激光引信脉冲回波的变系数相关检测法
2014-01-13钱荣朝桂延宁董卫斌
钱荣朝,桂延宁,董卫斌,王 刚
(1.西安机电信息技术研究所,陕西 西安710065;2.机电动态控制重点实验室,陕西 西安710065)
0 引言
激光引信是随着激光技术发展而出现的近炸引信技术,激光引信具有启动位置控制精度高和抗电磁干扰强等特点。但是,激光引信也有抗环境干扰差的弱点[1],因此对激光引信环境特性研究成为一项重要内容[2]。激光引信受天气环境如云雾的影响较大,云雾是相对密集的悬浮粒子所组成的散射体,当散射微粒尺寸相当于或大于光波长时通常认为会产生米氏散射[3-4],云雾后向散射回波与目标反射回波功率相当或更大,产生的回波信号可能会对引信探测系统造成干扰或引发虚警。从回波信号处理的角度对激光脉冲弱信号的检测,前人已经提出了一些相关的方法:如利用互相关检测技术对远距离、恶劣环境、回波信噪比低的情况进行信号处理[5];通过选取不同延迟时间对接收信号互相关检测,通过大量实验数据找到并设定正确的延迟时间来提高和改善信噪比[6]。这些方法都是用模板信号检测数据长度相同的待测信号,对引信系统用数据量低的窄脉冲模板检测数据量高的回波信号,这些方法并不适用,不能实时有效提取目标信息,针对这一问题,本文提出滑动窗变系数相关检测法。
1 相关检测原理和云雾散射的激光雷达方程
1.1 相关检测原理
相关检测主要是利用信号相关性和噪声随机性的特点,通过自相关或者互相关运算,达到去除噪声、检测出信号的目的。
互相关检测原理[7]:互相关运算流程图如图1所示,已知的有用信号s(n),与数据长度相等的待测离散信号x(n)=s(n)+u(n),进行相关运算,u(n)为背景高斯白噪声,n 为离散信号对应的采样点数。互相关检测公式可以表示为:

式中N 为数据长度,m 为偏移量。相关系数rss(m)表示有用信号的自相关函数,rus(m)表示信号与噪声互相关函数,由于噪声与信号相关性很小,从而实现对噪声的抑制。比较相关系数的阈值υ,提取目标信息。
图1 互相关运算流程图Fig.1 The flow diagram of the cross-correlation operation
1.2 云雾散射的激光雷达方程
液态的云雾粒子由于其表面张力和自身重力的作用,基本呈球形或椭球形,其半径大多数为一微米至十几微米之间,云雾粒子半径r和激光波长λ满足2πr/λ>0.3,适用于用米氏散射理论来计算[8],云雾散射激光雷达方程[9-11],对于空间粒子团接收激光功率为:

