大型船舶驾驶室数字化人机工程设计评价方法
2014-02-07钱江余昆颜声远熊巍叶金亮黄杰
钱江,余昆,颜声远,熊巍,叶金亮,黄杰
1 海军装备部舰艇部,北京100841
2 中国舰船研究设计中心,湖北武汉430064
3 哈尔滨工程大学机电工程学院,黑龙江哈尔滨150001
0 引 言
人机工程研究主要是应用人体的特点、能力和限度知识设计机器、系统及作业环境,以保证人员能高效、安全地作业。大型船舶驾驶室是执行航行指挥和监控的中心区域,集中了操舵、操机、监视、安全、灯光及警报等人机媒介,是易于发生人因问题的作业区域[1]。例如:在1992~2005年间,希腊客轮海上事故中的65%是直接由人因问题导致,而其中的76%则发生在船舶驾驶和指挥部分[2];在2000~2006年间日本的船舶搁浅事故中,约73.8%是涉及船员操纵、瞭望和指挥等人因方面的问题[3]。因此,有必要研究大型船舶驾驶室的人机工程设计评价方法,以减少驾驶室的人因失误,保障大型船舶航行安全和整体效能的发挥。
在船舶数字化人机工程设计评价方面,国外的研究较先进,其成果主要为在数字化环境中结合人机设计要素及标准构造专业的数字化设计评价系统。其典型的研究包括:美国将数字化船员模型应用于航母三维设计的作业空间校验[4],以及高速艇座椅的振动隔离系统设计[5]中;将数字化设计技术应用于补给船人机工程评价[6]中;构建了船舶作业人员工作负荷评价系统[7]等。目前,尚示见到国外针对大型船舶驾驶室人机工程设计评价系统研究的相关报道。我国正在逐步开展船舶人机工程设计评价研究,典型的研究包括:在Catia 平台进行舱室可居住性评价[8]以及面板显控布局仿真评价[9];将视景仿真技术用于驾驶舱设备布置的人机关系评价[10]。其不足之处主要体现在:研究内容仅涉及少数舱室设备及布置,评价指标体系不全面;评价技术方法仅支持视景仿真主观感受匹配性评价,无法完成精确的舱室客观工效学参数评价。为此,本文将针对大型船舶驾驶室人机工程设计评价方法进行研究,以构建和完善其评价指标体系、评价理论及数字化设计评价技术方法。
1 驾驶室人机工程评价体系
针对大型船舶驾驶室,构建具有逻辑层次结构关系、多指标关联协调的人机工程评价指标体系,准确描述驾驶室人机关系的基本特征。根据驾驶室人机工程设计要素的组成,从驾驶室观察视域、人机交互设备以及设施、人机关系布局3 个方面进行评价指标层次关系分析,具体的人机工程设计评价指标体系结构如图1 所示。

图1 大型船舶驾驶室人机工程设计评价体系结构Fig.1 Structure of integrated ergonomics design evaluation index system for large ship wheelhouse
其中,观察视域设计评价需要保证驾驶室的指挥/操纵/监视站位及驾驶室翼桥部位具有充足的海面观察视域范围,由窗立柱、上下沿及集控台遮挡形成的观察盲区不影响对重要信息的连续观测。驾驶室的人机交互操纵装置包括舵轮、主机推杆、按钮、旋钮、按键及把手等,需要考虑其形状结构、工效学尺度、布置位置可达性、操纵力、运动方式及范围等因素;显示装置包括仪表、数字显示装置、信号灯和指示灯等,需要考虑其与任务的匹配性、布置位置的可见性,以及认读性、视觉观察感受等。人机关系布局需要保证船员在正常、应急状态都能及时、顺畅、准确地完成操纵任务,保证驾驶室船员具有充足的作业空间、贯通通道,以及对重要部位的快速到达能力。
底层单项评价指标用于刻画大型船舶驾驶室人机工程设计具体的底层评价要素,明确反映驾驶室人机工程某一具体要素的设计状况及存在的具体问题与缺陷。依据船舶相关标准,从客观工效学参数和主观匹配性两个方面进行分析、提取。客观评价指标根据相关的统计数据确定指标值;主观评价指标因涉及主观因素,与人员的舒适性、适宜性感性体验以及主观期望匹配性相对应,因此需要依靠人员的主观认知评判来获取评价数据。将以驾驶室的重要作业设施——船用座椅为例来予以说明(需要保证其对于观测视域及舱室作业环境要求的适应性),图2 所示即为根据GB/T 14774-93 及SOLAS V/15 船舶标准构建的船用座椅人机工程主、客观评价指标实例。

