注塑机双曲肘合模机构动力学建模
2014-01-18杨丁刘帅阮宇飞崔树标
杨丁,刘帅,阮宇飞,崔树标
(1.四川职业技术学院机械工程系,四川 遂宁 629000;2.华中科技大学材料科学与工程学院,湖北 武汉 430074)
在塑料注射成型加工中,注塑机是影响制品质量和成型效率的关键因素之一.合模机构是注塑机的重要组成部分.其作用是闭合模具,提供锁模力,在模腔内注入高压物料时能保持模具的闭合状态,成型完成时能克服制品对模具的附着力打开模具[1].合模机构主要分为三类:全液压式、肘杆式和复合式[2].目前电动双曲肘合模机构因其良好的运动特性和较高的机械效率广泛应用于全电动注塑机中,本文重点分析全电动双曲肘合模机构并进行动力学建模,为全电动双曲肘合模机构的设计和优化提供理论基础.
1 双曲肘合模机构
全电动双曲肘合模机构以伺服电机作为动力源,通过滚珠丝杠螺母副驱动曲肘机构的十字头等元件,十字头与肘杆机构配合将旋转运动转化为开合模方向的直线运动.带动曲肘连杆机构实现动模板的往复移动,并完成开模、合模及锁模的动作,其机构如图1所示,
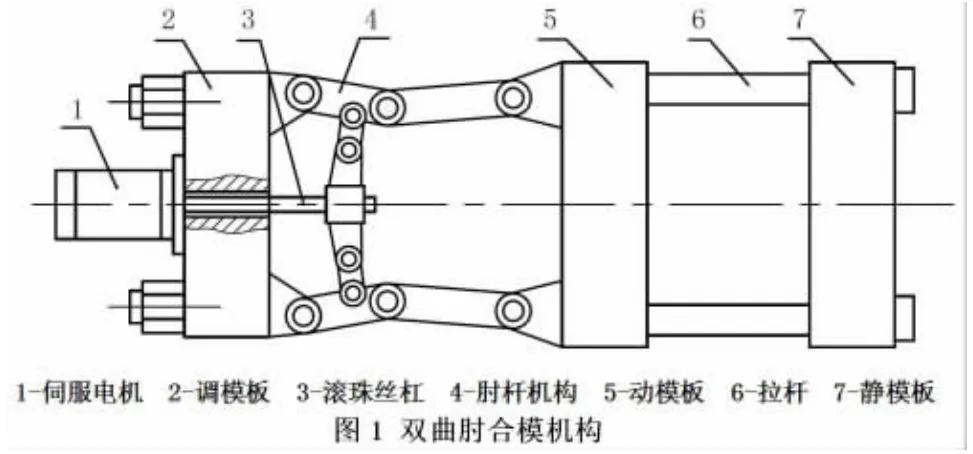
双曲肘合模机构工作原理为:当电机正转时,滚珠丝杠螺母副带动肘杆机构推动动模板向前运动,当模具的分型面接触时,肘杆机构尚未形成一线排列,动模板受到变形阻力,此时电机降低转速,增大扭矩,不断增加滚珠丝杠螺母副上的作用力,直至克服变形应力,使肘杆成为一线排列[3].合模机构的弹性变形对模具实现了预紧,该预紧力即为合模力.开模时,电机反转,在滚珠丝杆作用下,肘杆的一线排列被拉下,动模板与定模板分离并退回到初始位置,实现开模.
2 双曲肘合模机构动力学建模
2.1 坐标定义
首先定义合模机构中的五个铰链分别为A,B,C,D,E,其中 A与十字头相连,E与动模板相连,B、C、D三点在运动中相对位置不变.以C点为原点建立坐标系,如图2所示,则A,B,C,D,E五点对应的坐标定义为 (XA,YA),(XB,YB),(XC,YC),(XD,YD),(XE,YE).