扩展目标的反射光功率为:

式中P是激光雷达接收的大气后向散射光的回波功率;C 是激光 雷达系 统 常 数;βsc 是 后 向 散 射 系 数;βex是消光系数,a(R),ar(R)为距离相关的功率衰减系数,r为目标反射率。
2 滑动窗变系数相关检测法
2.1 滑动窗变系数原理
滑动窗是利用发射脉冲信号数据作为窗函数在时间轴上滑动,对回波信号进行匹配,对应数据段与模板数据(发射脉冲信号数据)作相关运算,利用相关系数确定不同时刻两组数据的相关程度。由于激光引信发射占空比很低的脉冲信号,对接收信号过阈值的部分逐点滑动进行运算,对零数据段信号直接滑过节约时间。
变系数修正:根据激光雷达公式,回波信号功率受距离R 的影响,目标反射信号和发射脉冲信号功率幅度差异很大。对回波信号数据乘以与距离相关的变系数提高功率幅度,设定变系数K(R)为距离相关的增函数,乘以回波信号数据,使得目标反射回波功率与发射脉冲功率最接近,从而相关运算时受距离的影响最小。
2.2 滑动窗相关检测法步骤
滑动窗变系数相关法运算步骤如图2所示。
1)读取回波的功率幅度信号。
回波功率幅度信号x(n)可以表示为:

其中p(n)为目标反射回波的功率幅度信号,可以表示为:


ρ为目标反射率,s(n)为发射脉冲信号。cld(n)为云雾粒子团后向散射回波的功率幅度信号。u(n)为背景高斯白噪声,α(R)和αr(R)由式(2)、(3)激光雷达公式求得。
2)对非零数据进行处理,对零数据段直接滑过。
3)回波功率幅度信号乘以测试经验函数K(R),修正距离引起的功率幅度差异。
4)发射脉冲信号数据作为滑动窗函数,逐点滑动匹配回波信号,与模板数据(发射脉冲信号数据)对应点乘积求和。
5)乘系数1/Np,得到相关检测值为:
存入寄存器,Np表示过阈值的连续采样点数,通过Np系数调整对不同脉宽的相关检测值,若Np<no,no为滑动窗模板样点数,则对回波信号数据补零为长度no,令Np=no,乘系数1/no然后进行运算。若Np>no,则乘系数1/Np然后进行运算。rsu表示为白噪声与信号的相关函数,rsp包含信号的自相关函数,rscld表示为云雾后向散射回波与信号的相关函数。
6)利用相关系数的阈值判别提取目标信息。
图2 滑动窗变系数相关法步骤图Fig.2 The flow diagram of the variable coefficient correlation method by using the sliding windows