图2 驾驶室船用座椅(B6)人机工程评价指及权重Fig.2 Ergonomics evaluation indexes and weights for ship chairs(B6)in wheelhouse
对于主、客观多指标人机关系综合评价,需要准确集结多层次、多指标及群组主观评价意见,然后通过层次分析法[11]确定人机工程评价指标权重的分配关系:
1)计算主观权重分配成对判断矩阵Cu中第u 行成对比较元素的乘积。




式中:λmax为Cu的最大本征值;R.I.为随机一致性指标。当C.R.<10% 时,评权矩阵本征值的摄动程度在可接受范围内,评权矩阵构建具备思维一致性。图2 中包含有船用座椅(B6)人机工程评价指权重计算结果实例。
2 人机关系价值聚类评价模型
大型船舶驾驶室人机关系评价信息在评价对象之间的分布方面存在差异性,存在主、客观评价信息价值难以准确集结、聚类以进行综合评价的问题。而灰色白化权函数理论在解决不确定性信息的价值聚类方面则具有优势[12]。研究表明,将高斯分布用于构建信息认知程度分布函数具有可行性,且在表达语言值系统不定性普遍分布规律时 具有普适性及有效性[13]。 令 X=[a,d],a ≤b ≤c ≤d,构建基于高斯分布型的人机关系评价不定性信息认知程度白化权函数模型:

在实际应用中,x 的取值范围截断为[a,b]才有意义。f(x)的取值范围由[0,1]调整到[ε,1],0 <ε <1。系数σ 决定线型的分布幅度:越小,线型的分布越集中陡峭;反之,则趋于分散。系数σ 的取值与分布区间的长度和相邻白化类交叉点φ 有关,可通过分布区间的长度和ε 的取值确定:

式中,D 为分布区间长度,D=|b-a|或|d-c|。基于中心点高斯分布白化权的价值聚类综合评价模型的构建步骤如下:
1)人机关系评价价值灰类的划分:依据对应的评价准则及要求划分出s 个评价价值灰类区间,[a1,a2),[a2,a3),…,[ak,ak+1),…,[as,as+1),通常,2 ≤s ≤9,评价价值灰类通常不超过9 个。
2)人机关系评价价值灰类的延拓:将人机关系价值灰类向前、后两个不同的方向进行延拓,增加0 价值灰类和s+1 价值灰类。
3)确定人机关系评价价值灰类中心点λ1,λ2,…,λs,以作为价值灰类白化值;并确定延拓灰类区间中心点λ0,λs+1,得到s+2 个价值灰类区间中心点序列。
4)采用高斯分布白化权函数模型,分别连接第k 评价价值灰类中心点坐标(λk,1)与第k-1,k+1 价值灰类中心点坐标(λk-1,0)及(λk+1,0),得到评价指标j 关于k 评价价值灰类白化权函数(k=1,2,…,s),如图3 所示。

图3 人机关系高斯分布白化权函数灰色聚类评价模型Fig.3 Gray clustering evaluation model based on Gauss Whitening Function for man-machine relations
依据我国的评价习惯,将大型船舶驾驶室人机工程设计评价结果划分为5 个价值灰类:极差灰类(1)、差灰类(2)、一般灰类(3)、良灰类(4)和优灰类(5)。对应的价值灰类区间划分分别为:和对人机关系5 个评价价值灰类取值区间进行延拓处理,计算出各灰类的中心值向量为(0,25,40,60,85,100,105) 。根据式(6)计算分布系数σ1,σ2的取值,取限值ε=0.01,则φ=0.316 2 <0.5。分别计算划定的5 个评价价值灰类的中心点高斯分布型白化权函数:


