一种干扰条件下的水底监测层网络体系结构
2014-01-31陈秋丽何明郑君杰陈希亮王立辉
陈秋丽,何明,郑君杰,陈希亮,王立辉
CHEN Qiuli1,HE Ming1,ZHENG Junjie2,CHEN Xiliang1,WANG Lihui3
1.解放军理工大学指挥信息系统学院,南京210007
2.解放军理工大学气象海洋学院,南京210010
3.东南大学仪器科学与工程学院,南京210096
1.College of Command Information Systems,PLA Science and Technology University,Nanjing 210007,China
2.College of Marine Meteorological,PLA Science and Technology University,Nanjing 210010,China
3.School of Instrument Science and Engineering,Southeast University,Nanjing 210096,China
1 引言
海洋资源的开发与利用,日益受到世界各国的重视。潜艇的出现、战略核潜艇作为威慑力量的发展,更增加了海水介质中信息传递的重要性。为了进一步提高人们对海洋环境的认识,水声传感器网络的设计和分析越来越受到人们的关注[1]。马航海上搜寻、军事海域争端、海洋资源争夺等一系列问题都指出研究水声传感器网络对解决海洋监测问题和提高国家海防水平具有十分重要的意义。
水声调制解调技术与传感网络理论模型研究的深入,使得水声传感器网络的应用得到进一步推广。由于水声传感器网络系统应用的特殊性,根据各类节点的位置及功能的不同,整体可分为水底监测层、水中监测层和水面监测层[2]。文献[3]提出了可以提供低误码率通信的树状层次结构,但没有讨论层次之间的通信干扰问题。文献[4]采用自顶向下的方法探究了大型移动水声传感器网络设计上的挑战,详细分析了水声移动传感器网络每一层的架构,但其对层次之间的通信抗干扰方法阐述过少。文献[5]提出了一种水声传感器网络安全架构模型,但其对如何解决传感器数据交互干扰等安全问题没有给出具体方案。文献[6]以典型的传感器节点为例,讨论了主要的节能方向,但尚未解决数据通信等技术问题。文献[7]讨论了水声传播如何影响水声传感器网络不同层次之间的通信性能,剖析了水声传感器网络面临的挑战。
可见,提升水声传感网络的通信能力,维护网络协议顺利运行,确保网络整体效能,急需设计适应多种水下干扰环境的水声传感网络体系结构。然而,水底监测层为整个水声传感器网络提供信息支持,地位十分重要。尤其是水底监测层的节点大多被布设在水下,带宽的距离限制、物理电路的质量约束,以及节点部署是否合理等相关问题,都对水声传感器网络的性能提出了挑战。
针对水底监测层的特殊性,本文设计了一种干扰条件下确保网络通信性能的分层体系结构。从逻辑分层的角度将底部安装的传感器和集电极视为运行在不同层。由于集电极层的节点数量大大小于传感器层的节点数量,通过分析不同节点间距之间通信频率与信噪比的关系,可分别求得传感器层与集电极层的最优工作频率,使其分别采用不同的通信频率进行同层之间的交互。由于信息传输频率和接收频率可以不同,设置集电极层的接收频率为传感器层的最优工作频率,集电极层在收到传感器层发来的消息后,采用本层最优工作频率将信息交付给上层。该方法可有效减少两个层次之间的通信干扰,仿真实验也验证了该方法的可行性。
2 相关工作
距离为l、信号频率为f的路径损耗,计算公式如下[1]:

a(f)为吸收率;k为传播因子。实际情况下,k=1.5。吸收率通过经验获得,a(f)单位为dB/km,f单位为kHz,得到公式(2):

海洋环境噪声来源于洋流、海运、波浪和热噪声。利用高斯统计和功率谱密度(PSD)可描述各类环境下的噪声来源。上述4个噪声来源的功率谱密度如公式(3)所示:
其中,s为海运活动因子,0≤s≤1,ω为风速(m/s)。故环境噪声的整体功率谱密度为:

采用S(f)表示发射信号的功率谱密度,则根据衰减A(l,f)和噪声功率谱密度N(f)[1],可得到距离为l情况下的信噪比,窄带信噪比SNR计算公式如下:

由公式(5)可以看出,对于每个传输距离l都存在一个频率f0(l)使得窄带SNR最大。因此本文考虑在干扰情况下,选择合适的工作频率,确保窄带SNR最大。图1展示了最优工作频率f0(l)与距离l的关系,观察可得,随着距离l的增大,为获得最大窄带SNR,最优工作频率f0(l)的取值越小。