3 仿真验证
3.1信号仿真
3.1.1 发射信号波形构建
激光器发出的窄脉冲信号峰值归一化的高斯波形如图3所示,对应模板数据s(t)和采样后的离散数据s(n),n =0,…,no,其中0 ~no为采样时间点。
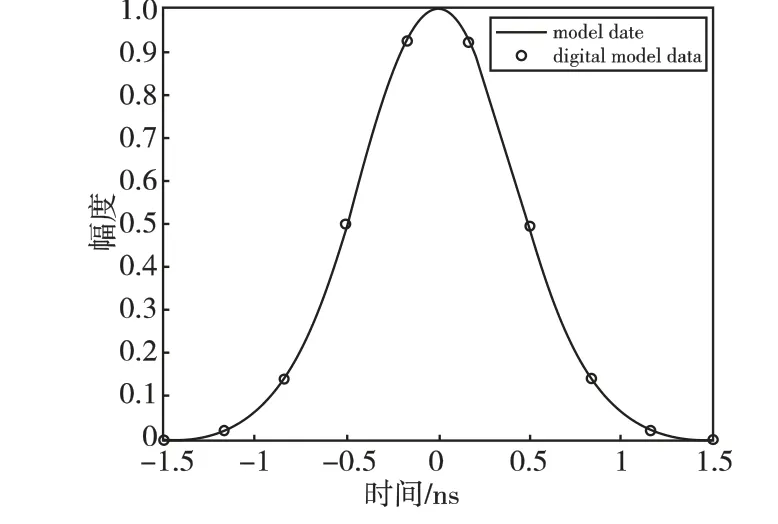
图3 激光发射脉冲模型Fig.3 The transmitting laser pulse
3.1.2 探测装置基本参数设定
利用表1的参数值仿真计算回波信号功率。
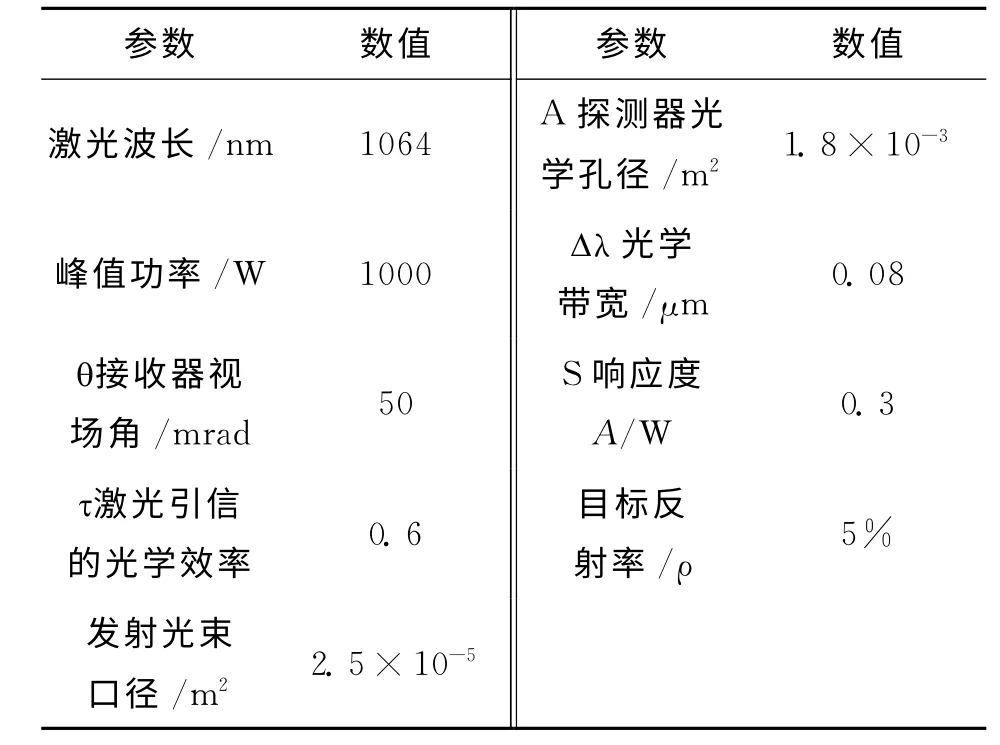
表1 探测装置的主要参数Tab.1 the mainparameters of device
3.1.3 空间云雾后向散射信号功率计算
利用表2所示对波长为1 064nm 的激光,不同云雾类型的消光系数和后向散射系数,设定空间中云雾的分布,进而通过式(2)激光雷达公式计算云雾背景下的回波信号功率为:

PL为激光峰值功率,τ为光学效率,A 为接收孔径面积。s(n)为激光发射脉冲波形函数,n取0~no为对应的采样时间点。
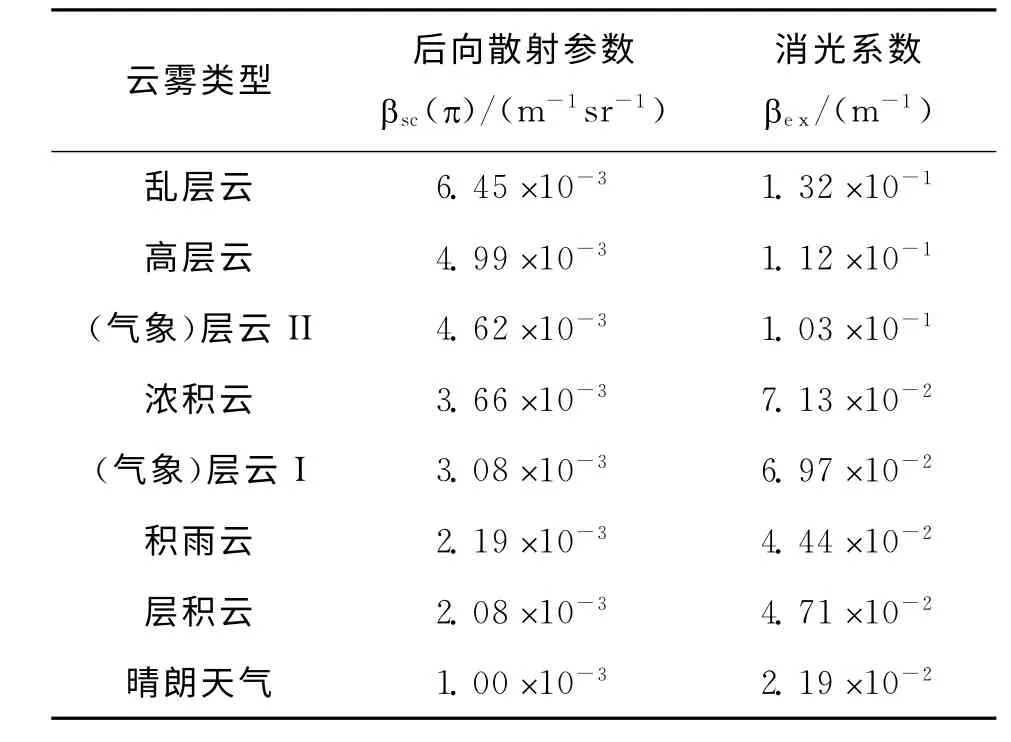
表2 常见云雾类型的后向散射系数和消光系数[12]Tab.2 The backscatteringcoefficients and extinction coefficients of the general cloud types
3.1.4 滑动窗变系数相关法信号处理
利用表2提供的云雾参数,随机设定空间中的云雾分布如图4(a)所示。加入基底噪声和高斯白噪声,产生回波信号如图4(b)所示,可以看出对于设定的云雾背景环境,回波信号中包含功率较高的云雾后向散射形成的展宽脉冲和功率很小的目标反射脉冲,对于这种回波信号传统的阈值门检测法会误判云雾回波为目标信号从而产生虚警。进行滑动窗变系数相关检测如图4(c)所示,云雾的相关系数约为0.03,目标的相关系数约为0.065。若设定一个相关系数的阈值为0.04时,可以较好检测出目标信号抑制云雾后向散射的干扰。
3.2 滑动窗变系数相关检测法的验证
对大量云雾空间分布不同的样本背景环境进行处理,验证在设定相关系数的阈值为υ=0.04时算法的成功率。
首先,利用表2构建空间云雾随机分布的探测背景环境,得到如图5所示的四种不同的随机云雾空间分布形式(a)、(b)、(c)、(d)。