对于递阶层次结构的多指标驾驶室人机工程综合评价,评价对象i(i=1,2,…,n)关于价值灰类k(k=1,2,…,s)的综合评价合成聚类系数为

式中,ηj为人机工程评价指标j 的综合聚类权重。若则认为人机关系对象i 属于评价价值灰类k*。
3 人机工程评价系统构造
构造数字化的大型船舶驾驶室人机工程设计评价系统,以高效、直观地实施人机工程综合评价、评价结果集成,以及量化与分析。
3.1 人机仿真客观评价环境
人机仿真客观评价环境用于实现与人体尺度相关的船舶驾驶室的布置、视域、可见性、可达性以及作业空间等操纵、使用规范性问题的评价。客观评价环境包括数字化船员人体模型、驾驶室三维模型库及评价软件的开发。采用UG/OPEN API 开发图形化的船员人体模型,人体模型尺寸数据库以国标《中国成年人人体尺寸》为依据。船员人体模型划分为头部、躯干、上肢、下肢及功能域5 个部分:头部包括头、鼻桥点、颈;躯干包括胸、腰、臀3 个部分;上肢包括肩关节球、上臂、前臂和手4 个部分;下肢包括大腿、小腿和足3 个部分。评价功能域包括眼睛可视域、手部可达域及自然视线3 部分,具体如图4(a)所示。图形化的船员人体模型的肢体和功能域的特征被抽象成几何实体,如头部、胸部、臀部为方体,大腿、小腿为锥台体,可达域为透明的锥体和半球形,具体如图4(b)所示。图形化的人体模型表现了船员人体的宏观几何特征,可以提供精确的人机工程评价所需的基准测量点、线、面。

图4 图形化的评价船员三维人体模型Fig.4 The graphics of shipman's human body model
根据系统评价结构和各评价模块功能的要求,创建评价菜单和交互式评价用户界面,实现评价数据输入和评价操作命令。建立UG/OPEN API的Visual C++的MFC 开发工程,调用libufun.lib,libugopenint.lib 动态函数库以开发评价程序。采用MenuScript 脚本语言编辑评价系统菜单,运用UIStyler 建立交互式船舶驾驶室人机工程评价用户界面,用户界面在MenuScript 评价菜单被调用,并将评价计算程序与UG NX 设计环境完全融合,以实现设计与评价的实时交互。同时,采用UG NX建立船舶驾驶室数字化三维模型标准件库,使其具备准确的结构特征、精确的尺寸参数、良好的可修改性以及工程平台间的转换重用性。客观评价环境集成了船员人体模型、驾驶室模型库、评价界面、评价菜单、评价指标及权重等,如图5 所示。实现了大型船舶驾驶室数字化三维快速设计和人机工程精确测量评价、实时评价改进以及人机关系数据管理能力。

图5 基于UG NX 的驾驶室集成人机仿真评价环境Fig.5 Objective integrated evaluation environment for wheelhouse based on UG NX
3.2 视景仿真主观评价环境
主观评价环境用于完成船舶驾驶室人机工程适宜性、审美等描述指标的感性体验、与人员主观期望的匹配性评价。大型船舶驾驶室人机关系主观评价环境基于EON 平台构建,在虚拟工具及数据库的支持下产生与评价任务相适应的、真实的、适人化的驾驶室视景仿真评价环境。船舶驾驶室人机关系主观评价信息依赖视觉和听觉获取的信息,主观评价环境需具备:逼真的驾驶室内部环境视、听觉效果;逼真的外部海洋、天空环境、自然照明效果;视景仿真环境漫游、观测视角自然切换等交互行为。图6 所示为开发的EON 驾驶室主观评价环境。
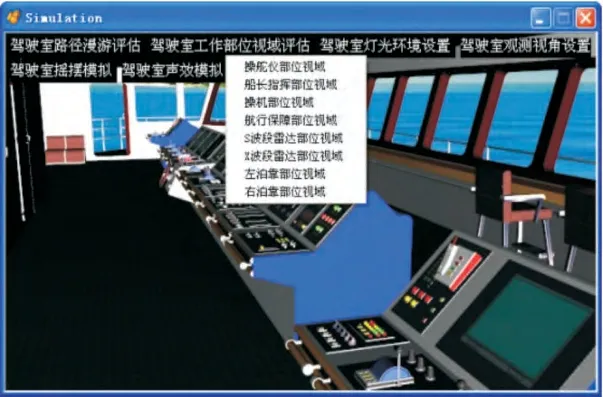
图6 驾驶室人机交互视景仿真主观评价模型Fig.6 Interaction virtual simulation subjective evaluation model for wheelhouse
主观评价模型的基本结构实现了驾驶室几何模型、色彩、材质、灯光照明、外部海洋、波浪、天空、岛屿及自然环境照明等的视景仿真,实现了设备报警、运转噪声和海浪声效的模拟,以及驾驶室内部操纵杆、舵轮、门等的运动模拟。评价人员可以根据视听信息以及自身的判断,来实现对船舶驾驶室环境视域、色彩、照明及整体环境等的主观适宜性、期望匹配性及感性体验等的评价。
3.3 驾驶室人机工程评价实例
以某型正常排水量为17 000 t 的多用途大型船舶驾驶室为例,对其驾驶室的人机工程设计进行人机仿真及视景仿真评价。在UG NX 客观评价环境中,调用驾驶室模型库显控装置、集控台、船用座椅、窗、立柱、甲板、墙壁、扶手及门等标准件进行组合、装配,以快速、准确地构建出船舶驾驶室三维模型;调用评价船员人体模型,将坐、立姿船员人体模型准确装配至指挥、导航、操纵和监视等作业位置,以构建船员人体模型和驾驶室模型的客观人机关系模型,具体如图7 所示。