图1 距离l不同时,信噪比与频率的关系
3 体系结构设计
3.1 水声传感器网络三层体系结构
水声传感器网络按功能划分如图2所示[2]。
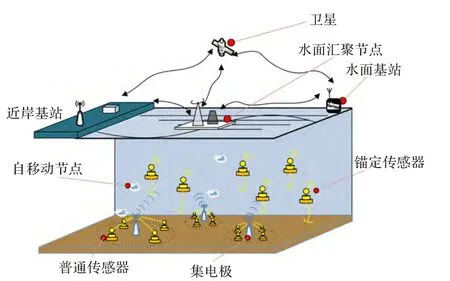
图2 水声传感器网络三层体系结构
(1)水底监测层:该层中的传感器节点主要布设在水底,包括普通传感器节点和集电极节点,主要利用声通信的方式将信息发送给上层系统。
(2)水中监测层:该层中的传感器主要悬浮在水中,包括不能自主移动锚定传感器和自组织航行器,它们将从水底层接收的信息和自身搜集到的信息传送给上层系统。
(3)水面监测层:该层中的传感器主要由水面上的无线传感器节点构成,包括用于感知水面二维平面内信息的普通感知节点,以及将搜集的监测信息进行汇集的汇聚节点。监测信息最终由汇聚节点通过船舶、卫星或近岸基站传送给用户。
3.2 干扰条件下的水底监测层体系结构
本文所提出的体系结构主要针对的是水底监测层中的节点。如图3所示,将该层中的节点分为传感器层和集电极层,利用通信理论方法分析网络性能,分别找到传感器层和集电极层的最优工作频率,在避免交叉干扰的前提下保证网络畅通。
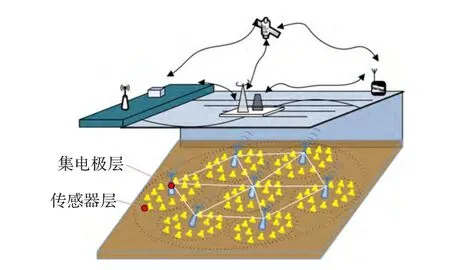
图3 水底监测层分层体系结构示意图
底部安装的传感器构成水底监测层的第一层,每个单元中的传感器经过多跳将信息转寄给单元中心的集电极站。这些集电极站构成水底监测层体系结构的第二层。同时,集电极站将相关信息也利用多跳转寄给本层的中心集电极。由于传感器间的距离远短于集电极间的距离,故根据水声传感器网络的频率-距离的相关性(图1所示),传感器到传感器之间的传输使用更高的工作频率。频域中的正交性保证了传感器到传感器传输不会给集电极到集电极之间的传输产生干扰,反之亦然。
3.2.1 集电极网络结构
由于集电极安装在网络底部,且均匀分布。假定网络区域为半径为r的圆,给定集电极数量为K,网络区域A,则水底监测层中集电极的密度为:

对于均匀分布的集电极,它们之间的距离为:

其中,c是依赖于节点配置的常量,一般取值为1。
3.2.2 传感器网络结构
假定网络中均匀分布N个传感器。由于有K个集电极,所以每个集电极拥有N集=N/K个传感器。每个集电极的覆盖区域(单元)为A集。因此,传感器密度为:

4 仿真与实验
假定测试区域为A=5 000 km2的圆形网络,衰减模型由方程(1)给出,忽略网络的固定损耗。假定每个节点的传输信道均具有衰减。传播因子为k=1.5,噪声活动因子为s=0.5。为了方便讨论,假设海域较为平静,设定风速为ω=0 m/s,帧大小为L=100 bit。均匀部署5 000个传感器和150个集电极在区域A上。
图4表明了集电极、传感器最优工作频率与节点密度的关系。观察发现,集电极层的最优工作频率与传感器层的最优工作频率相差很大。图4中集电极数为K=150时,节点密度为150/5 000=0.03。它的工作频率为fo(l集)=27.5 kHz。由于每个集电极单元的传感器数为N传=33,节点密度为33/50=0.66。则传感器的工作频率为fo(l传)=100 kHz。因此,当传感器以100 kHz传送信息,集电极以100 kHz接收信息,27.5 kHz传输信息时,存在一个适当的频率分隔来保证水下分层传感网络的正常运行,使其免受集电极层和传感器层的交叉干扰。
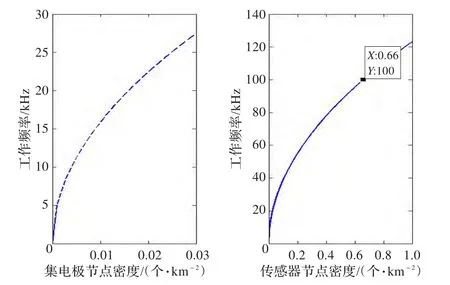
图4 集电极层、传感器层最优工作频率选择示意图
5 结束语
本文研究分析了存在干扰情况下的水声传感器网络的通信理论,为水底监测层设计了新的节点部署体系结构。研究发现,通过选择合适的工作频率可确保水底监测层为水中、水面监测层提供更加可靠的信息,有效避免不同层之间信息传递的交叉干扰,提升了水声传感网络的自身性能。本文通过仿真实验验证了上述分析的正确性,下一步则将针对具体网络,提供合理的工作频率以确保网络连通,解决实际应用问题。
[1] Climent S,Sanchez A,Capella J V,et al.Underwater acoustic wireless sensor networks:advances and future trends in physical,MAC and routing layers[J].Sensors,2014,14(1):795-833.
[2] 何明,梁文辉.水下移动无线传感器网络拓扑[J].控制与决策,2013,28(12):1761-1770.
[3] Dashtestani H,Cotae P,Moskowitz I S.On the optimal placement of underwater sensors in a tree shaped multihop hierarchical network[C]//2013 47th Annual Conference on Information Sciences and Systems(CISS),2013:1-6.
[4] Cui Junhong,Kong Jiejun,Gerla M,et al.The challenges ofbuildingmobileunderwaterwirelessnetworksfor aquatic applications[J].Network,2006,20(3):12-18.
[5] Tian C,Liu W,Jin J,et al.Localization and synchronization for 3D underwater acoustic sensor networks[M]//Ubiquitous Intelligence and Computing.Berlin Heidelberg:Springer,2007:622-631.
[6] Anastasi G,Conti M,Francesco M D,et al.Energy conservation in wireless sensor networks:a survey[J].Ad Hoc Networks,2009,7(3):537-568.
[7] Heidemann J,Stojanovic M,Zorzi M.Underwater sensor networks:applications,advances and challenges[J].Philosophical Transactions of the Royal Society A:Mathematical,Physical and Engineering Sciences,2012,370(1958):158-175.