其次,对于每种不同的云雾背景环境,验证在设定相关系数的阈值为υ=0.04时算法的成功率。规定云雾相关系数小于相关系数的阈值υ同时目标的相关系数大于相关系数的阈值υ,则表示算法有效。仿真产生大量随机生成的云雾背景环境样本,利用公式(8)计算回波功率,利用公式(7)计算相关系数,与相关系数的阈值υ作比较,验证算法成功率。

图4 云雾背景下信号处理过程Fig.4 The signal processing in the cloud background environment

图5 四种不同的云雾背景环境Fig.5 Four different types of cloud environment
统计得到相关系数的阈值设为υ=0.04时,对1 000次随机云雾背景环境进行处理,结果如表3所示。
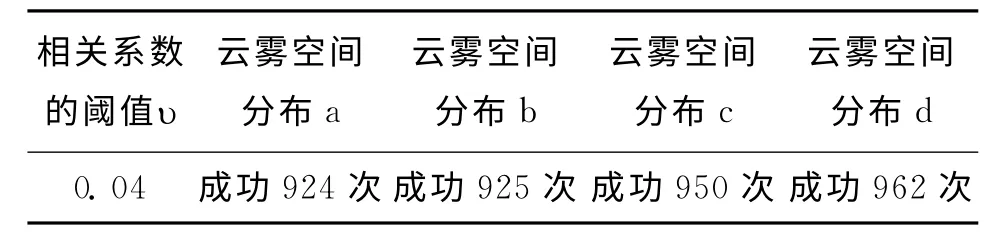
表3 进行1 000次运算对不同云雾背景环境的有效次数统计Tab.3 The effective counts in 1000times calculation with targets in different types of cloud background environment
从表3中的统计结果可以看出,对于设定的不同的云雾背景环境,算法的成功率大于92.4%。
对表3中有目标时检测失败的原因进行讨论,归结分类为:1)云雾相关系数大于相关系数的阈值υ(把云雾错当为目标);2)目标相关系数小于相关系数的阈值υ(丢失目标信息)。
对于只有云雾没有目标的情况下,验证算法成功率。规定如果云雾的相关系数小于相关系数的阈值则表示算法有效,对每种不同云雾背景环境,分别进行1 000次运算,根据表4的统计数据,验证算法成功率。
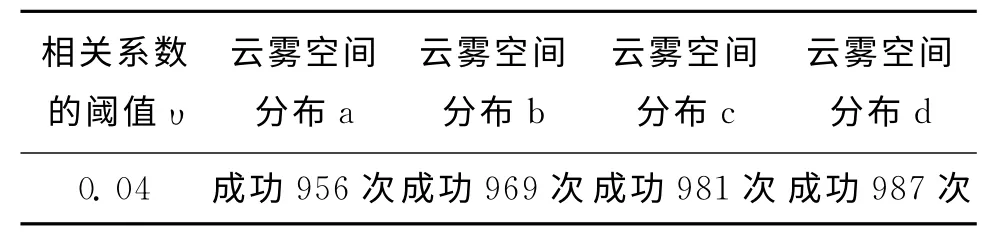
表4 无目标时,1 000次运算对不同云雾背景环境的有效次数统计Tab.4 The effective counts in 1000times c alculation without targets in different types of cloud background environment
从表5中可以看出,对于设定的云雾,无目标时算法的成功率大于95.6%。
4 结论