图7 驾驶室客观人机空间位置关系模型Fig.7 Man-machine space relation model of wheelhouse
结合UG NX 的角度分析功能模块,选择鼻桥点和2 个测量点进行视域测量评价。操舵仪部位的视域评价项目:结合UG NX 角度分析功能模块,选择船员人体模型鼻桥点和水平基准面与前窗立柱外延线相交的2 个测量点来实施3 点视域测量评价。图8(a)所示为在船舶驾驶室前窗位置,船员向外观察的视角测量评价示例;图8(b)所示为驾驶室显示仪表、船用座椅及旋钮的虚拟测量评价示例。

图8 驾驶室精确测量评价示例Fig.8 Measurement evaluation cases for wheelhouse
对于视景仿真主观评价,可根据Turner 等[14]的可用性评价问题发现公式found=1-(1-p)n(p为发现问题可能性,通常取p=0.30~0.40;n 为评价人员数量),选取6 名评价人员基本上就可以发现并解决88.2%~95.3%以上的评价问题。船员以第一视角在船舶驾驶室内漫游,并向外部观测,以主观体验评价驾驶室的视域设计效果。图9 所示为驾驶室操舵仪部位船员观察视域主观评价环境实例。

图9 驾驶室操舵仪部位船员视域主观评价示例Fig.9 Subjective evaluation cases for vision field in wheelhouse
为了提高人机关系价值聚类评价矩阵信息计算的效率和准确性,运用matrixvb 混合编程技术开发可价值聚类综合评价软件界面,如图10所示。
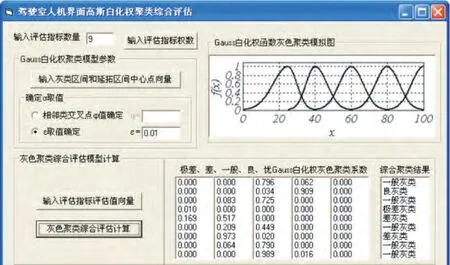
图10 高斯白化权函数价值聚类评价软件界面Fig.10 Evaluation interface for grey clustering evaluation model based on Gauss Whitening Function
同理,还需完成多用途大型船舶驾驶室人机工程其他设计要素的主、客观评价。船舶驾驶室人机工程设计综合评价结果如表1 所示。