2.2 结构分析
为了便于分析,将图2简化为图3所示的机构.
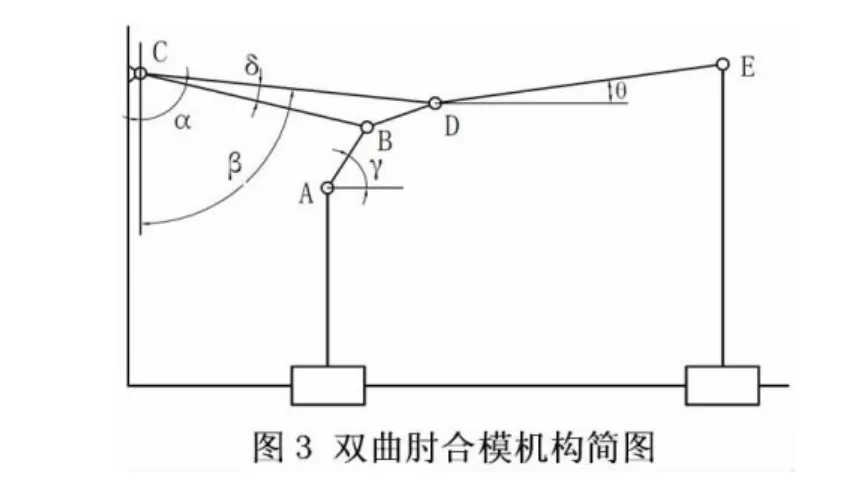
图3中A,B,C,D,E点对应于图2中同名的铰链,左滑块对应于合模机构中的十字头,右滑块对应于合模机构中的动模板.可将图3的机构分解为图4的两个滑块摇杆机构.
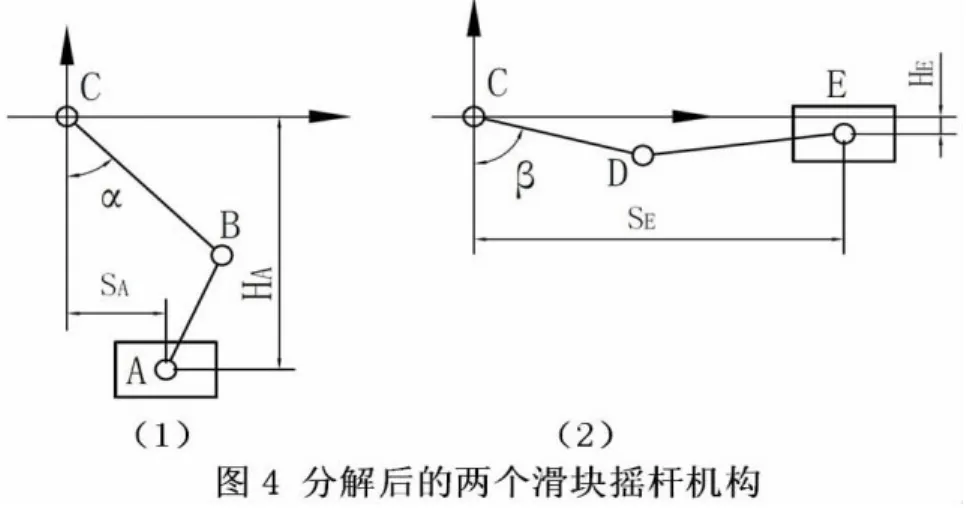
图4中SA、SE分别代表A、E点到原点的水平距离;HA、HE分别代表A、E到原点的铅垂距离.因为B、C、D三点的相对位置不变,则运动过程中δ角不发生改变.以滑块A的水平移动为输入通过图4(1)可以求出SA与α之间的对应关系;再通过图4(2)可求出β与SE之间的对应关系,从而得到滑块A与滑块E的对应关系.
2.3 机械结构计算
由图4(1)可以得到以下三个方程:

其中LAB,LBC分别为杆AB,BC的长度,因此,式中的未知条件仅为A点位置SA和α角,这样就可以得到α角用SA表示的函数关系α=F(SA).

由图3可知α角与β角的函数关系:

由图4(2)可以得到以下方程:

因为HE,LCD,LDE为已知值,通过联立三个方程可以得到SE与β角的关系,即SE=F(β),可以得到如下方程:

联立方程(1)、(2)、(3)即可得到 SA与 SE之间的关系.
2.4 力和速度的分析
为精确控制注塑机合模机构的动作,除了对其进行运动学建模,其力学模型也显得非常重要.在力学分析中关键是求出机构的力的放大比和速度比.
合模机构的力的放大比是指滚珠丝杆作用在十字头的推力与机构产生的推动动模板运动的移模力的比值.忽略摩擦,转动惯量和质量等的情况下,合模机构的力学分析简图如图5所示.

图5中杆AB,DE是二力杆,只受到两端处大小相等、方向相反的力的作用.在机构中A点跟随十字头作水平运动,A点所受到AB向的力FA是水平力F1和垂直方向的FN1的合力.由此可知,.E点的受力情况与 A点相似,则.
B点和D点其相对位置不变,且绕C点进行转动,所以在工作过程中B点和D点相对于C点处的力矩大小相等,方向相反.其方程如下:
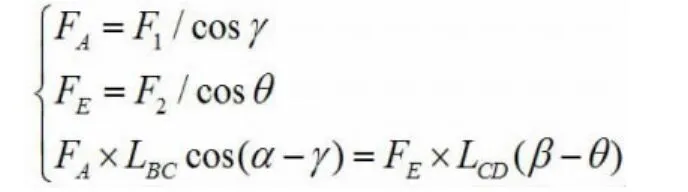
则合模机构的力的放大比为:

根据输入和输出的功率守恒可得到动模板和十字头的速度的比:

3 结论
利用机构学方法对全电动注塑机的合模机构进行了运动学建模,得出了合模机构中十字头的位移与动模板位移的运动学关系;通过力学分析,得出了合模机构对动模板的推力与滚珠丝杆副对机构推力的比值和相应的速度比值,为全电动注塑机合模机构的设计和优化提供了有益的理论基础.
[1]王兴天.注射成型技术[M].第一版.北京:化学工业出版社,1999:16-29.
[2]许颖,方子帆.注塑机合模装置的结构及发展[J].机械工程师,2006(1):119-122.
[3]王鸣.注塑机双肘杆合模装置的设计[J].电源技术应用,2013(6):287.