本文提出滑动窗变系数相关检测法,该方法基于互相关检测原理,采用发射信号作为滑动窗模板,利用云雾回波和目标反射回波与模板信号相关性不同,通过相关系数的差异来确定目标信息。仿真结果表明:对于通过对小样本的云雾背景环境条件下目标回波信号处理,代入引信系统参数,得到最佳相关系数阈值为0.04;进行1 000次不同环境条件下目标探测的样本验证,统计结果显示该算法正确地将目标从云雾背景环境中识别的概率可以达到92.4%;在小概率误识别中,31%是把云雾错当作目标,69%是没有发现目标信息,表明滑动窗相关检测法对激光引信在云雾环境中探测目标有较好的作用。
[1]王建国,杨高潮.空空导弹激光引信的基本问题与改进方向[J].航空兵器,2006(3):41-44.
[2]郭婧,张合,王晓峰.激光引信在降雨中的光束扩展特性[J].中国激光,2012,39(1):1-6.
[3]袁易君,任德明,胡孝勇.Mie理论递推公式计算相位散射函数[J].光散射学报,2006.17(4):366-371.
[4]张京国,高宠,刘建新,等.近距云雾回波蒙特卡罗模拟与实验测量[J].强激光与粒子束,2012,24(12):20-29.
[5]章正宇,眭晓林.激光测距弱信号数字相关检测技术的研究和仿真[J].中国激光,2002,29(7):661-665.
[6]肖红梅,吴建,陈长庚,等.微弱激光脉冲信号的相关检测[J].光学与光电技术,2004,2(1):61-63.
[7]陈生潭,郭宝龙,李学武,等.信号与系统[M].西安:西安电子科技大学出版社,2001.
[8]宋雪平,刘锋,覃一凡.云雾多次散射对激光散射信号生成的影响[J].红外与激光工程.2007,36:438.
[9]袁林,刘博,王邦新,等.车载式1064nm 米氏散射激光雷达的研制[J].中国激光,2010,37(7):17-24.
[10]Sandor Der,Brian Redman,Rama Chellappa.Simulation of error in optical radar range measurements[J].APPLIED OPTICS,1997,36(27):68-70.
[11]戴永江.激光雷达技术(上)[M].北京:电子工业出版社,2010:179-183.
[12]Carrier L W,Cato G A,Von Essen K J.The Backscattering and Extinction of Visible and Infrared Radiation by Selected Major Cloud Models[J].APPLIED OPTICS,1967,7(7):1209-1216.