表1 驾驶室人机工程综合评价结果Tab.1 Ergonomics evaluation results for wheelhouse
由综合评价结果可知,该多用途大型船舶驾驶室人机工程总体设计的主、客观综合评价聚类系数结果大部分处于一般灰类水平。其中,泊靠位置视域(A2)的客观评价结果及船用座椅(B6)的主观评价结果处于差灰类;操纵装置(B1)的主、客观评价结果、显示装置(B2)的主观评价结果、警报(B3)的客观评价结果,以及集控台(B5)的主、客观评价结果与作业空间布局(C4)的客观评价结果处于良灰类;其余人机关系子因素的主、客观评价结果均处于一般灰类,表明驾驶室作业域(指挥/操纵/监视视域)、泊靠位置视域、驾驶室窗、显示装置以及船用座椅、软件界面系统及人机关系布局均需要进一步优化。驾驶室人机关系子要素的具体评价指标大部分处于一般灰类(限于篇幅,这里不给出具体的评价指标结果),尤其是在观察视域、船用座椅以及显示装置的主观指标中,有部分具体评价指标结果还处于差与极差灰类,不符合标准的基本限值要求,必须对设计值予以改进。例如,船长指挥部位视域:正横向后两侧的观察视域范围分别为0.89°和0.53°,均小于标准最小极限值22.5°;指挥部位的全部视域范围为181.4°,小于标准最小极限值225°,因此建议增加驾驶室两侧向后开窗的范围,指挥部位前移。
4 结 语
本文研究了大型船舶驾驶室人机工程设计评价理论及数字化评价技术方法,构建了大型船舶驾驶室人机工程评价指标系统,提取了具体的底层单项评价指标,确定了评价指标权重分配的关系;提出一种驾驶室人机关系评价信息综合价值聚类评价方法,为大型船舶驾驶室人机关系综合评价提供了理论方法与支持。
通过构造大型船舶驾驶室人机工程设计数字化评价系统,集成评价船员人体模型、驾驶室模型库、评价指标体系、权重分配、综合评价理论及主、客观评价环境,实现了对于人机关系客观参数规范性问题的准确的人机仿真测量评价,以及对于人机关系适宜性、舒适性和审美等人员感性体验、主观期望匹配性的视景仿真评价。数字化的人机工程设计评价方法可以提高驾驶室人机关系评价效率,其评价结果可靠,评价过程直观,在工程设计中具有实用价值。
[1]MULLAI A,PAULSSON U.A grounded theory model for analysis of marine accidents[J]. Accident Analysis and Prevention,2011,43(4):1590-1603.
[2]GEMELOS L,VENTIKOS N. Accidents in greek coast⁃al shipping:human factor and old ships…or maybe small ships?[C]//International Symposium on Mari⁃time Safety,Security and Environmental Protection.Athens,Greece,2007:1-42.
[3]李东宁,朱怀伟,郑中义. 船舶搁浅致因分析研究[J].交通世界,2009(11):276-279.
[4]吕波,赵建辉.国外舰船数字化设计技术应用最新进展[J].船舶物资与市场,2010(3):35-38.
[5]COE T E,XING J T,SHENOI R A,et al. A simplified 3-D human body-seat interaction model and its appli⁃cations to the vibration isolation design of high-speed marine craft[J]. Ocean Engineering,2009,36(9):732-746.
[6]DALPIAZ T M,EMMRICH M,MILLER G,et al. Con⁃ducting a human factors engineering 3-D computer modeling ship design review[C]//Human Systems Inte⁃gration Symposium.Arlington,VA,2005.
[7]RICCO S,SERPAGLI S,SIMONE S. Research study for the development of a methodology and a tool for the human factors engineering application in ship design[C]//Royal Institution of Naval Architects Internation⁃al Conference,Human Factors in Ship Design,Safety and Operation,2007.
[8]闫洪囡. 船舶居住舱室人—机—环境评价系统[D].哈尔滨:哈尔滨工程大学,2008:43-52.
[9]SHANG Z,JIANG J. Virtual simulation evaluation of the human-computer interface of a display and control device[C]//2010 International Conference on Electri⁃cal and Control Engineering(ICECE). Wuhan,China,2010:2532-2535.
[10]商蕾.基于视景仿真的船舶驾驶舱人机工程设计评价研究[J]. 武汉理工大学学报:交通科学与工程版,2011,35(4):840-844.SHANG Lei. Research on bridge man-machine engineering evaluation based on visual simulation[J].Journal of Wuhan University of Technology(Transpor⁃tation Science & Engineering),2011,35(4):840-844.
[11]ZHANG S,HU F,WANG S,et al. Application of AHP to tobacco enterprise performance appraisal[C]//Proceedings of the 21st Annual International Confer⁃ence on Chinese Control and Decision Conference,2009:2552-2555.
[12]谢乃明.灰色系统建模技术研究[D].南京:南京航空航天大学,2008:11-14.
[13]QIN K,XU K,LIU F,et al. Image segmentation based on histogram analysis utilizing the cloud model[J].Computers & Mathematics with Applications,2011,62(7):2824-2833.
[14]TURNER C W,LEWIS J R,NIELSEN J. Determining usability test sample size[J]. International Encyclope⁃dia of Ergonomics and Human Factors,2006,3:3084-3088.
