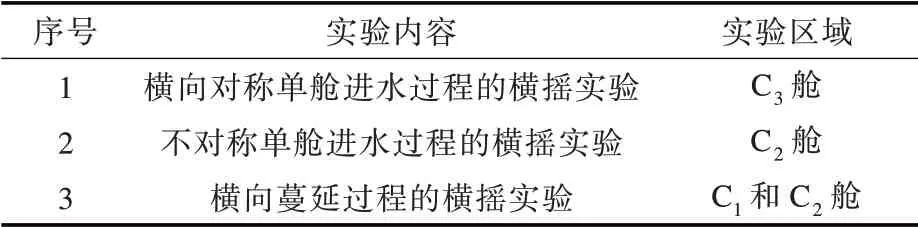
表1 实验内容Tab.1 Experiment content
实验的方法步骤为:首先,将船模置于静水中,使船模横倾于某一初始横摇角,并记录下来;然后,打开和关闭上述实验内容所各自对应的破口,任其自由横摇;最后,通过传感器和数据采集系统记录初始横摇角和进水过程的横摇运动曲线。
3.2 实验结果
本文通过上述3 个进水过程的横摇运动实验,对舰艇横摇进水过程中的姿态参数计算模型予以了验证。实验数据由数据采集系统获得;仿真计算数据则根据求解流程图,利用四阶龙格—库塔算法,通过Visual Basic.net 编程,并结合Access 数据库计算求得。实验测量数据和仿真计算结果如图7~图9 所示,本文主要给出了横摇角的变化情况。图中,3 个初始横摇角度在传感器测量精度较大的角度范围(20°)内选取。

图7 初始横摇角为19.1°时的横向对称单舱进水过程Fig.7 Transverse symmetric cabin flooding process when initial heel is 19.1°
3.3 实验结果分析
经分析图7 可知,在初始横摇角为19.1°时的横向对称单舱进水过程中,实验测得的船模横摇角与仿真结果基本一致,误差在8%之内。

图8 初始横摇角为16.3°时的不对称单舱进水过程Fig.8 Transverse unsymmetric cabin flooding process when initial heel is 16.3°

图9 初始横摇角为18°时的横向蔓延进水过程Fig.9 Transverse spread flooding process when initial heel is 18°
经分析图8 可知,在初始横摇角为16.3°时的不对称单舱进水过程中,实验测得的船模横摇角与仿真结果间的误差相对要大些,最大误差达10%。产生该误差的主要原因是:受实验水池的限制,船模在横摇过程中产生的水波会对自身横摇运动产生影响;实验装置中的传感器信号线是从船模横向引出,由此产生的附加力矩会对船模横摇起到一定的影响;不仅如此,传感器信号线也会浸入到水中,从而受到水波的影响,而这些因素在理论仿真中都无法计算。
经分析图9 可知,在初始横摇角为18°的两舱横向蔓延的进水过程中,实验测得的船模横摇角与仿真值之间有一些差距,最大误差为11.6%。但对于蔓延时间节点的计算,实验测得在第198个采集点(19.8 s)时单舱进水开始向横向舱室蔓延;而仿真结果则是在第215 个采集点(21.5 s)时单舱进水开始向横向舱室蔓延,二者相差较小。
由于C1舱和C2舱是横向对称的,如果二者同时进满水,则最终横摇角为0°,并且在横摇过程中,右倾的横摇角变化与左倾的横摇角变化应该是基本对称的。该过程类似于横向对称舱破损进水,相对安全。然而,当考虑C2舱通过破口向C1舱蔓延的进水过程时,从图9 中可以看出,右倾的横摇角变化和左倾的横摇角变化不再对称,而是在19.8 s 和21.5 s 时分别存在6.8°和6.2°的横摇角。并且在整个进水过程中,船模长期处于向右舷倾斜的状态,这对右舷大角稳性极其不利,船模有可能向右舷倾覆。因此,从这个角度讲,破舱后的中间进水过程将比最终的平衡状态更加危险。
4 结 语
本文通过分析舰艇横摇进水过程的受力,建立了横摇运动微分模型,并构建了数值求解算法。为验证模型和求解算法的准确性,设计了3类不同的进水过程,并进行了船模实验验证。通过对比理论仿真与实验结果,发现实验虽然存在误差,但仍能较好地反映进水过程中横摇运动各参数的变化趋势,表明本文建立的横摇微分模型和数值求解算法能够较好地描述进水过程中船模横摇姿态随时间的变化关系,具有较好的精度。
从横向不对称舱室的蔓延实验中可以看出,在海水的蔓延过程中,会出现长期向某一舷侧倾斜的情况,这对该舷侧的大角稳性极其不利。由此,本文从横摇过程的姿态仿真出发,揭示在进水过程中确实存在比最终平衡状态更加危险的现象。
由于本文建模的前提是不考虑舱室内部水流的激荡作用,因此,激荡作用对舰艇姿态参数计算的影响依然是今后需要重点解决的问题。
[1]浦金云,金涛,邱金水. 舰船生命力[M]. 北京:国防工业出版社,2008:159-303.
[2]侯岳,浦金云,金涛.舰艇进水过程中的不沉性指标计算及实验研究[J]. 船舶力学,2013,17(8):878-887.HOU Yue,PU Jinyun,JIN Tao. Research on ship un⁃sinkability calculation model and experiment of flood⁃ing process[J]. Journal of Ship Mechanics,2013,17(8):878-887.
[3]LEE D,HONG S Y,LEE G J. Theoretical and experi⁃mental study on dynamic behaviour of a damaged ship in waves[J].Ocean Engineering,2007,34(1):21-31.
[4]RUPONEN P. Pressure-correction method for simula⁃tion of progressive flooding and internal air flows[J].Ship Technology Research,2006,53(2):63-73.
[5]RUPONEN P. Model tests for the progressive flooding of a box-shaped barge[D]. Helsinki:Helsinki Univer⁃sity of Technology,2006.
[6]鄢凯,浦金云,侯岳. 舰船破损进水过程的非线性横摇运动仿真[J].舰船科学技术,2011,33(7):14-16,31.YAN Kai,Pu Jinyun,HOU Yue. Numerical simulation research for non-linearity rolling motion of water in⁃gress process on a big ship[J]. Ship Science and Tech⁃nology,2011,33(7):14-16,31.
[7]RPONEN P. Experimental study on progressive flood⁃ing[C]//Maritime Institute of Finland-Seminar,2006.
[8]WRIGHT R A. Improved computer modeling of ship progressive flooding as a design tool[D]. Monterey,California:Naval Postgraduate School,1998.
[9]李庆扬,王能超.数值分析[M].北京:清华大学出版社,2001.
[10]刘子孺,陈家清. 龙格—库塔方法在雷达射线描迹中的应用[J].火力与指挥控制,2009,34(8):175-177.LIU Ziru,CHEN Jiaqing. The application of Run⁃ge-Kutta method to radar ray tracing[J]. Fire Control& Command Control,2009,34(8):175-177.
